тока и напряжения при изменении момента нагрузки. Это, в свою очередь, приводит к стабилизации величины абсолютного скольжения, т.е. к автоматическому поддержанию постоянной ско 12757 31 -рости вращения асинхронного двигателя. Устройство обеспечивает получение механических характеристик, идентичных характеристикам при регулировании с постоянным скольжением. 1 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1991 |
|
SU1823125A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Электропривод переменного тока | 1987 |
|
SU1429273A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
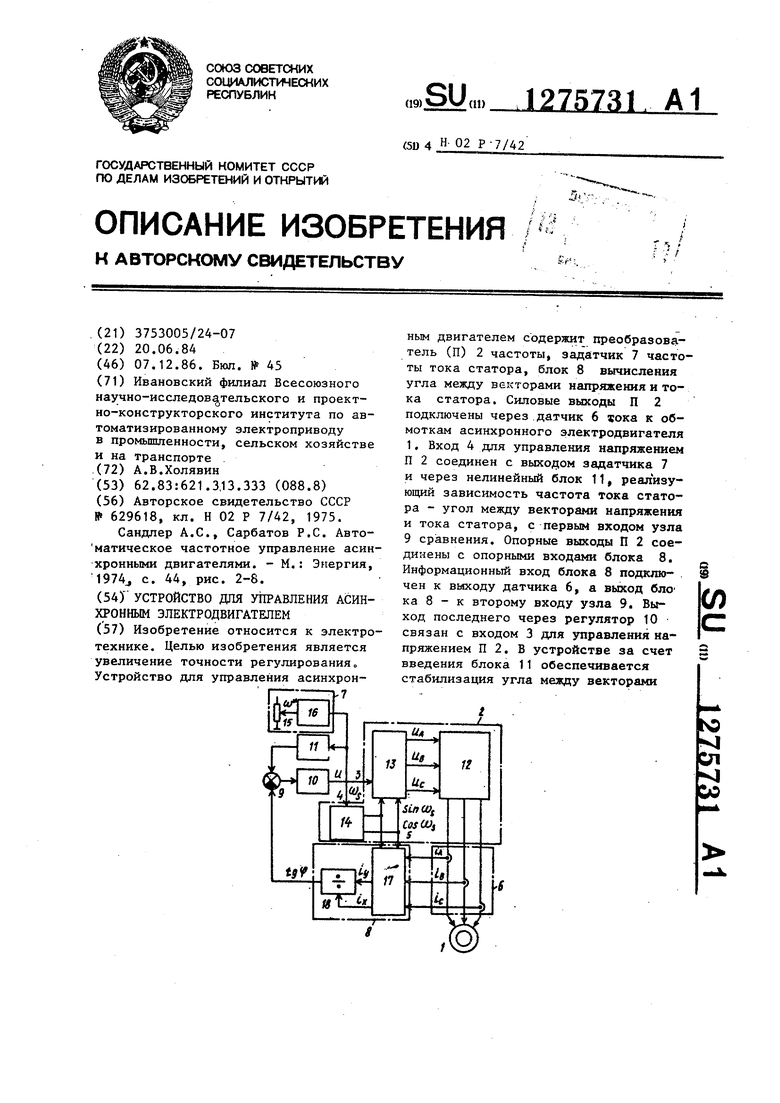
Изобретение относится к электротехнике и может быть использовано регулируемом электроприводе с асинхронным электродвигателем различного назначения. Цель изобретения повышение точ ности регулирования скорости за счет об еспечения жесткости механических характеристик электропривода, На чертеже представлена функциональная схема устройства для управления асинхронным электродвигателем Устройство для управления асинхронным электродвигателем 1 содержит преобразователь. 2 частоты с дву мя независимыми входами 3 и 4 для управления напряжением и частотой . соответственно, выходом 5 для опорных сигналов и силовым выходом, под ключенным через датчик 6 тока к обмотке статора асинхронного электродвигателя 1, задатчик 7 чй,стоты ток статора, подключенный к входу 4 для управления частотой преобразователя частоты, и блок 8 вычисления угла междз/ векторами напряжения и тока статора,-, соединенный информационными входами с выходами датчика 6 тока, опорным входом - с в:ыход,ом 5 дл опорных сигналов преобразователя 2 частоты, а вьвсодом - с первым входо узла 9 сравнения, подключенного через регулятор 10 к,входу 3 для управления напряжением преобразовател 2 частоты. В устройство введен нелинейный блок 11 реализации зависимости, частота тока статора - угол между векторами напряжения и тока статора, подключенный входом к выходу задатчика 7 частоты тока статора, а выходом - к второму входу узла 9 сравнения. В состав преобразователя 2 частоты входит силовая часть 12, выполненная по схеме автономного инвертора напряжения (АЙН) с ШИМ или по схеме непосредственного преобразования, блок 13 прямого преобразования координат 13 и генератор 14 синусоидальных сигналов, вход которого образует вход 4 для управления частотой преобразователя 2 частоты. Выход генератора. 14 синусоидальных сигналов подключен к опорному входу блока 13 прямого преобразования координат и одновременно образует выход 5 для опорных сигналов преобразователя 2 частоты. Выходы блока 13 прямого преобразования координат соединены с соответствующими управляющими входами силовой части 12. Задатчик 7 частоты тока статора содержит потенциометр 15 и задатчик 16 интенсивности. Блок 8 вычисления угла между векторами напряжения и тока статора содержит блок 17 обратного преобразования координат и подключенньй к его выходам блок 18 деления. Устройство работает следующим образом. Сигнал заданной скорости вращения, нимаемый с потенциометра 15, через адатчик 16 интенсивности управляет аботой генератора 14 синусоидальых сигналов. На выходе указанного енератора формируются сигналы синуа и косинуса единичной амплитуды астотойS пропорциональной выходноу сигналу задатчика 16 интенсивости. Эти сигна:1ы поступают на опорые входы блоков 13 прямого и 17 братного преобразования координат. а другой вход блока 17 обратного реобразования координат поступают игналы фазных токов с датчика 6 тока. В блоке 17 обратного преобразования координат происходит последовательное преобразование сигналов фазных токов из трехфазной ABC в двухфазную pt И систему координат и далее в систему вращайщихся координат X ij J ось X которой направлена по вектору напряжения статора. На выходе блока 17 формируются сигналы реактивной in и активной i составляющих тока статора. Эти сигналы поступают на вход, делителя и делимого блока 18 деления, на выходе которого вьщеляется сигнал, пропорциональный тангенсу угла между векторами напряжения и тока статора асинхронного электродвигателя 1, Этот сигнал сравнивается с заданным с помощью узла 9 сравнения. Результат рассогласования воздействует через регулятор 10 на вход 3 для управления напряжением преобразователя частоты . Задание на узел 9 сравнения поступает -с выхода нелинейного блока 11, подключенного входом к выходу задатчика 16 интенсивности. Реализуемая в блоке 11 зависимость основана на следующем. Из Т-образной схемы замещения асинхрон ного электродвигателя имеем выражение для коэффициента мощности k/ +no.|J +m a+boL-pt+c +d +eoi lb где oi. - отнесительная частота статора;/5 - абсолютное скольжение; а, Ь, с, d, е, k, т, п - коэффициен ты, определяемые конструктивными данными электродвигателя. Анализ приведенного выражения показывает, что при постоянной частоте подводимого к электродвигателю напряжения величина коэффициента мощ ности однозначно определяет абсолютное скольжение. Для того, чтобы обес печить регулирование с постоянным абсолютным скольжением и при изменении частоты, необходимо регулировать величину заданного) коэффициента мощ ности в функции относительной частоты статора в соответствии с указанным выражением, приняв в нем pi const. Уменьшение момента нагрузки на валу электродвигателя приводит к уменьшению активной и увеличению реактивной i. составляющих тока и, следовательно, к возрастанию- отношения iM/ij,tg4. Поскольку обратная связь по tgcf выполнена отрицательной, величина напряжения, подводимого к электродвигателю, будет уменьшаться до тех пор, пока величина tgCf не будет равна заданной. Таким образом осуществляется стабилизация угла между векторами напряжения и тока электродвигателя. Стабилизация угла между током и напряжением при изменении момента нагрузки приводит к стабилизации величины абсолютного скольжения, и, следовательно, автоматически поддерживается постоянной скорость вращения электродвигателя при заданной частоте. В устройстве обеспечиваются механические характеристики электропривода, идентичные характеристикам при регулировании с постоянным скольжением. Таким образом, введение в предлагаемое устройство нелинейного , реализующего зависимость частота тока статора угол между векторами напряжения и тока статора обеспечивает в сравнении с известным увеличение точности регулирования скорости за счет обеспечения жесткости механических -характеристик. Формула изобретения Устройство для управления асинхронным электродвигателем, содержащее преобразователь частоты с двумя независимыми входами для управления напряжением и частотой, выходом для опорных сигналов и силовым выходом, подключенным через датчик тока к обмотке статора асинхронного электродвигателя, задатчик частоты тока статора, подключенный к входу для управления частотой преобразователя частоты, и блок вычисления угла между векторами напряжения и тока статора, соединенный информационными входами с выходами датчика тока,опорным входом - с выходом для опорных сигналов преобразователя частоты, а выходом - с первым входом узла сравнения, подключенного через регулятор к входу для управления напряжением преобразователя частоты, отличающееся тем, что, с целью
S1275731Ф
повышения точности регулирования ско- угол между векторами напряжений и рости за счет обеспечения жесткости тока статора, подключенный входом к механических характеристик, в него выходу задатчика частоты тока ставведен, нелинейный блок реализации тора, а выходом -.к второму входу зависимости частота тока статора - s Узла сравнения.
| Устройство для регулирования асинхронного двигателя | 1975 |
|
SU629618A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сандлер А.С., Сарбатов Р.С | |||
| Авто матическое частотное управление аси хронными двигателями | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
