СЛ
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1990 |
|
SU1778906A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |

Использование: в автоматизированном электроприводе переменного тока. В частотно-регулируемый электропривод введены преобразователь 9 напряжение-частота, датчики 10 напряжения и блок 12 определения ЭДС. Это повышает точность регулирования скорости, так как повышается жесткость механических характеристик электропривода. 3 ил.
со ю со
го ел
(Dual
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе переменного тока.
Цель изобретения - упрощение устройства и повышение точности регулирования за счет обеспечения жесткости механических характеристик.
На фиг. 1 представлена функциональная схема частотно-регулируемого электропривода; на фиг.2 - функциональная схема блока определения ЭДС; на фиг.З - векторная диаграмма, поясняющая работу частотно- регулируемого привода.
Частотнофегулируемый электропривод (фиг.1), содержащий асинхронный двигатель 1, статорные обмотки которого через датчики тока 2 подключены к выходу силового преобразователя частоты 3. управляющие входы которого соединены с выходами блока прямого преобразования координат 4, снабженного двумя входами, один из которых соединен с выходом регулятора 5, входом подключенного к выходу элемента сравнения 6, один вход которого служит для подачи сигнала задания угла между вектором тока и вектором ЭДС, а другой вход соединен с выходом блока деления 7, и за- датчик интенсивности 8.
В частотно-регулируемый электропривод введены преобразователь напряжение- частота 9 и датчики напряжения 10, входами подключенные к выходу силового преобразователя частоты 3, и блок определения ЭДС 11 с тремя входами 12, 13, 14 и двумя выходами, соединенными с соответствующими входами блока деления 7, выход задатчика интенсивности 8 через преобразователь напряжение-частота 9 подключен ко второму входу блока прямого преобразования координат 3 и к первому входу блока определения ЭДС 12, второй 13 и третий 14 входы которого соединены соответственно с выходами датчиков тока 2 и напряжения 10,
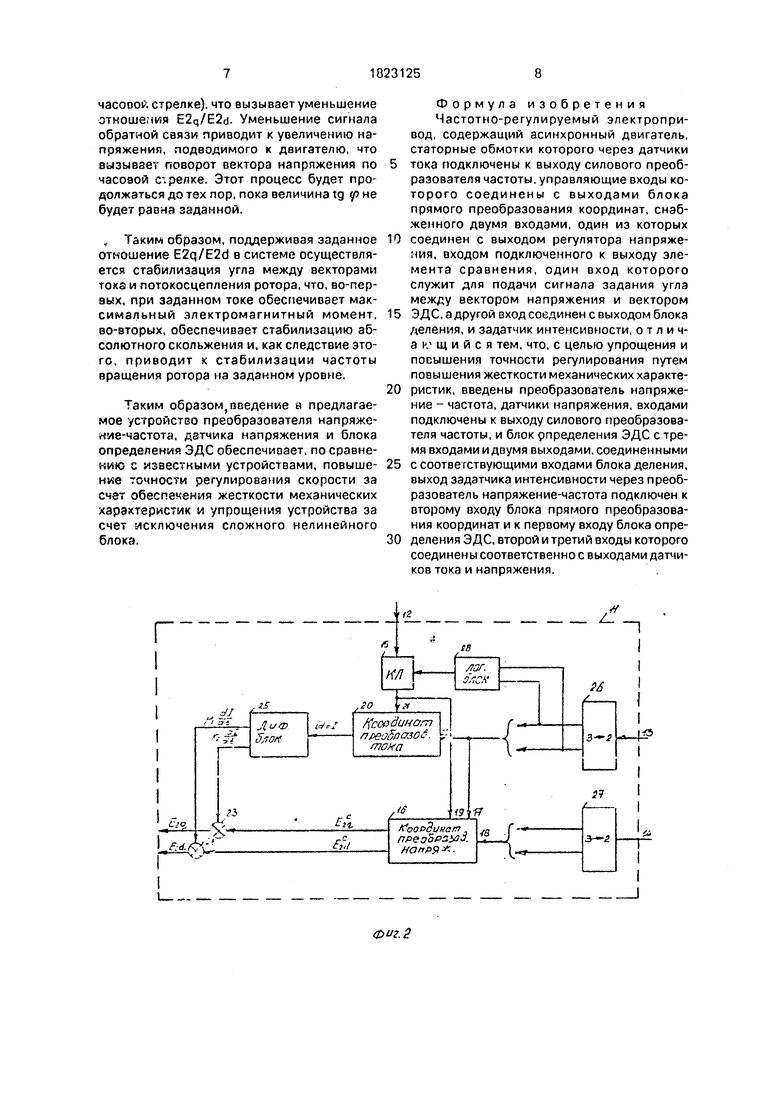
Блок определения ЭДС (фиг.2) состоит из ключа 15, на вход 12 которого поступает последовательность импульсов из преобразователя напряжение-частота 9, а выход ключа 15 соединен через частотные входы 16, 17 соответственно с координатным преобразователем напряжения 18 и тока 19, а выходы датчиков тока 2 через вход 13 соединен с преобразователем координат тока три в два 20, выходы которого соединены с логическим блоком 21, токовым входом 22 координатного преобразователя тока 19 и токовым входом 23 координатного преобразователя напряжения 18, а выход логического блока 21 соединен с управляющим входом ключа 15. Выходы датчиков фазных
0
5
0
5
0
5
0
5
0
5
напряжений 10 через вход 14 соединены с преобразователем координат напряжения три в два 24, выходы которых через вход 25 соединены с координатным преобразователем напряжения 18, выходы которого соединены с первым 26 и вторым 27 вычитателем, вторые входы которых через дифференцирующий блок 28 соединены с выходом координатного преобразователя тока 19, а выходы вычитателей 26 и 27 образуют выход блока определения составляющих ЭДС ротора E2q и .
Все блоки частотно-регулируемого привода (фиг.1) являются стандартными и их работа описана в прототипе.
На рис.3 приведена диаграмма, поясняющая расположение составляющих напряжений для момента времени, когда результирующий вектор тока совпадает с действительной осью, направленной по оси фазы А. Величина отрезка АВ (угол АОВ /) определяет отставание потокосцепления от ро (или отставание вектора ЭДС Е2 от вектора ЭДС ЕО) и характеризует скольжение.
Определение составляющих вектора ЭДС E2d и E2q через составляющие напряжение Ud и Uq, модуль тока 1, частоту w и параметры двигателя R, Li1 (R - активное сопротивление; Li - переходная индуктивность статора, а - круговая частота поля статора) так же изображены на рис.3.
В переходных режимах угол между вектором напряжения и вектором ЭДС Е2 увеличивается, так как к соответствующим падениям напряжения на активном и индуктивном сопротивлениях, зависящим от модуля тока добавляется падение напряжения, зависящее от производной тока. Причем величина падения напряжения на активном сопротивлении в переходных режимах пропорционально переходной индуктивности статора К i -т- ( KI L 1 )(Э
величина падения напряжения на индуктивном сопротивлении в переходных режимах пропорциональна изменению частоты тока ротора (или изменения угла/), которое можно, с некоторым приближением, заменить производной модуля тока,
Частотно-регулируемый электропривод работает следующим образом. На первый вход элемента сравнения 6 подается сигнал tg рз, соответствующий требуемому углу между составляющими ЭДС. Наиболее экономичный режим будет при условии, когда вектор тока совпадает с действительной осью, тогда E2d E2q. В этом случае угол между вектором тока статора и потокосцеплением ротора равен 45°, что соответствует максимальному электромагнитному моменту. При E2q E2d электромагнитный момент, при равных значениях тока, падает, но зато понижаются требования к быстродей- ствию системы. В этом случае объект регулирования будет обладать некоторым самовыравниванием, т.е. при увеличении нагрузки угол между током и потокосцепле- нием ротора будет расти, что приведет к увеличению момента за счет внутренних характеристик объекта.
Предположим, для конкретности, что E2d E2q. Сигнал ошибки tg Ay tg р з - tg p j (где (рф - фазовый сдвиг между составляю- щим ЭДС ротора или между вектором ЭДС ротора и током статора) подается через регулятор 5 на аналоговый вход блока прямого преобразователя координат 4, на частотный вход которого от задатчика интенсивности 8 через преобразователь напряжение-частота 9 подается частотный сигнал. На выходе блока прямого преобразования координат 4 в декартовой системе координат, действительная ось которой совпадает с вектором напряжения, появляется трехфазный задающий сигнал, который, через преобразователь частоты 3 подается на статорные обмотки асинхронного двигателя 1. Фазные токи изменяются датчиками 2 фазных токов и подаются через вход 13 на блок 20 преобразования координат тока три в два. При переходе выходного сигнала 1q блока 20 через нуль срабатывает логический блок 21 и ключ 15 начинает пропускать последовательность импульсов. 8 блоке 19 преобразования координат тока из последовательности импульсов и сигналов Id и Iq формируется результирующий вектор тока во вращающейся системе координат. Так как переход во вращающуюся систему координат происходит тогда, когда вектор совпадает с действительной осью, то на выходе блока 19 преобразования координат тока появляется сигнал, пропорцио- нальный модулю тока, который подается на дифференциатор 28, в котором не только осуществляется дифференцирование модуля тока, но и производная модуля проходит через два масштабных усилителя. Один из усилителей определяет коэффициент Ki при производной вдоль действительной оси, а второй К2 - вдоль мнимой оси. Таким образом, на входе дифференцирующего блока 28 появляются два сигнала в соответствии с двумя составляющими падения напряжения, определяемыми величинами производных, изображенных на фиг.З.
Фазные напряжения изменяются датчиками 10 и подаются через вход 14 на блок
24 преобразования координат напряжения три в два. В момент совпадения результирующего вектора тока с действительной осью (фиг.З) включается ключ 15 и в блоке 18 из последовательности импульсов начинает формироваться результирующий вектор напряжения во вращающейся системе координат (фиг. 3), который задается своими проекциями Ud и Uq. Далее в блоке 16 из составляющей Ud вычитается падение напряжения на активном сопротивлении обмотки статора, а из составляющей Uq вычитается падение напряжения на переходной индуктивности обмотки статора и на выходе блока 18 появляются составляющие ЭДС Е2ЧС и E2dc статического режима, в системе координат, действительная ось которой совпадает с вектором тока. Далее из статических составляющих ЭДС в сумматорах 26 и 27 вычитаются производные тока и на входе блока 11 появляются полные составляющие ЭДС E2q и E2d, поступающие на блок деления 7, в котором определяется тангенс угла между составляющими ЭДС в системе координат, действительная ось которой совпадает с вектором тока. Выходной сигнал блока деления 7, пропорциональный текущему тангенсу угла между составляющими ЭДС в системе координат тока статора, подается на элемент сравнения 6, где сравнивается с задающим сигналом. Результат рассогласования воздействует через регулятор 5 на первый вход блока прямого преобразования координат 4. Изменение сигнала на входе блока 4 прямого преобразования координат приводит к изменению выходного напряжения силового преобразователя 3 таким образом, чтобы фазовый сдвиг между составляющими ЭДС в системе координат тока был равен заданному. Например, при уменьшении нагрузки на валу электродвигателя угол между вектором тока статора 1 и потокосцеплением ротора tyi уменьшается (уменьшается абсолютное скольжение, уменьшается угол АОВ). Так как угол между Е2 и р2 равен 90°, то уменьшение нагрузки приводит к повороту вектора напряжения и вектора ЭДС Е2 против часовой стрелки, что вызовет возрастание соотношения E2q/E2d. При отрицательной обратной связи увеличение E2q/E2d tg . приводит к уменьшению напряжения на выходе преобразователя, к уменьшению оборотов и стабилизации режима при заданном угле между вектором ls и 2 при пониженном напряжении на двигателе.
При увеличении нагрузки угол между ls и растет (вектор Е2 поворачивается по
часовой стрелке), что вызывает уменьшение отношения E2q/E2d. Уменьшение сигнала обратной связи приводит к увеличению напряжения, подводимого к двигателю, что вызывает поворот вектора напряжения по часовой с-.релке. Этот процесс будет продолжаться до тех лор, пока величина tg f) не будет равна заданной.
, Таким образом, поддерживая заданное отношение E2q/E2d в системе осуществляется стабилизация угла между векторами тока и потокосцепления ротора, что, во-первых, при заданном токе обеспечивает максимальный электромагнитный момент, во-вторых, обеспечивает стабилизацию абсолютного скольжения и, как следствие этого, приводит к стабилизации частоты вращения ротора на заданном уровне.
Таким образом,введение а предлагаемое устройство преобразователя напряжение-частота, датчика напряжения и блока определения ЭДС обеспечивает, по сравнению с известными устройствами, повышение точности регулирования скорости за счет обеспечения жесткости механических характеристик и упрощения устройства за счет исключения сложного нелинейного блока.
Г
di
.
Формула изобретения Частотно-регулируемый электропривод, содержащий асинхронный двигатель, статорные обмотки которого через датчики
тока подключены к выходу силового преобразователя частоты, управляющие входы которого соединены с выходами блока прямого преобразования координат, снабженного двумя входами, один из которых
соединен с выходом регулятора напряжения, входом подключенного к выходу элемента сравнения, один вход которого служит для подачи сигнала задания угла между вектором напряжения и вектором
ЭДС, а другой вход соединен с выходом блока деления, и задатчик интенсивности, о т л и ч- а к щ и и с я тем, что, с целью упрощения и повышения точности регулирования путем повышения жесткости механических характеристик, введены преобразователь напряжение - частота, датчики напряжения, входами подключены к выходу силового преобразователя частоты, и блок рпределения ЭДС с тремя входами и двумя выходами, соединенными
с соответствующими входами блока деления, выход задатчика интенсивности через преобразователь напряжение-частота подключен к второму входу блока прямого преобразования координат и к первому входу блока определения ЭДС, второй и третий входы которого соединены соответственно с выходами датчиков тока и напряжения.
ftcopdunam I
vwjSaasOif E-
3-2
-&
3-2
К
u
Фиг д.
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Авторское свидетельство СССР № 1534734.кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Устройство для управления асинхронным электродвигателем | 1984 |
|
SU1275731A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
