Изобретение относится к механизации и автоматизации вспомогательных производственных операций, в частности к механизации и автоматизации перемещения изделия между транспортным средством и обрабатывающим оборудованием.
Целью изобретения является повышение надежности за счет снижения динамических нагрузок в звеньях манипулятора.
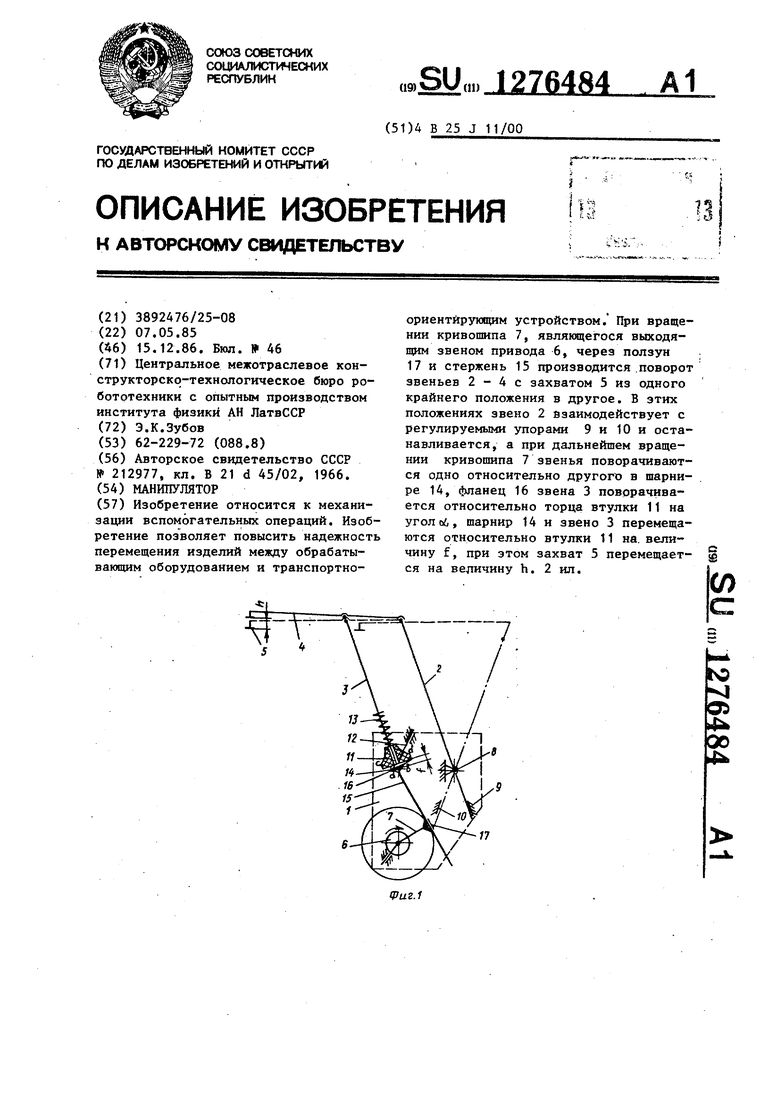
На фиг И показана кинематическая схема устройства (в крайнем положении); на фиг.2 - то же (в другом крайнем положении).
Манипулятор состоит из основания 1, шарнирно связанного с ним исполнительного органа в виде параллелограммного механизма, содержащего поворотное звено 2, приводное поворотное звено 3, соединительное звено 4 с захватом 5, и привода 6, выходным звеном которого является кривопгип 7. Поворотное звеносвязано с основанием шарниром 8 и взаимодействует в своих крайних положениях с регулиру емыми упорами 9 и 10. Приводное поворотное звено 3 связано с основанием шарниром, выполненным в виде втулки 11, закрепленной на оси 12, распо ложенной перпендикулярно плоскости звеньев параллелограмма. На звене 3 закреплен конец пружины 13, второй конец которой контактирует с торцом втулки 11. Со звеном 3 с помощью шар нира 14 связан стержень 15 на котором закреплен фланец 16, контактирующий с другим торцом втулки 11. На стержне 15 закреплен фланец 16, контактирующий с другим торцом втулки 11, и установлен ползун 17, шарнирно связанный с кривошипом 7.
Манипулятор работает следуюш,им образом.
При вращении кривошипа 7 от приво да 6 через ползун 16 поворачивается вокруг оси 12 стержень 15, поворачивая звенья 2-4 параллелограммного механизма в одно из крайних положени (фиг.1). В этом положении звено 2 контактирует с упором 9, а кривошип 7, продолжая вращаться, поворачивает в шарнире 14 стержень 15 относительн
звена 3. При этом фланец 16 поворачивается относительно торца втулки 11 на yrojisu, звено 3 перемещается во втулке 11 в направлении привода на величину f, сжимая щэужину 13,. и захват 5 опускается на величину h. При дальнейшем вращении кривошипа пружина 13 разжимается, звено 3 перемещается во втулке 11 в обратном направлении до тех пор, пока фланец 16 не упрется в торец втулки 11, и захват поднимается на величину h. Далее параллелограммный механизм перемещает захват в другое крайнее положение, где повторяется то же движение захвата.
Формула изобретения
Манипулятор, содержащий шарнирно связанный с основанием исполнительный орган в виде паралл&пограммного механизма с захватом и привод, закрепленный на основании, выходное звено которого кинематически связано с приводным звеном параллелограммного механизма, отличающийся тем, что, с целью повьш1ения надежности за счет снижения динамических нагрузок, на основании установлены два регулируемых упора с возможностью взаимодействия с поворотным звеном параллелограммного механизма, а приводное поворотное звено выполнено из двух шарнирно связанных между собой стержней, причем шарнир, связывающий указанное звено с основанием, выполнен в виде втулки, смонтированной с возможностью поворота вокруг оси, расположенной перпендикулярно плоскости звеньев параллелограмма, этом один из стержней приводного поворотного звена размещен в отверстии втулки и подпружинен относительно нее в осевом направлении, а другой стержень снабжен фланцем, расположенным с возможностью взаимодействия с торцом втулки, при зто1 выходное зёено привода выполнено в виде кривошипа, кинематическая связь которого с приводным звеном осуществляется посредством ползуна, установленного на втором стержне и шарнирно связанного с кривошипом.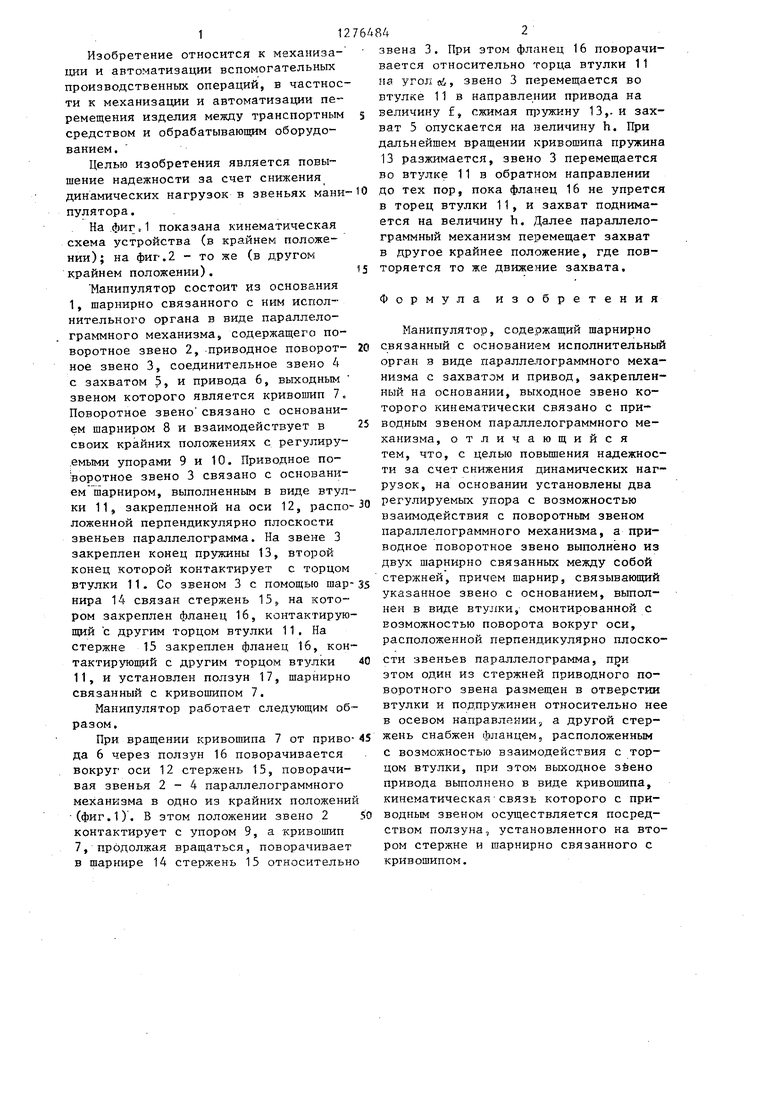
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| КРЕПЬ СОПРЯЖЕНИЯ | 1992 |
|
RU2072050C1 |
| Устройство для подачи заготовок в рабочую зону обрабатывающей машины | 1989 |
|
SU1754291A1 |
| УСТРОЙСТВО для УДАЛЕНИЯ ДЕТАЛЕЙ ПРИ ЛИСТОВОЙШТАМПОВКЕ | 0 |
|
SU212977A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
