ю
ч1
00
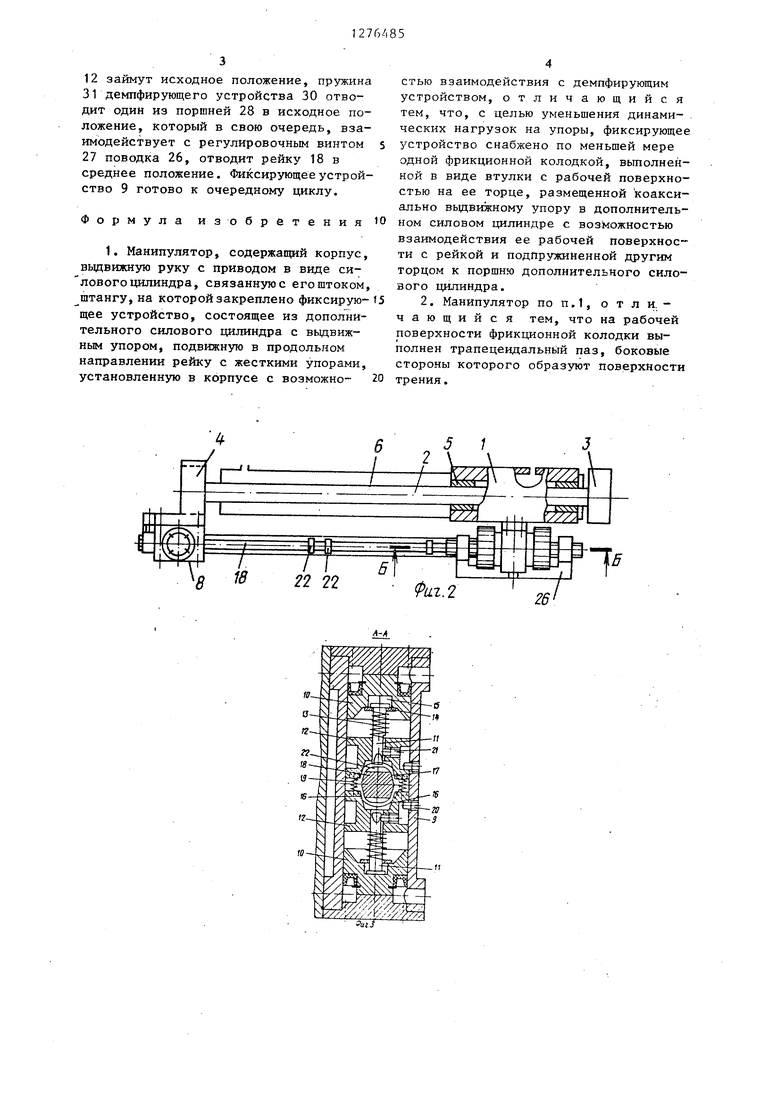
ел Изобретение относится к общему машиностроению, в частности к манипуляторам и промышленным роботам. Целью изобретения является уменьшение динамических нагрузок ка упорах манипулятора. На фиг.1,2 изображен манипулятор, обш;ий вид; на фиг.З - разрез А-А на фиг.1 (фиксирующее устройство); на фиг.4 - сечение Б-Б на фиг.2 (демпфирующее устройство). Манипулятор содержит корпус 1 и вьщвижную руку, состоящую из двух штанг 2 и фланцев 3 и. 4. Штанги 2 установлены во втулках 5 корпуса 1,. В пространстве, заключенном меж,цу , фланцами 3 и 4 и штангами 2, размещен привод вьщвижной руки 1, состоящий из жестко закрепленного в корпусе 1, силового цилиндра 6 имеющего поршень со штоком 7, соединенным: с фланцем 3. К фланцу 4 руки прикрепле но фиксирующее устройство 8, состоящее из дополнительного силового цилиндра 9 с встречно направленными поршнями 10 и вьщвижными упорами 11, концентрично которым установлены фрикционные колодки 12, выполненные в виде втулок. Пружины 13 опираются одним концом в фрикционные колодки 12, а другим в разграничительные шайбы 14 поршней 10, имеющих углубления 15, в которых размещены головки вьщвижных упоров 11 с осевым зазором. Каждая фракционная колодка 12 име ет трапецеидальный паз, боковые стен ки которого образуют поверхности 16 трения,, взаимодействуюш е ,с продольными лысками 17 рейки 18. Фрикционны колодки 12 разжаты дополнительными пружинами 19 до упора, например, в установочные винты 20 с образованием минимальных зазоров между поверхностями 16 и 17. Каждая фрикционная колодка 12 ограничена от проворота вин том 21 . На рейке 18 вьтолнены жесткие упо ры в в;иде поперечных пазов 225 координаты которых соответствуют заданны позициям конкретного технологическог цикла. Рейка 18 установлена в опорах 23 и 24, одна из которых закреплена на фланце 4, а другая - на корпусе 1 Хвостовик рейки 18 закреплен нажимны ми болтами 25 в поводке 26. Поводок 26 снабжен двумя регулировочными вин тами 27, упирающимися в поршни 28 ци 852 линдра 29 демпфирующего устройства 30J закрепленного на корпусе 1. Поршни 23 разжаты пружиной 31. Замкнутое межпоршневое пространство 32 образует воздушную подушку. Манипулятор работает следующим образом. При подаче воздуха в одну из полостей силового цилиндра 6 его шток 7 перемещает подвижную руку вместе с фиксируюпщм устройством 8 вдоль рейки 18. Б момент подхода руки в заданную позицию от датчика положения (не показан) команда поступает на дополнительный силовой цилиндр 9, поршни 10 которого, перемещаясь, сзшмают через разграничительные шайбы 14 основные пружины 13, усилие которых передается на фрикционные колодки 12.Преодолевая усилие дополнительных пружин 19, основные пружины 13 прижимают фрикционные колодки 12 к рейке 18. В нача- льной стадии торможения упругие силы воздушной подушки демпфирующего. устройства 30 незначительны, а силы трения, возникающие при взаимодействии поверхностей 16 и 17, нарастая, обеспечивают кратковременное удержание и совместное перемещение рейки 18 с фиксирующим устройством 8, уравнивая скорости их перемещения. Последующее движение поршней 10 обеспечивает утапливание зубьев вьздвижных упоров 11 в пазы 22 рейки 18. При дальнейшем перемещении руки согсротивление демпфирующего устройства нарастает и зубья выдвргжных упоров 11, скользя своими торцами по основанию пазов 22 рейки 18, безударно упираются в их боковые поверхности. При зтом наступает завершающая стадия .-орможения руки, когда поршни 2В демпфирующего устройства 30 смыкаются своими торцовыми поверхностями. Так завершается торможение и фиксация руки в заданной позиции рабочего пространства. При снятии давления с полостей силового цилиндра 9 его поршни 10 посредством пружин 13 возвращаются з ис.ходноеположение. BiviecTe с поршнями 10 перемещаются разгра::-шчительные шайбы 14 и, упираясь в головки выдвижных упоров 11, возвращают их в исходное положение. После этого усилием дополнительных пр-ужин 19 фрикционные колодки 12 возвращаются в исходное-положение до упора в установочные винты 20, Как только фрикционные колодки
12 займут исходное положение, пружина 31 демпфирующего устройства 30 отводит один из поршней 28 в исходное положение, который в свою очередь, взаимодействует с регулировочным винтом 27 поводка 26, отводит рейку 18 в среднее положение. Фиксирующее устройство 9 готово к очередному циклу.
изобретения О
о р м у л а
1. Манипулятор, содержапщй корпус, выдвижную руку с приводом в виде силового цилиндра, связанную с его штоком, штангу, на которой закреплено фиксирую- 5 щее устройство, состоящее из дополнительного силового цилиндра с выдвижным упором, подвижную в продольном направлении рейку с жесткими упорами, установленную в корпусе с возможно- 20
стью взаимодействия с демпфирующим устройством, отличающийся тем, что, с целью уменьшения динамических нагрузок на упоры, фиксирующее Зстройство снабжено по меньшей мере одной фрикционной колодкой, вьтолненной в виде втулки с рабочей поверхностью на ее торце, размещенной коаксиально вьщвижному упору в дополнительном силовом цилиндре с возможностью взаимодействия ее рабочей поверхности с рейкой и подпружиненной другим торцом к поршню дополнительного силового цилиндра.
2. Манипулятор по п.1, о т л и.чающийся тем, что на рабочей поверхности фрикционной колодки выполнен трапецеидальный паз, боковые стороны которого образуют поверхности трения.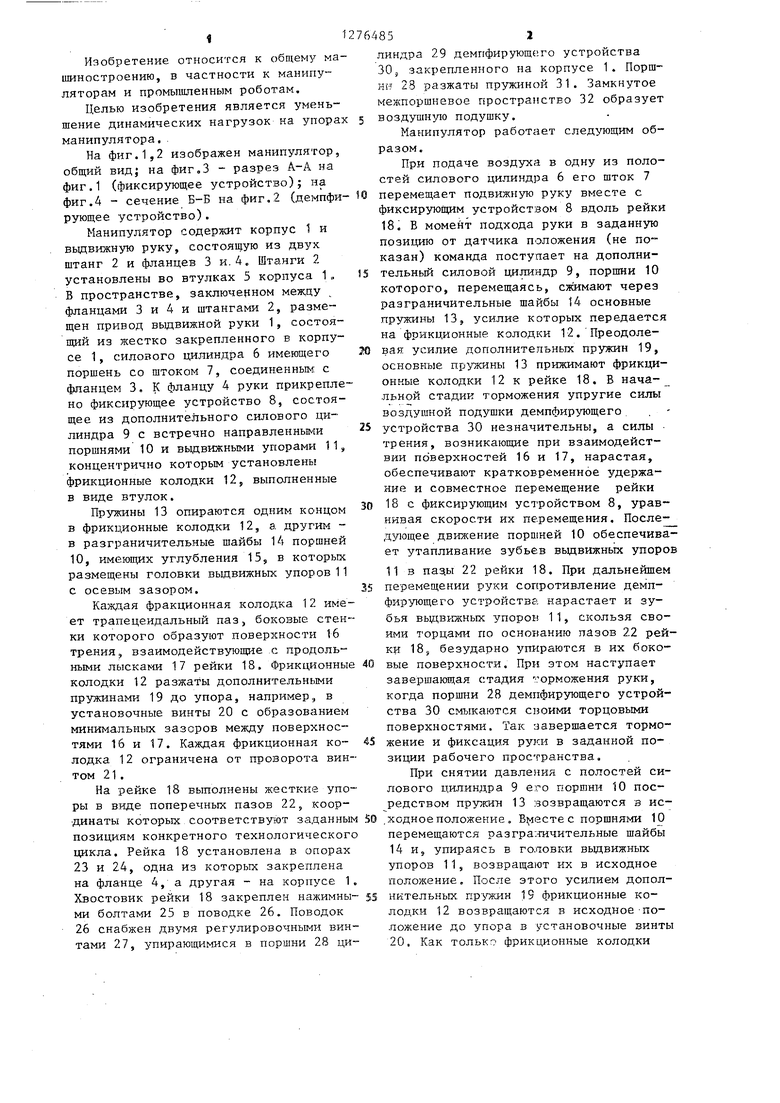
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1976 |
|
SU598753A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Намоточно-размоточное устройство для металлической полосы | 1985 |
|
SU1274796A1 |
| УСТРОЙСТВО ЗАПИРАНИЯ ЗАТВОРА СТРЕЛКОВОГО ОРУЖИЯ (ВАРИАНТЫ), СПОСОБ ЗАПИРАНИЯ ЗАТВОРА И ДВУХСТУПЕНЧАТЫЙ ГАЗОВЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2294506C2 |
| Перегрузочное устройство для изде-лий | 1979 |
|
SU816897A1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Автомат для гидропластической обработки цилиндрических зубчатых колес | 1985 |
|
SU1593974A1 |
| Стенд для выпрессовки шкворня | 1976 |
|
SU653076A1 |
| Устройство для определения деформационных свойств грунтов | 1987 |
|
SU1511333A1 |

Изобретение относится к машиностроению, .в частности к промышленным роботам и манипуляторам. Цель изобре;тения состоит в создании манипулятора повышенной надежности с большим числом точек позиционирования без потери при .этом быстродействия. Манипулятор содержит корпус 1 и механическую руку, состоящую из фланцев 3 и 4 и двух штанг 2. К фланцу 4 механической ; руки прикреплено фиксирукнцее устройство, вьтолненное в виде сдвоенного пневмощшиндра 9 с встречно-направленными поршнями, в поперечном сквозном отверстииKOTdporo размещена рейка 18. Фрикционные колодки охватывают рейку 18. В сквозном отверстии фрикционных колодок базируются вьщви ные упоры, причем головка каждого вьщвижного упора отделена от. основной пружины, связывающей поршни пневмоцилиндра 9 и фрикционные колодки, шайбой и размещена в углублении поршня с осёвьм зазором,.величина которого превышает i величину хода фрикционных колодок, 1 з.п. ф-лы, 4ил. (Л С
25 26
32 28
ФигЛ
| Манипулятор | 1976 |
|
SU598753A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
