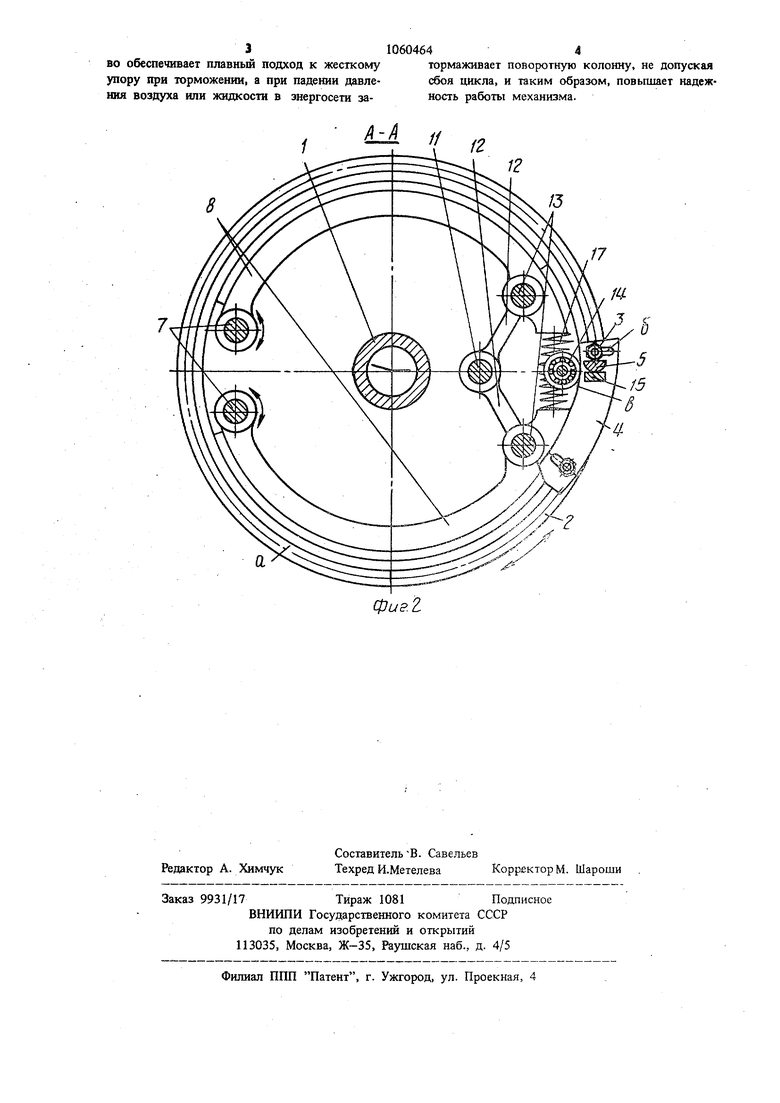
Изобретение относится к механизации м автоматизации производственных процессов, в частности к механизмам поворота промышленных роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народного хозяйства. Известен механизм поворота промышленного робота, у которого механизм позиционирования имеет выдвижной упор для осуществления промежуточной остановки руки при повороте вокруг вертикальной оси. Выдвижение зтого упора осуществляется с помощью пневмоцилиндра 1. Недостатком зтого механизма является то, что он не позволяет получать более чем одну промежуточную остановку руки робота при повороте ее из одного крайнего положения в другое. Известен также механизм поворота промыш ленного робота, обеспечивающий остановку руки в нескольких промежуточных точках 2}. Недостатком этого механизма является уста новка выдзижного упора и привода его перемea eния на подвижной траверсе, что усложняегг конструкцию механизма, а при падении дав ления в энергосети рука может произвольно проворачиваться, что снижает надежность устройства в целом. Цель изобретения - упрощение конструкции механизма и повышение его надежностн. Указанная цель достигается тем, что меха низм поворота промышленного робота, содержащий корпус, поворотную колонну, привод ее поворота, механизм позиционирования выдвижной и регулируемый упоры, механизм позиционирования вьшолнен в виде серег и двух подпружиненных одна относительно другой тор мозных колодок, шарнирно соединенных с кор пусом и серьгами, причем последние шарнирно соединены с выдвижным упором, а привод закреплен на том же корпусе, при этом на регулируемом упоре вьшолнен криволинейный скос, для взаа1модействующий с выдвижным упором. На фиг. 1 схематически изображен.предлагаемьш механизм, общий вид; на фиг. 2 - разрез А-А на фиг. 1. Механизм поворота промьниленного робота включает поворотную колонну 1, получающую поворот от отдельного привода (не показан), на которой жестко закреплен тормозной диск 2, имеющий на торцовой поверхности кол1 цевой паз а, к которому с помощью болтов 3 крепятся в требуемом угловом положении регулируемые упоры 4, содержащие пазы б, поз воляющие регулировать упоры 4 в радиальном направлении. На этих упорах есть выступ 5, который служит в качестве жесткого упора. К неподвижному корпусу 6 крепятся опорные оси 7 тормозных колодок 8, а также направляющие 9, вдоль которых перемещается ползун 10, несущий подвижную ось 11 рычагов 12, соединяющих ползун Ю с тормозными колодками 8 при помощи осей 13. Ползун 10 является несущим звеном подшипника 14, который в момент торможения контактирует с рабочей поверхностью в упора 4. На ползуне 10 есть выступ 15, который играет роль вьщвижного упора. Ползун 10 с помощью штока 16 соединен с приводом (не показан) перемещения ползуна 10, а следовательно, с перемещением вьщвижного упора 15 и через ось 11, рычаги 12, оси 13, колодки 8 с торможением привода. Между тормозными колодками установлена пружина 17, стремящаяся прижать колодки к диску 2. Механизм работает следующим образом. При повороте колонны 1 по часовой стрелке и при поступлении сигнала о начале торможения срабатывает привод выдвижения упора, который с помощью штока 16 перемещает ползун 10 и выдвижной упор 15 вправо до контакта лодщипника 14 с рабочей частью в упора 4. По мере поворота вала вместе с диском 2 поворачивается и упор 4. При этом радиус рабочей части в упора 4 возрастает, что позволяет дополнительно перемещаться ползуну 10 вправо и через рычаги 12 выдвигать колодки 8, постепенно прижимая их к внутренней поверхности тормозного барабана. Такая согла сованность движений, обеспечиваемая с помощью одного привода, позволяет выдвигать упор и плавно тормозить привод поворота робота. В конечный момент торможения вые. туп 5 на упоре 4 подходит к выдвижному упору 15 и происходит окончательная остановка движения. Безударность остановки достигается регулировкой упора 4 в радиальном направлении по пазам б, в результате чего изменяется интенсивность торможения. При поступлении сигнала на продолжение вращения вала срабатывает привод упора, который с помощью щтока 16 перемещает ползун 10 и упор 15 влево, разъедияя т.о. контакт улоров 5 и 15, а также сближает колодки 8 через рычаги 12, осуществляя растормаживание механизма поворота. После заверщения этих движений подается команда на включение привода поворота колонны 1. При подходе очередного упора 4 цикл торможения и остановки повторяется. Установка пружины 17 между колодками 8 позволяет прижать их при падении давления в энергосети к диску 2, затормозив его и предотвратив т.о. возможность изменения его углового положения. ycTaHOBfca вьщвижного упора и его привода на неподвижном корпусе упрощает конструкцию механизма поворота, тормозное устройст310604644
во обеспечивает плавный подход к жесткомутормаживает поворотную колонну, не допуская
упору при торможении, а при падении давле-сбоя цикла, и таким образом, повышает надежния воздуха или жидкости в энергосети за-иость работы механизма.
фиг.г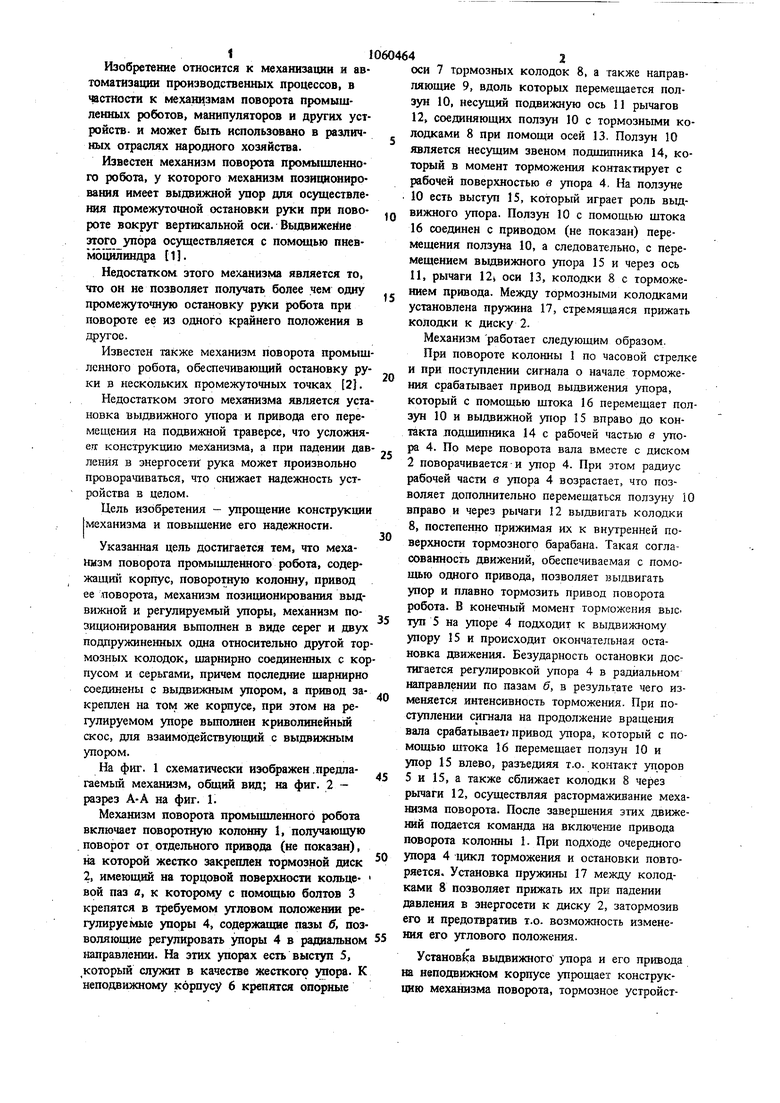
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота промышленного робота | 1983 |
|
SU1119839A1 |
| Манипулятор | 1985 |
|
SU1276485A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| Механическая рука робота | 1985 |
|
SU1289678A1 |
| Манипулятор для транспортировки спутников | 1986 |
|
SU1419882A1 |
| Механизм позиционирования робота | 1985 |
|
SU1266729A1 |
| Механизм позиционирования робота | 1983 |
|
SU1123774A1 |
| УСТРОЙСТВО РАЗМАТЫВАНИЯ И ПРОТЯГИВАНИЯ РУЛОННОГО МАТЕРИАЛА | 2022 |
|
RU2790182C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ ИЗ СТОПЫ | 2001 |
|
RU2209534C2 |
МЕХАНИЗМ ПОВОЮТА РУКИ ПРОМЫШЛЕННОГО РОБОТА, содержащий корпус. Фи.1 поворотную колонну, привод ее поворота, механизм позиционирования, выдвижной и регулируемый упоры, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, механизм позиционирования вьшолнен в виде серег и двух подпружиненных одна относительно другой тормозных колодок, шарнирно соедийенных с корпусом и серьгами, причем последние шарнирно соединены с выдвижным упорюм, а привод закреплен на том же корпусе, при зтом на регулируемом упоре выполнен криволинейный скос, взаимодействующий с выдвижным упором. 3 11
| Ь Белянин П | |||
| Н | |||
| Промышленные роботы | |||
| М., Машиностроение, 1975, с | |||
| Деревянное стыковое устройство | 1920 |
|
SU163A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 755550, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
