1
Изобретение относится к машиностроению, а именно к манипуляторам для механизации вспомогательных операций на машиностроительных предприятиях при штамповке, механической обработке, литье под давлением, сборке и т.д.
Известен манипулятор, предназначеннЩ для механизации вспомогательных операций технологических процессов машиностроительного производства, в котором механическая рука имеет возможность останавливаться в нескольких точках l .
Однако указанный манипулятор сложен по конструкции вследствие громоздкого привода и устройств его управления,
Наиболее близким к предлагаемому является манипулятор, в котором содержится механическая рука с приводом продольного перемещения в виде силового цилиндра, связанного с демпферами, регулируемые и вьздвижной упоры 2.
Недостаток указанного манипулятора заключается в том, что обеспечение остановки в нескольких заданных точ.;Ках усложняет конструкиию.
Цель изобретения - упрощение конструкции .
Указанная цель достигается тем, что рука снабжена подпружиненной рейкой, установленной с возможностью перемещения параллельно цилиндру и соединенной с демпферами, и штангой, один конец которой соединен со штоком силового цилиндра, второй - выдвижным упором, а регулируемые упоры смонтированы на этой рейке.
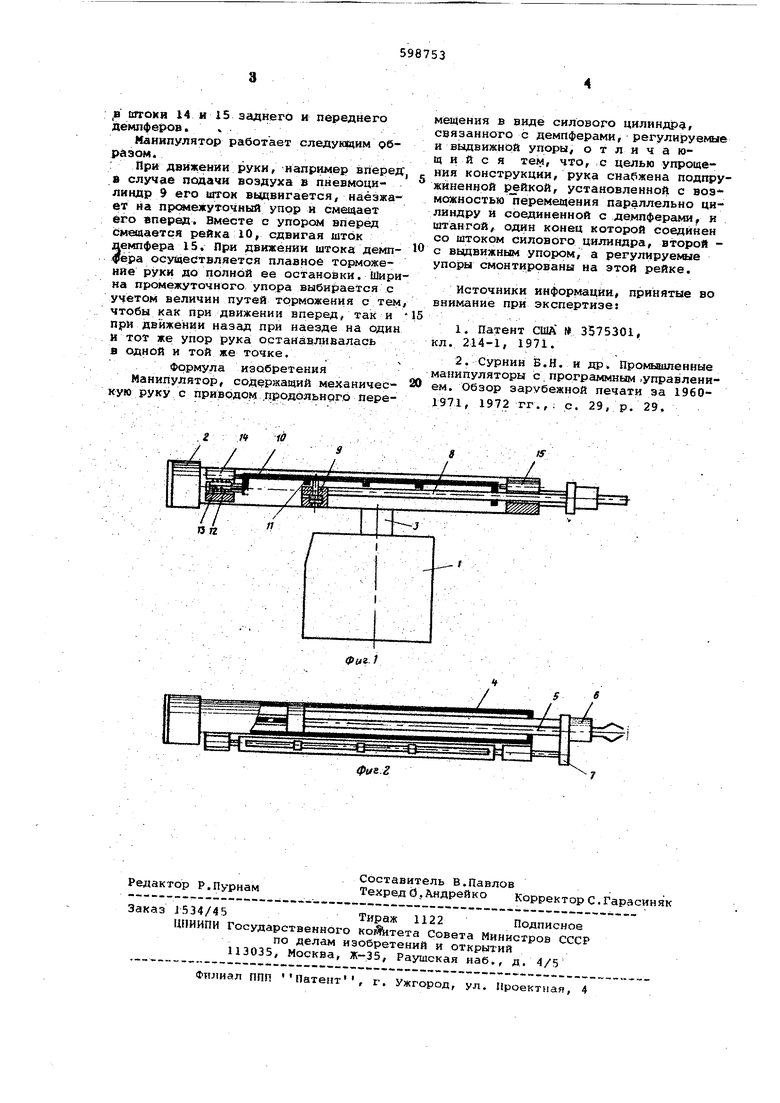
На фиг. 1 изображен манипулятор, продольный разрез; на фиг. 2 - то же, вид в плане.
Манипулятор содержит корпус 1 и механическую руку 2, установленную на валу 3. Рука содержит силовой цилиндр, например пневмоцилиндр 4, шток 5 которого является подвижным элементом руки. На конце штока 5 установлена кисть б с механизмом схвата. На том же конце.штока установлен фланец 7, к которому прикреплена штанга 8. На противоположном конце штанги установлен корпус пневмоцилиндра 9 выдвижного упора. Над штангой в направляющих (на чертеже не показаны) установлена рейка 10, подвижная в продольном направлении. В прорези рейки 10 вставлены передвижные упоры 11, которые фиксируются на рейке с помощью болтов. С помощью пружины 12, навитой на штоке 13, рейка 10 удерживается в среднем положении. Концы рейки 10 упира тс;я в штоки 14 и 15 заднего и переднего демпферов. . Манипулятор работает следующим обрдэом. При движении руки, например вперед а случае подачи воздуха в пневмоцилнндр его шток выдвигается, наезжает на прсжежуточный упор и смещает его «перед. Вместе с упором вперед смешается рейка iO, сдвигая шток демпфера 15. При движении штока демпфера осушейтвляется плавное торможение рУки до полной ее остановки. Шири на промежуточного упора выбирается с учетом величин путей торможения с тем чтобы как при движении вперед, так и при движении назад при наезде на один и тот же упор рука останавливалась в одной и той же точке. Формула изобретения Манипулятор, содержащий механическу руку с приводом .продольного переIf
/ мещения в виде силового цилиндра, связанного с демпферами, регулируемые и ВЫДВИЖНОЙ упоры, отличающийся тем, что, с целью упрощения конструкции, рука снабжена подпружиненной рейкой, установленной с воэмощностью перемещения параллельно цилиндру и соединенной с демпферами, и щтангой, один конец которой соединен со штоком силового цилиндра, второй с вьщвижным упором, а регулируелеле упоры смонтиррваны на этой рейке. Источники информации, принятые во внимание при экспертизе; 1.Патент США 3575301, кл. 214-1, 1971. 2.Сурнин 5.Н. и др. Промышленные манипуляторы с.программным .управлением. Обзор зарубежной печати за 19601971, 1972 гг., с. 29, р. 29,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1977 |
|
SU611773A1 |
| Захват | 1977 |
|
SU667396A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Манипулятор | 1985 |
|
SU1276485A1 |
| Манипулятор | 1977 |
|
SU611774A1 |
| Манипулятор | 1979 |
|
SU795938A2 |
| Манипулятор | 1979 |
|
SU770781A1 |
| Манипулятор | 1974 |
|
SU503713A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
