Изобретение относится к промьпл тенному транспорту, а именно к напольным тележечным конвейерам.
Целью изобретения является расширение технологических возможностей тележечного конвейера путем обеспечения различного по времени останова тележек.
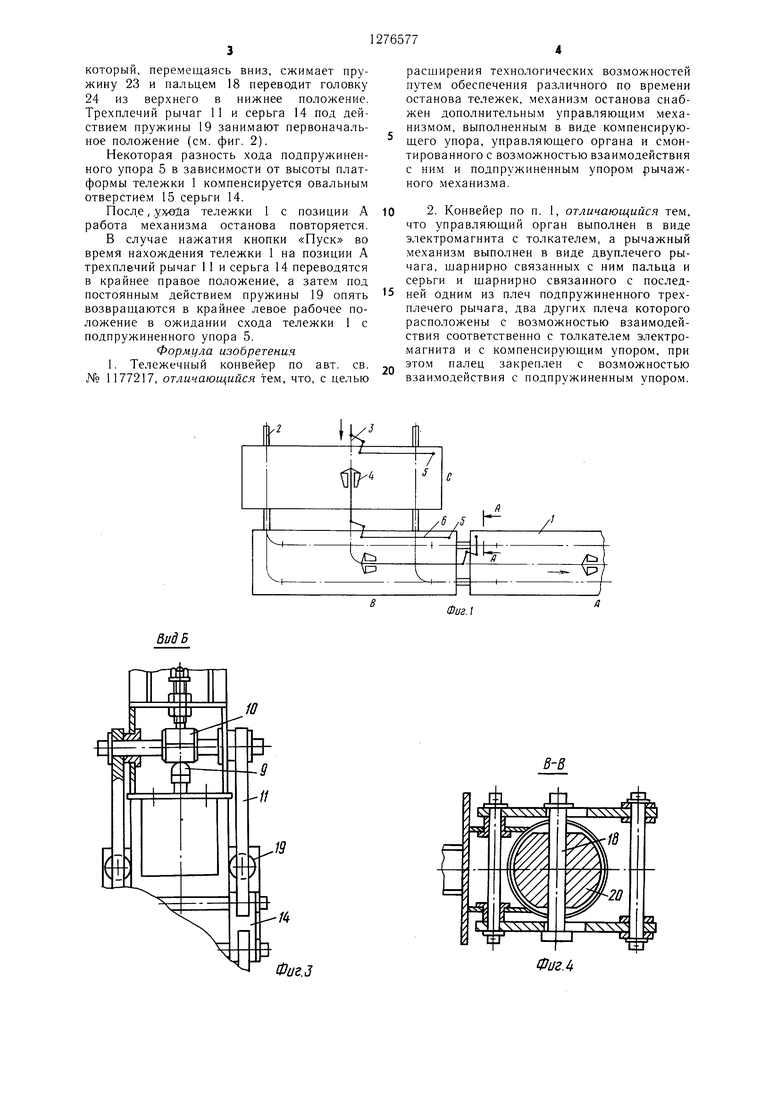
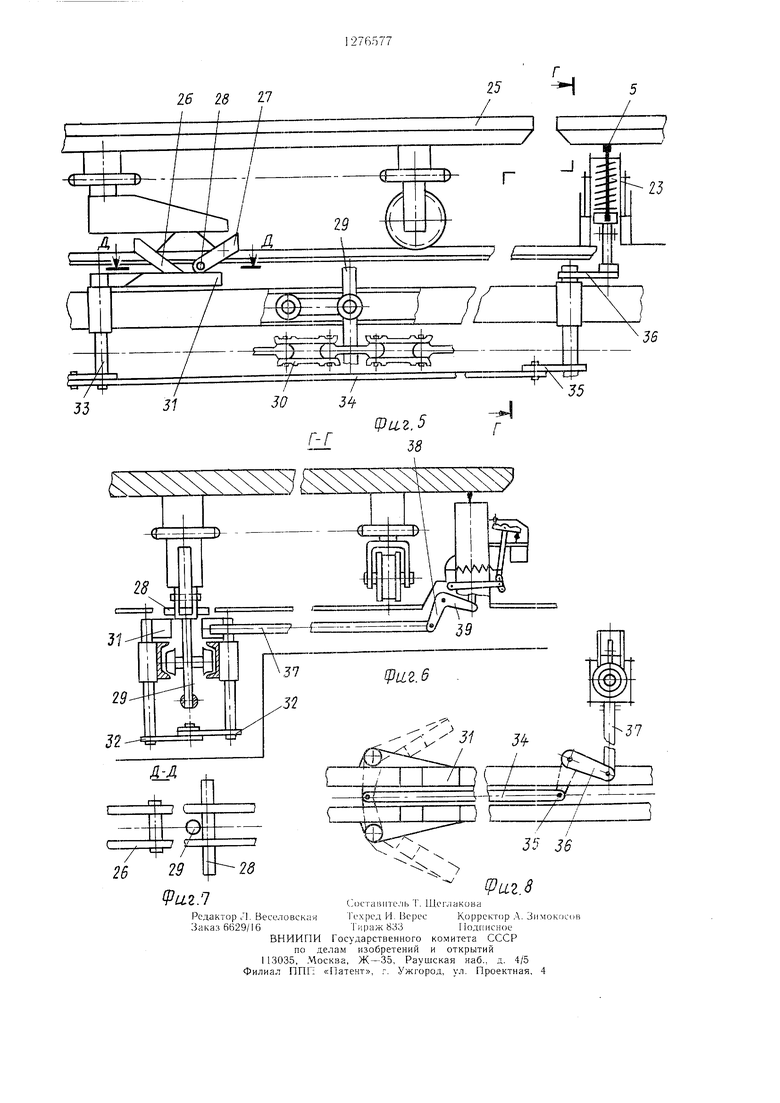
На фиг. 1 изображен тележечный конвейер, общий вид; на фиг. 2 - вид А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. 4 - сечение В - В на фиг. 2; на фиг. 5 - тележка при движении вдоль трассы конвейера; на фиг. 6 - вид Г-Г иа фиг. 5; на фиг. 7 - сечение Д-Д (толкатель изображен условно) на фиг. 5; на фиг. 8 - механизм останова, вид сверху. Тележечный конвейер включает тележки 1 с платформами, двигающиеся по направляющим 2 под действием тягового органа 3, и механизмы 4 останова с приспособлениями управления ими. Каждое приспособление управления механизмом останова.вы полнено в виде поворотного подпружиненного упора 5, установленного с возможностью взаимодействия с предыдущей по ходу движения тележкой 1 и связанного с механизмом 4 останова посредством тяговорычажной системы 6. Каждый механизм останова имеет дополнительный управляющий механизм, выполненный в виде компенсирующего упора 7 и управляющего органа, состоящего из электромагнита 8 и толкателя 9, которые расположены так, что одно плечо 10 трехплечего рычага 11 контактирует с толкателем 9, другое плечо 12 рычага 11 прижато к компенсирующему упору 7, а третье плечо 13 щарнирно соединено с серьгой 14, которая, в свою очередь, через овальное отверстие 15 иарнирно связана с щарнирно установленным двуплечим рычагом 16, имеющ,им овальное отверстие 17 для размепления в нем пальца 18. Трехплечий рычаг 11 подпружинен пружиной 19, а палец 18 установлен в цилиндрической части 20, имеющей сквозное овальное отверстие 21. Подпружиненный упор 5 имеет стержень 22, жестко соединенный с цилиндрической частью 20, пружину 23 и головку 24.
По направляющим 2 перемещаются предпочтительно протяженные тележки 1 с платформами 25, водило которых выполнено в виде поворотных в вертикальной плоскости упоров 26 и 27. Упор 27 имеет жестко закрепленный палец 28, взаимодействующий с толкателем 29. закрепленным на тяговой цепи 30.
Механизм 4 останова выполнен в виде опор 31 с рЕячагами 32, жестко закрепленными на вертикальных валах 33. Рычаги 32 связаны с приспособлением управления механизмом останова через тягово-рычажную систему 6, выполненную в виде тяги 34, соединенной шарнирно с нижним плечом 35 горизонтально установленного пространственного двуплечего рычага с вертикальной осью, верхнее плечо 36 которого соединено дополнительной тягой 37 с плечом
38вертикального двуплечего рычага, плечо
39которого связано с подпружиненным упором 5, подпружиненным пружиной 23.
Рычажный механизм выполнен в виде двуплечего рычага 16, щарнирно связанных с ним пальца 18 и серьги 14 и щарнирно связанного с последней одним из плеч подпружиненного трехплечего рычага 11, два других плеча 10 и 12 которого расположены с возможностью взаимодействия с подпружиненным упором 5.
Рабочее положение дополнительного управляющего механизма показано на фиг. 2. Головка 24 подпружиненного упора 5 с цилиндрической частью 20 и пальцем 18 находится в нижнем положении. Пружина 23 сжата. Под действием пружины 19 плечо 13 трехплечего рычага 1 1 переведено в крайнее левое положение, а плечи 12 и 10 рычага 11 прижаты соответственно к упору и к компенсирующему толка1елю 9.
Как только тележка 1 сходит с подпружиненного упора 5, сила распрямляющейся пружины 23 воздействует через палец 18, двуплечий рычаг 16, серьгу 14 и плечи 13 и 12 на компенсируюш,ий упор 7. При этом сила, направленная вдоль продольной оси серьги 14, проходит слева от оси вращения трехплечего рычага 11 и, стремясь повернуть его по часовой стрелке, прижимает плечо 12 к компенсируюигему упору 7, который лищает плечи трехплечего рычага 11 какого-либо перемещения и тем самым фиксирует положение всех элементов, например двуплечего рычага 16, пальца 18, а следовательно, и подпружиненного упора 5, в крайнем нижнем положении, что имитирует наличие тележки 1 на позиции А. Следовательно, тележка 1 с позиции В не уйдет до тех пор, пока не будет получена дополнительная команда, напри.мер, от электромагнита 8.
Предположим, что сборочная операция на позиции В закончилась.
Путем нажатия, например, кнопки «Пуск включают электромагнит 8. Толкатель 9 электромагнита 8, перемещаясь и растягивая пружину 19, переводит, воздействуя на плечо 10, плечо 13 трехплечего рыча1а 11, последний в положение, при котором сила распрямляюц.1.ейся пружины 19, проходящая через продольную ось серьги 14, проходит справа от оси вращения трехплечего рычага 11. Двуплечий рычаг 16 получает возможность свободного перемещения в крайнее верхнее положение. Воздействуя на серьгу 14 и растягивая пружину 19, двуплечий рычаг 16 занимает крайнее верхнее положение, а плечо 13 трехплечего рычага 11 - крайнее правое (показано тонкими линиями) положение.
При переходе тележки 1 с позиции В на позицию А ее платформа (не показана) вновь нажимает на подпружиненный упор 5. который, перемешаясь вниз, сжимает пружину 23 и пальцем 18 переводит головку 24 из верхнего в нижнее положение. Трехплечий рычаг 11 и серьга 14 под действием пружины 19 занимают первоначальное положение (см. фиг. 2). Некоторая разность хода подпружиненного упора 5 в зависимости от высоты платформы тележки 1 компенсируется овальным отверстием 15 серьги 14. Посл.е, .ухвЛа тележки 1 с позиции А работа механизма останова повторяется. В случае нажатия кнопки «Пуск во время нахождения тележки 1 на позиции А трехплечий рычаг 1 1 и серьга 14 переводятся в крайнее правое положение, а затем под постоянным действием пружины 19 опять возвращаются в крайнее левое рабочее положение в ожидании схода тележки 1 с подпружиненного упора 5. Формула изобретения 1. Тележечный конвейер по авт. св. № 1177217, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения различного по времени останова тележек, механизм останова снабжен дополнительным управляющим механизмом, выполненным в виде компенсирующего упора, управляющего органа и смонтированного с возможностью взаимодействия с ним и подпружиненным упором рычажного механизма. 2. Конвейер по п. 1, отличающийся тем, что управляющий орган выполнен в виде электромагнита с толкателем, а рычажный механизм выполнен в виде двуплечего рычага, шарнирно связанных с ним пальца и серьги и шарнирно связанного с последней одним из плеч подпружиненного трехплечего рычага, два других плеча которого расположены с возможностью взаимодействия соответственно с толкателем электромагнита и с компенсирующим упором, при этом палец закреплен с возможностью взаимодействия с подпружиненным упором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| ОСТАНОВ ДЛЯ ГРУЗОВЫХ ТЕЛЕЖЕК ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА | 1970 |
|
SU285611A1 |
| Напольный тележечный конвейер | 1982 |
|
SU1022884A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| Устройство для подачи и отбраковки упакованных предметов | 1987 |
|
SU1502421A1 |
| Останов подвесного толкающего конвейера | 1984 |
|
SU1276591A1 |
| Тележечный конвейер | 1979 |
|
SU870273A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |
| Тележечный конвейер | 1986 |
|
SU1368233A1 |
Изобретение относится к промьпиленг пому транспорту и позволяет повысить технологические во.зможности конвейера путем обеспечения различного по времени остаиова тележек. Для этого механиз.м останова тележек с приспособлениями управления ими снабжен дополнительным управляющим мехапизмо.м, содержащим компенсируюи1,ий упор 7, управляющий орган и рычажный механизм. Управляющий орган вьщолнен в виде электромагнита (Э) 8с толкателем 9. Рычажный механизм выполнен в виде двуплечего рычага 16, шарнирно связанных с ним пальца и серьги 14 и подпружиненного трехплечего рычага (ТР) 11. Плечо 10 ТР 1 1 п)арнирно связано с серьгой 14, а плечи 12 и 13 взаи.модействуют соответственно с толкателем 9 и упором 7. Палец взаимодействует с подпружиненным упором (ПУ) 5 приспособления управления тележками. При сходе тележки с ПУ 5 сила пружины воздействует через палец, рычаг 16, серьгу 14 и плечи 12, 13 на упор 7. Он лишает плечи ТР 1 1 какого-либо перемещения и фиксирует положение всех элементов. По окончании сборочной операции включает Э 8. Толкатель 9 Э 8, воздействуя на ТР 11, свободно перемещает рычаг 16 в крайнее верх нее положение. При переходе тележки на сл другую позицию она вновь нажимает на ПУ 5, переводя систему в первоначальное положение. 1 з.п. ф-лы, 8 ил.
В-8
Фиг 4
| Тележечный конвейер | 1983 |
|
SU1177217A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
