нера с загрузочной позиции линии на конвейер и первому входу соответствутощего узла переадресации, второй блокировочный контакт каждого шлагбаума подключен к входу вычитания ре версивного счетчика предыдущей (стар тей) линии и к первому входу элемента ИЛИ соответствующей линииj выход элемента ИЛИ соединен с входом .сложения реверсивного счетчика соответствующей линии, выход которого соединен с вторым входом узла переадресации последующей {младшей)линии, выход реверсивного счетчика первой линии подключен к второму входу дополнительного узла переадресации, третий блокировочный контакт каждого шлагбаума подключен к второмзг входу элемента ИЛИ и к третьему вхо ду узла переадресации соответствующей линии, первый выход каждого бло ка переадресации подключен к соответствующей ячейке памяти непосредственно, а второй - через задатчик параметров конвейера, выход последней ячейки памяти подключен к второму вход у,ключа блока управления роботом. 2. Устройство по п. 1, о т л ичающееся тем, что, с целью уменьщения количества датчиков с неравновеликими зонами чувствитель ности, использованы контейнеры с чашеобразным поддоном, линейные раз меры зон чувствительности, их взаимное расположение связаны с размерами поддонов соотношением D+2,, D-d+l,, 94 где I, ширина (толщина)шлагбаума; размер (длина) зоны чувстIвительности датчика; расстояние между зонами чувствительности датчиков; размер зоны нечувствительности датчика; диаметр дна поддона контейнера;диаметр чаши поддона контейнера . 3. Устройство по п, I, о т л и чающееся тем, что управляющий блок выполнен на четырех элементах И, трех инверторах и ключе, при этом выход первого инвертора соединен с первым входом первого элемента И, выход второго инвертора - с первым входом второго и третьего элементов И, выход третьего инвертора - с вторым входом второго элемента И, первым входом ключа и первым входом четвертого элемента И, второй вход которого объединен с вторым входом первого элемента И и является третьим входом блока,вход первого инвертора объединен с вторым входом ключа и является вторым входом блока, третий вход четвертого элемента И является четвертью входом блока, выходы первого и второго элементов И объединены и являются первым выходом блока, выходы третьего и четвертого элемен тов И объединены и являются вторым выходом блока, а выход ключа является третьим выходом блока.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| Система управления гальваническим производством | 1986 |
|
SU1425604A1 |
| Система управления гибким производственным комплексом | 1987 |
|
SU1513417A1 |
| Система управления гальваническим производством | 1983 |
|
SU1140097A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для счета предметов,переносимых конвейером | 1982 |
|
SU1072076A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1383298A1 |
| Устройство для программного управления группой объектов | 1981 |
|
SU1022115A1 |
| Устройство для передачи информации при учете перемещающихся изделий | 1976 |
|
SU616647A1 |
| Устройство телемеханики для сосредоточенных объектов | 1975 |
|
SU532878A1 |
1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ ОТ АВТОМАТИЧЕСКИХ ЛИНИЙ НА СТАЦИОНАРНЫЙ СКЛАД, содержащее промежуточный подвижной секционный склад, задатчики параметров контейнера, датчики наличия контейнера на загрузочной позиции линии, приводные механизмы передачи контейнера на промежуточный склад, приводные механизмы шлагбаума и управляющие блоки по числу автоматических линий, при этом каждый задатчик параметров контейнера соединен с соответствующей ячейкой памяти секционного склада линии, а первый выход каждого управляющего блока -с соответствующим приводным механизмом шлагбаума, блок управления роботом, включающий узел сравнения, ключ, дополнительный узел переадресации и п ячеек, каждая из которых содержит узел переадресации и, кроме последней, реверсивный счетчик, элемент ИЛИ и ячейки памяти, Причем выход узла сравнения подключен к исполнительным механизмам перемещения робота, отличающееся тем, что, с целью упрощения устройства за счет использования одного робота на все или несколько линий, устройство снабжено датчиком наличия контейнера на разгрузочной позиции подвижного склада и инвертором, а также по крайней мере на каждую линию без одной двумя датчиками с неравновеликими зонами чувствительности, каждый шлаг-баум снабжен блокировочными контактами, в качестве подвижного склада использован конвейер с дожатием запаса контейнеров до зоны выгрузки с в каждой секции, а в блок управле ния роботом введен дополнительный (Л узел переадресации, при этом датчик наличия контейнера на разгрузочной позиции конвейера соединен с дополнительным узлом переадресации блока управления роботом непосредственно и через инвертор - с входом вычитания реверсивного счетчика первой линии, первым входом ключа блока управления роботом, второй вход которого соединен с ячейкой памяти, а выход ключа - с первым входом уз35 ла сравнения, второй вход которого СД соединен с ячейками памяти стациоСО нарного склада, выходы каждого датчи4: ка с неравновеликими зонами чувствительности, датчика регистрации наличия контейнера на загрузочной позиции линии и первый блокировочный контакт шлагбаума соединены с первьм, вторым, третьим и четвертьм входами соответствующего управляющего блока, второй и третий выходы которого подключены к соответствующему приводному механизму передачи контей
Изобретение относится к кабельной промышленности, в частности к устройствам для транспортировки контейнеров с кабельными жилами разньпс типов от автоматических линий по производству этих жил к стационарному складу, из которого эти жилы поступают на последующ то технологическую операцию.
Целью изобретения является упрощение устройства за счет использования одного робота на все или несколько линий.
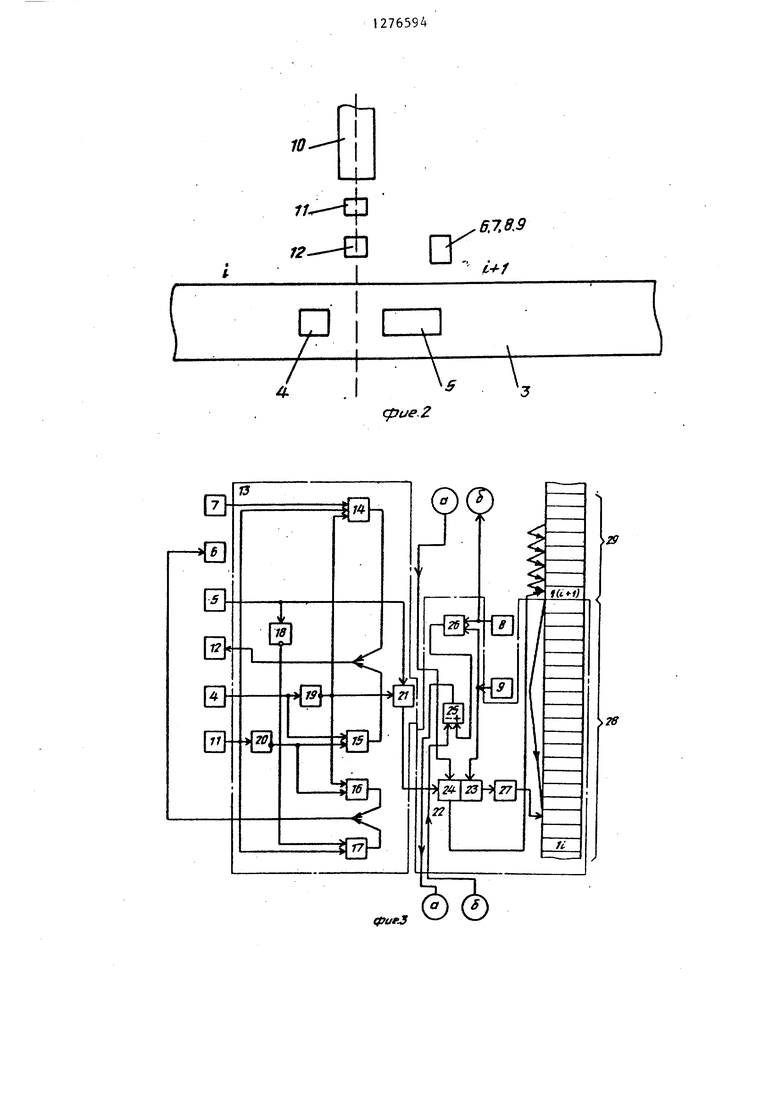
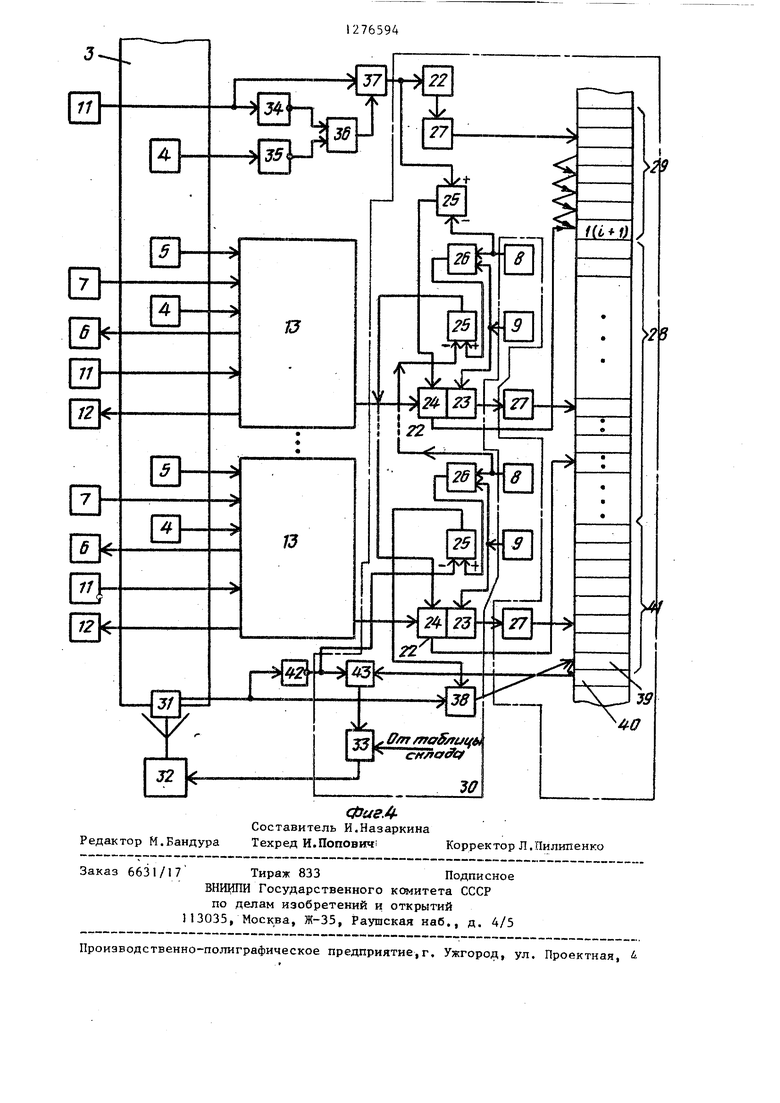
На фиг. 1 показано возможное взаимное расположение контейнеров, движущихся по конвейеру в направлении стрелки UV на $)иг. 2 - взаимное пространственное расположение отдельных 3 узлов устройства участка конвейера в зоне одной (i-й) автоматической л нии} на фиг. 3 - блок-схема управля ющего блока одной (1-й) секции и ег связь с внешними узлами устройства на фиг. А - общая блок-схема управления предложенного устройства. Устройство для перемещения контейнеров 1 с телефонной изолированной жилрй 2 (фиг. I) содержит промежуточный секционный склад в виде конвейера 3, перемещающего указанны контейнеры в направлении стрелки U систему из двух датчиков 4 и 5 с не равновеликими зонами чувствительнос ти, регистрирующих прохождение контейнеров по -конвейеру, шлагбаум 6, содержащий блокировочные контакты 7, 8, 9 и имеющий ширину (толщину) I,. Контейнеры выполнены в виде чашеобразных поддонов с размерами D (чаши) и d (дна). Кроме того (фиг. 2), у каждой ав матической линии 1 О предусмотрен датчик 1I, регистрирующий наличие койтейнерана загрузочной позиции линии, приводной исполнительньй механизм 12 передачи; контейнера с за грузочной позиции линии на конвейер 3. Конвейер в зоне i-й автоматичес кой линии условно можно разделить н i и i+1 секции, причем датчик 4с меньшей длиной зоны чувствительности расположен на участке i-й секции а датчик 5 с большей длиной зоны чувствительности расположен на 1+1 секции. Линейные размеры зон чувствитель ности системы датчиков 4, 5, их вза имное расположение связаны с размерами поддонов соотношением l.D-d, D+l,l,+I,+l4. D-d+l,, где I, - -ширина (толщина) шлагбаума;1 - размер (длина) зоны чувствительности датчика 4; 2j - расстояние между зонами чувствительности датчикогв 4 и 5; 1 - размер (длина) зоны нечувствительности датчика 5; D - диаметр чаши поддона контейнера;d - диаметр дна поддона контей нера. 94 Датчики 4 и 5 могут быть как контактного типа (в виде пластин), так и бесконтактного (например, емкостные ). Блок-схема управляющего блока i-й секции приведена на фиг. 3. В состав управляющего блока 13 входят элементы 14-17 совпадения И, инверторы 18, 19, 20 и ключ 21. На фиг. 3 изображены также не относящиеся к управляющему блоку дополнительно узел 22 переадресации, состоящий из двух секций 23 и 24, реверсивный счетчик 25, элемент 26 ИЛИ, ячейка 27 памяти и ячейка 28 памяти. Ячейки 29 памяти относятся к i+1 секции подвижного склада. Как показано на фиг. 4 в состав предложенного устройства входят управляющие блоки 13 по числу автоматических линий, блок 30 управления роботом с соответствующими блоками (указанными вьш1е), датчик 31 наличия контейнера на разгрузочной позиции конвейера, робот 32, узел 33 сравнения. Управляющий блок для п-й линии может быть таким же или упрощенным и содержать инверторы 34, 35, элемент 36 совпадения И, ключ 37. Кроме того, блок 30 дополнительно содержлт блок 38 переадресации, ячейки 39, 40 памяти и ячейки 41 памяти стационарного склада, инвертор 42 и ключ 43. Конвейер вьтолнен роликовым с дожатием запаса контейнеров до зоны выгрузки в каждой секции. Поэтому,.когда шлагбаум выдвинут и препятствует-движению контейнеров, контейнер, соприкасаясь со шлагбаумом, останавливается, а ролики конвейера прокручиваются. Аналогично останавливаются и все контейнеры, следующие за этим контейнером, не только после того, как они вплотную приблизятся к первому. Таким образом осуществляется дожатие запаса контейнеров до зоны выгрузки в каждой секции, т.е. до шлагбаума, как бы разделяющего общую ленту конвейера на отдельные участки (секции). Массив памяти УВМ также разбит на участки (секции). При этом установлено строгое соответствие между массивами памяти каждой секции и соответствующим участком (секцией) конвейера, т.е. участку конвейера между i+1 и 1-й автоматическими ли$
ниями отводится в памяти УВМ массив под номером i (), где i - номер автоматической линии.
Устройство работает следующим образом.
Приемное устройство автоматической линии, включакяцее и контейнер, обеспечивает прием в контейнер 1 телефонной жилы 2 (см. фиг. 1). Предварительно устройством подготовки данных (не показанным), например, с дисплея или пульта управления оператора автоматической линии формируется паспорт контейнера, где указываются различные параметры, производимые данной -автоматической линией, например диаметр токопроводящей жилы, тип изоляции и, в частности, цвет изоляции, которые постоянно хранятся в ячейке 27 памяти блока 30, это задатчик параметров контейнера,заполняемого жилой, производной автоматической линией. Очевидно, число ячеек 27 соответствует числу линий. Как только контейнер на выходе автоматической линии наполнится, приемным устройством линии он сдвигается в сторону конвейера 3, что фиксируется датчиком 11 (фиг. 2), Этим самым определяется готовность контейнера к выходу на конвейер. Однако его окончательному выходу в данном случае препятствует приводной исполнительный механизм 12. Выход контейнера на конвейер и срабатывание механизма 12 обеспечивается выходным сигналом элемента
14 И {см. фиг. 3), которьй появится в том случае, когда есть сигналы с датчика П (контейнер готов к выходу), свободен датчик 4 (сигнал О через инвертор 19 преобразуется в 1) и шлагбаум 6 перекрыл движение сзади идущих по конвейеру контейнеров, т.е. блок-контакты 7 сработали и подали 1 на вход элемента 1 4 И.
Сигнал с выхода элемента 17 И, который вырабатьгоается при условии, если свободен датчик 5 (сигнал 1 на выходе инвертора 18) и контейнер готов к выходу, воздействует на приводной механизм шлагбаума 6, в результате чего шлагбаум закрывается,
В основу такой логики положена идея приоритета выхода контейнера, стоящего на загрузочной позиции линии, по сравнению с контейнерами, поступающими на этот участок со сто76594«
роны старшей секции, за .исключением тех случаев, когда контейнеры, поступающие со старшей секции, движутся непрерывным потоком. В этом слу5 чае контейнер на загрузочной позиции будет задержан.до того момента, пока между контейнерами образуется зазор, который позволяет выдвинуться шлагбауму. Как показал опыт, такая ло10 гика обеспечивает максимальную пропускную способность конвейера при малых задержках контейнеров на загрузочной позиции линии, в том числе и для первой линии. В частности,при
15 числе линий, равном восьми, задержка контейнера на загрузочной Позиции не превьшала 25% времени его наполнения на линии (время наполнения 12-15 мин).
20 Использование контейнеров с чашеобразньм поддоном и датчиков 4 и 5 длины зон чувствительности, взаимное расположение которых соответствует указанным вьше, обеспечило выпол25 некие логики работы всего лишь двумя указанными датчиками, расположенными в зоне автоматической линии. После того, как контейнер сойдет с датчика II (сигнал 1 на выходе ин30 вертора 20), но еще не сошел с датчика 4, формируется сигнал на выходе элемента И 15, который возвращает исполнительный механизм 12 в исходное состояние.
Отсутствие сигнала ; с датчика 11 и после того как контейнер пройдет датчик 4, используя инверторы 19, 20, формируется сигнал на выходе элемента И 16, который воздействует на привод механизма шлагбаума 6, возвращая его в исходное положение (открытое). .
Таким образом, при возникновении ., требуемого зазора между контейнерами датчики 4 и 5 будут свободньпчи и
,при наличии контейнера на загрузочной позиции линии он без задержки поступает на конвейер. Когда датчик 5 нажат, то ключ 21 (например,триггер, см. фиг. З) устанавливается в единичное состояние. Этим самым обеспечивается подготовка к работе блока 22 переадресации. Работа блока 22 начинается после прихода управляющего инициативного сигнала, который появляется на выходе ключа 21, когда контейнер пройдет датчик 4 (сигнал 1 на выходе инвертора 19) Этим же сигналом ключ 21 устанавли вается в исходное (нулевое) состояние. После прихода инициативного сигнала и в зависимости от положения шлагбаума вступает в работу секция 23 или 24 блока 22 переадресации. Если шлагбаум закрыт, то его блокконтакт 9 запускает в работу секцию 23 узла:22 и одновременно через эле мент 26 ИЛИ увеличивает содержимое реверсивного счетчика 25 своей секции на единицу, и, таким образом, регистрирует количество контейнеров в ячейке 28 своей секции памяти, с Результатом работы секции 23 уз ла 22 является занесение (запись) м содержимого ячейки 27 в последнюю от начала (в данном случае от низа) свободную ячейку 28 массива- ( I i первая ячейка массива i ). Если шлагбаум открыт (исходное состояние), то его блок-контакт В воздействует на вычитающий вход реверсивного счетчика 25 (выход S см. фиг. 3) соседней (1+1)-й старшей се ции склада (см, фиг.Д), а через эле мент 26 ИЛИ на вход сложения счетчи ка 25 своей i-и секции, в первом сл чае уменьшая, а во втором случае ув личивая содержимое счетчиков на еди ницу. Под воздействием выходного сигнала со счетчика 25, входящегр в i+ секцию (см, фиг. 4 или вход а см. фиг. 3), вступает в работу секция 2 узла 22, принадлежащего i-й секции подвижного склгда. В задачу данной секции входит переадресовка содержимого головной (первой) l(i+l) ячейки.массива памяти соседней старшей ячейки 29 склад в последнюю от начала ячейку 28 массива. Одновременно секция 24 последовательно переадресовывает (переписывает ) содержимое массива старшей секции 29 таким образом, что содержимое второй ячейки пересылается в первую (головную), третьей - во вторую и т.д. Количество таких пересылок будет определяться содержимым счетчика 25, соседней старшей (1+1)секции и после окончания пересылок очередь в ячейке 29 памяти как бы сдвигается вперед на единицу. Далее узел 22 и его секции 23 и 24,а также счетчик 25, элемент 26 ИЛИ реализует ся в предложенном устройстве програм мно с помощью блока 30. Например, 5948 командой iNC Di увеличивается на единицу содержимое ячейки памяти блока 30. Ячейка Di эквивалентна по своему назначению работе счетчика 25 данной (i-й) секции участка конвейера. Командой DEC Di+й уменьшается на единицу содержимое ячейки Di + l, памяти блока 30, Ячейка Di+1 эквивалентна по своему назначению работе счетчика 25 соседней (i+l)-й старшей секции. Функция элемента 26 ИЛИ заменяется командой BiC. Работа секций 23 и 24 узла 22 переадресовки реализуется с помощью специально написанных программ, для чего используются команды: MOV - переслать СМР - сравнить} TST - опросить и вьщ1еуказанные команды. Блок 30 управления роботом работает в режиме прерьшаний, т.е. программы начинают работать только с момента поступления внешних инициативных сигналов. Поэтому, выход ключа 2}, блок-контакты В и 9 шлагбаума подключены к соответствующим входам блока 30, а программа обработки прерывания определяет на какой именно вход пришел внешний инициативный сигнал (так называемый сигнал прерывания) и формирует ответную реакцию в виде выполнения отдельных команд либо цельк подпрограмм (для выполнения функций элементов 23 и 24 предложенного устройства). Управляющий блок, относящийся к п-й автоматической линии, может быть как и i-1 (). Однако, учитывая, что в данном случае отсутствует необходимость в датчике 5, механизмах 6, 7 и 12, он может быть упрощен, Узел 22 переадресовки в данном случае выполнен в виде одной секции. Этим блоком осуществляется только запись содержимого ячейки 27 в последнюю свободную ячейку своей (п-й) секции массива. После того, как движущийся по конвейеру контейнер достигнет разгрузочной позиции конвейера, срабатывает датчик 31 (см. фиг. 4) и данный инициативный сигнал поступает на первый вход узла ЗВ переадресации. По этому инициативному сигналу узел 38переадресации осуществляет только запись, содержимого первой ячейки 39ячеек 41 массива-памяти первой секции участка конвейера, т.е, ячейку 41 (первый элемент первой секции) в результирующую (разгрузочную) ячей ку АО. Когда робот 32 снимает контейнер с разгрузочной позиции конвейера, то инициативным сигналом 1 с кнвертора 42 откроется ключ 43.Вследствие этого содержимое результирующе ячейки 40 поступает на один вход узла 33 сравнения. Выход инвертора 42 действует и на вычитающий вход реверсивного счетчика 25 первой секции участка конвейера. Выход данного счетчика 25 воздействует на второй вход узла 38, в результате чего осуществляется последовательная переадресация на одну ячейку вперед содержимого ячеек 41 массива первой секции. Количество таких переадресовок равняется содержимому реверсивного счетчика 25 первой.секции. В узле 33 сравнения, который реализуется программой и на другой вход которого последовательно подключаются данные от таблицы памяти склада, осуществляется опознание содержимого результируняцей ячейки 40, и в результате чего с вы хода блока 30 дается однозначная команда исполнительным механизмом перемещения робота 32 к месту транс портировки взятого контейнера на по следующую технологическую операцию. При зтом предполагается, что среди параметров, определяющих тип жилы в контейнере, имеется и параметр, укасывающий место установки контейнера с данной жилой на маршруте перемещения робота к последующей технологической операции. Например, в предложенном устройстве это реализуется следующим обра зом. В мащинном слове блока 30 типа Электроника-60 среди 16 битов (ра рядов) три адтадших (0,1,2) кодируют конкретно цвет изоляции (так как цветов, предполагается не более 7). Далее 5 разрядов (3,4,5,6,7) кодируют допустимое количество контейнеров данного цвета на складе-накопителе, необходимых для хранения (т.е. не более 32). Предполагается, что робот отвозит полные контейнеры с телефонной жилой на склад-накопитель для питания следующей технологической операции по производству кабеля, например участок скрутки жил в пучок. Следующие восемь разрядов (8-15), так называемый старший байт слова, хранят место установки контейнера с данным цветом. Таким образом, в данном случае мест на складе-накопителе может быть не более 256. В узле 33 сравнения программно определяется цвет взятого роботом контейнера, т.е. анализируются три младщих,разряда, оценивается количество таких контейнеров на складенакопителе Допрашиваются разряды 3,4,5,6,7) машинного слова в таблице памяти (не показанной) УВМ, хранящей в себе всю картину на складенакопителе, и при наличии свободного места, опросом старщего байта, определяется конкретно номер места на складе-накопителе и выдаются команды исполнительным механизмам робота для перемещения и остановки его у данного места. Предложенное устройство позволяет полностью механизировать подачу контейнеров от автоматических линий на склад участка крутильных машин и, кроме того, определить паспортные данные контейнера, в том числе цвет и сечение жилы,, находящейся в нем.
//..-нф
.7.8,9
D.,
. .
срие.2
U
55
77
7/
)
25
2в
ф 4 /J-Ц, - 1
t
}
| Устройство для управления адаптив-НыМ РОбОТОМ | 1979 |
|
SU830304A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| фирма Nokia, Финляндия, 1979. | |||
