кали и снабженные маятниковыми устройствами 5, 6 и 7 для дискретного измерения угла отклонения датчика, аналого-цифровые преобразователи 8, 9 и 10 сигналов силоизмерительных датчиков, преобразователи 11, 12 и
13 сигналов, коммутатор J4, блок 15 умножения, сумматор 16, указательное цифровое табло 18, блок 17 управления, формирователь 19 запускающих импульсов, световые индикаторы 20, 21 и 22 и источник 23 питания, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Весы для заливочного крана | 1983 |
|
SU1117457A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2334955C1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |
| Весы для заливочного крана | 1986 |
|
SU1377600A2 |
| ВЕСЫ ДЛЯ ЗАЛИВОЧНОГО КРАНА | 2006 |
|
RU2306533C1 |
| Весы | 1990 |
|
SU1756772A1 |
| Устройство для взвешивания заготовок | 1991 |
|
SU1824524A1 |
| Устройство для поверки тензометрических весов | 1986 |
|
SU1415069A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU901837A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания грузов при переменном значении температуры окружающей среды либо грузов, температура которых различна. Погрешность силоизмерительных датчиков вызвана отклонением их от вертикали при действии горизонтальных усилий, возникающих при изменении размеров грузоприемного устройства. Компенсация погрешности каждого датчика достигается преобразованным сигналом маятникового датчика для дискретного измерения угла отклонения датчика от вертикали. Весовое устройство содержит грузоприемное устройство 1, силоизмерительные датчики 2,3 и 4, выполненные с возможностью отклонения их оси от вертикали и снабженные маятниковыми устройствами 5,6 и 7 для дискретного измерения угла отклонения датчика, аналого-цифровые преобразователи 8,9 и 10 сигналов силоизмерительных датчиков, преобразователи 11,12 и 13 сигналов, коммутатор 14, блок 15 умножения сумматор 16, указательное цифровое табло 17, блок 18 управления, формирователь 19 запускающих импульсов, световые индикаторы 20,21 и 22 и источник 23 питания. 2 ил.
Изобретение относится к весоизмерительной технике и может быть использовано в металлургической и других отраслях промышленности, где требуется измерение массы грузов при переменном значении температуры окружаюп1ей среды или измерение массы грузов, т температура которых различна.
Цель изобретения - повышение точности взвешивания
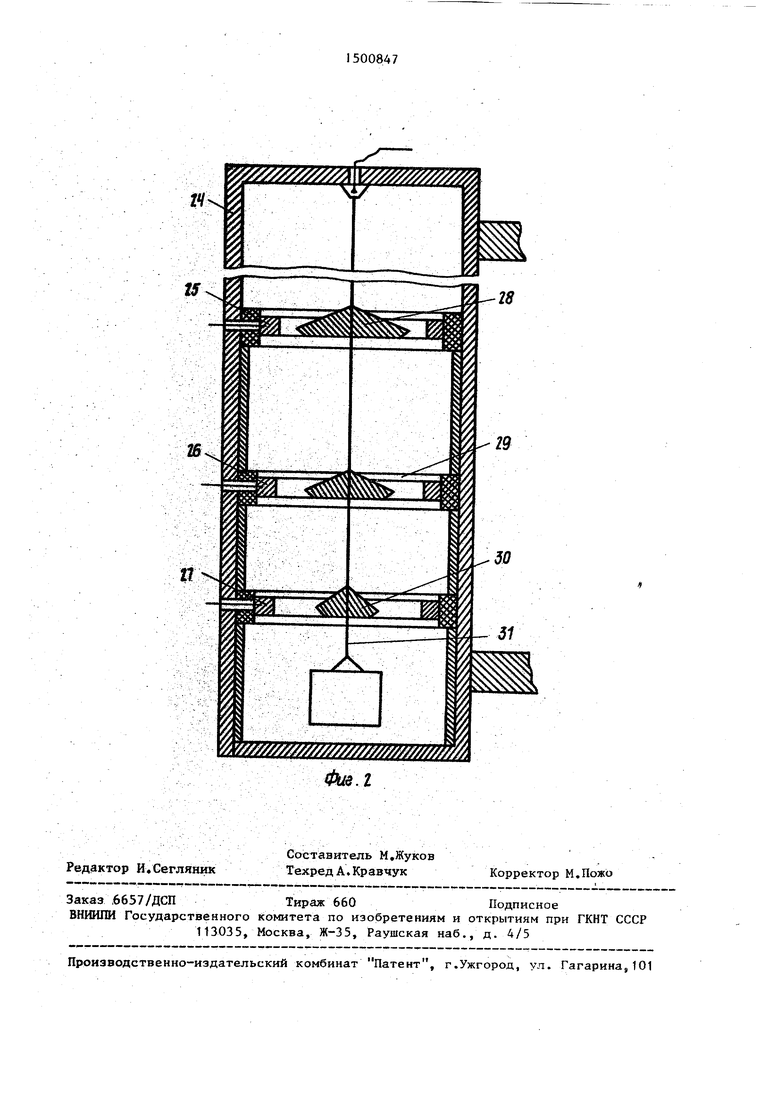
На фиг.1 изображена структурная схема устройства; на фиг.2 - маятниковые датчики угла отклонения от вер- тикали.
Устройство содержит грузоприемную платформу 1 или бункер, силоизмеритель ные датчики 2-4, маятниковые датчи- ки 5 - 7 угла отклонения от вертикали аналого-цифровые преобразователи (АЦП) 8 - 10, преобразователи сигналов 11 13, коммутатор 14, блок 15 умножения, сумматор 16, блок 17 управления, цифровое табло 18, формирователь 19 запул екающих импульсов, световые индикаторы 20 - 22 и источник питания 23,
Маятниковые датчики состоят из корпуса 24, кольцевых контактов 25 - 27, контактов 28 - 30 и токопроводящей нити 31.
Устройство работает следующим образом..
При взвешивании грузов с различной температурой или в случае изменения температуры окружающей среды грузо- приемная платформа 1 изменяет свои .размеры, в результате чего силоизме- рительные датчики 2, 3 и 4 отклоняются от вертикального положения. Механическое воздействие массы груза распопоженного на грузоприемной платформе I, преобразуется силоизмери- тельными датчиками 2, 3 и 4 в электрические аналоговые сигналы F, Fj и F, поступающие на входы АЦП 8 - 10. Изменение Точки приложения измеряемого усилия и искажения величины усилия, прикладываемого к снлоизмерительному
датчику под углом, равным углу отклонения .датчика от вертикали, вызывает дополнительную погрешность сигла- нов F, F и F. Преобразованные АЦП сигналы в цифровом коде F, F и поступают на входы коммутатора 14.
Одновременно с отклонением от вертикали силоизмерительных датчиков 2 - 4 на такой же угол, который может °быть различным для каждого силоизмери- тельНого датчика, отклоняются от вертикали маятниковые датчики 5 - 7 в которых кольцевые контакты 25, 26 и 27 в зависимости от величины угла отклонения от вертикали касаются контактов 28 - 30, расположеиньцс на токопроводящей нити 31 маятникового датчика, сохраняющей вертикальное положение. Электропитание подведено к нити 31 и к контактам 25 - 27, Замыкание 25 и 28, 26 и 29 или 27 и 30 включает соответствующие электрические цепи, подающие на входы преобразователей сигналов 11 - 13 командные сигналы F, Fg и Fy, соот 8етствующие величинам углов отклонения от вертикали каждаго сило- измерительного датчика. С выходов преобразователей 11, 12 и 13 сигналов сигналы с цифровом коде в виде коэффициентов FH , F и , пропорциональных погрешности измерения соответствующих силоизмерительных датчиков, поступают на отдельные входы.коммутатора 14. , -
Коммутатор 14 попарно коммутирует на входы блока умножения 15 сигналы Fg и F, , F, и FIO, F,o и F,3 . В блоке умножения 15 сигнал каждого датчика Fg, Fg и FIO умножается на соответствующий поправочный коэффициент F« , F и F;,-j , в результате чего, происходит компенсация погрешности сигналов силоизмерительных датчиков, вызванной отклонением их от вертикали.
Выход блока 15 умножения подключен ко входу сумматора 16, с выхода которого результирующий сигнал поступает
на вход цифрового табло 18, показьш ющего массу взвешиваемого груза.
Управление процессами коммутации сигналов, умножения, суммирования и индикации осуществляется по команда блока 17 управления и формирователя запускающих импульсов.
Блок управления 17 вырабатывает пять сдвинутых во времени управляющ сигналов cl,. , . - и .
Формирователь запускающих импуль 19 при поступлении сигналов , , C xj. и формирует импульс для запуска блока 15 умножения.
При появлении сигнала о, коммутатор 14 подключает ко входам блока
умножения 15 сигналы Fg и F, , одно временно по переднему фронту сигнала ( формирователем запускающих импуль- сов 19 запускается блок умножения 15, который результат умножения сигналов FO и Fi, сформирует в сумматоре 16,
.. 1
Аналогично сигналы т. и Э сформируют
соответственно пар сиг- F,n и F,
произведение налов Fa и F
РУЮТ их в .uynnci 1 .1 u р oiai ПСЫ -q, ,
Сформированный блоком управления 17, запишет в цифровое табло 18 результат
, 1VO и -с и просумми- ;сумматоре .16, Сигнал / измерения, а сигнал у сбросит сумматозо го-цифровые преобразователи, выходы
16 в нулевое состояние,
После этого вновь появляется сигнал и процесс взвешивания повторяется.
коммутатора через блок умножения и сумматор подключены к входу цифре вог табло, блок управления подключен к управляющим входам коммутатора, сумм
Вторые выходы маятниковых датчиков тора цифрового табло и через форми- 5, 6 и 7 подключены к световым индика- рователь запуска:ющих импульсов к заторам 20 - 22, на которых сигналы пускающему входу блока умножения.
F, и F
7 визуально индицируют вели у
5
0
5
чины углов отклонения снлоизмерительных датчиков 2-4 от вертикали.
Формула изобретения
Весовое устройство, содержащее грузоприемную платформу или бункер, установленные на силоизмерительные / датчики, аналого-цифровые преобразователи по чисЛу силоизмерительных датчи- ков, источник питания и цифровое табло, о т л и ч а ю щ е е с я тем, что, с целью повышения точности взвешивания, в него введены маятниковые датчики угла отклонения от вертикали со световыми индикатора, преобразователи сигналов по числу снлоизмерительных датчиков, коммутатор, блок умножения, сумматор, блок управления и формирователь запускающих импульсов, при зтом маятниковые датчики установлены на соответствующих силоизмерительных датчиках и через преобразователи сигналов Подключены к входам коммутатора, к остальным входам которого подключены выходы силоизмерительных датчиков через соответствующие аналог
коммутатора через блок умножения и сумматор подключены к входу цифре вого табло, блок управления подключен к управляющим входам коммутатора, сумма
| Устройство для определения веса рыбы, загруженной в прямостенную емкость | 1974 |
|
SU525854A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка силоизмерительного датчика с возможностью его отклонения от вертикали | |||
| Каталог фирмы Hottinger BaldwinMesstechnik Gl-IBH. | |||
