(54) ВЕСЫ ДЛЯ ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ В ДВИЖЕНИИ Изобретение относится к весоизмерительной технике. Иэвестно устройство для взвешивания быстродвижущихся объектов, содержащее грузоприемный узел, силоизмерительные датчики и регистрирующий прибор. В этом устройстве компенсация динамической погрешности производится при помощи двух последовательно включенных трансформаторов (11. Однако данное устройство компенсирует динамическую пограиность толь ко в том случае, если помеха представляет собой стационарный, установившийся процесс. При взвешивании объектов в движении на вход системы поступает сигнал, представляющий собой ступенчатую функцию с малым временем действия, что снижает эффектив ность этого устройства. Этот недостаток частично устране в устройствах, осуществляющих подавление динамической помехи путем интегрирования в интервале времени меж ду началом и окончанием взвешивания При этом способе подавления дина мической помехи точность взвешивани зависит от точности определения начала и конца взвешивания. При взвешивании автомобилей в движении эта задача осложняется тем, что длина контакта колеса автомашины с поверхностью весов велика и может быть соизмеримой с длиной платформы. Для повьваения точнрсти необходимо, чтобы устройство управления возможно точнее определило момент нахождения на платформе задней границы пятна контакта. Наиболее близкими к предлагаемому по технической сущности являются весы для взвешивания автомобилей в движении, содержащие платформу, опирающуюся на силоизмерительные датчики, и устройство управления, подключенного к регистрирующему прибору 2. Недостатком известного устройства является то, что оно не обеспечивает достаточной точности взвешивания, поскольку отсутствует точная связь между положением колёса на платформе и соотношением сигналов датчиков. Соотношение сигнешов может быть искажено наличием динамической помехи. Это устройство не может быть универсальным, так как соотношение сигналов является постоянным и выбирается только для конкретного типа автомобилей.
Цель изобретения - повышение точности взвешивания.
Эта цель достигается тем, что устройство управления выполнено в виде, по крайней мере, двух балок, расположенных на противоположных краях платформы, причем каждая балка опирается на чувствительные элементы, которые подключены через последовательно соединенные схему ИЛИ, и формирователь прямоугольного импульса и дифференцирующую цепь соответственно к формированиям управляющего си.гнала по заднему фронту импульса и по переднему фронту импульса.
На чертеже схематично изображено устройство.
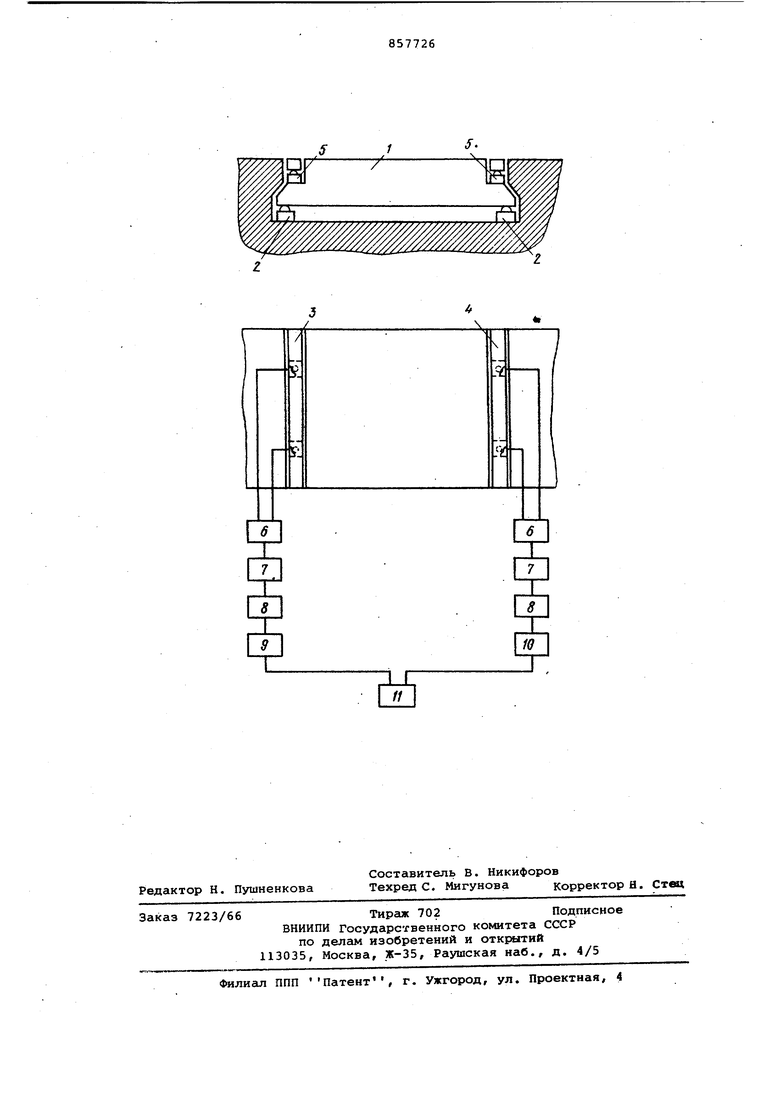
Устройство содержит платформу 1, опирающуюся на силоизмерительные датчики 2, балка 3 и 4, опирающиеся на чувствительные элементы 5, схемы ИЛИ 6, формирователи 7 прямоуголь:ного импульса, дифференцирующие це:пи 8, формирователь 9 управляющего сигнала по заднему фронту импульса, формирователь 10 управляющего сиг- . нала по переднему фронту импульса и регистрирующий прибор 11.
Устройство работает следующим образом.
При наезде колеса на балку 3 в чувствительном элементе 5 вырабатывается сигнал, который через схему ИЛИ 6 попадает в блок 7, который формирует прямоугольный импульс. Дифференцирующая цепь 8 преобразует этот импульс в два импульса, а формирователь 9 управляющего сигнала подавляет импульс переднего фронта, формируя сигнал на начало взвешивания. При проезде колеса по балке 4 .сигнал возбуждается и преобразуется аналогичным образом,за исключением того, что формирователь 10 управляющего сигнала подавляет импульс заднего фронта, формируя сигнал на окончание взвешивания.
Преимуществом предлагаемого устройства является более высокая точность взвешивания по сравнению с известными за счет более точного определения момента начала и конца взвешивания, а также за счет формирования максимального интервала времени взвешивания. Кроме того, предлагаемое устройство является универсальным, т.е. позволяет взвешивать автомобили в движении любого типа.
Формула изобретения
Весы для взвешивания автомобилей в движении, состоящие из платформы, опирающейся на силоизмерительные датчики, устройства управления, подключенного к регистрирукяцему прибору, отличающи еся тем, что, с целью повышения точности, устройство управления выполнено в виде, по крайней мере, двух балок, расположенных на противоположных краях платформы, причем каждая бешка опирается на чувствительные элементы, которые подключены через последовательно соединенные схему ИЛИ, формирователь прямоугольного импульса и дифферёнцирую|Щуюся цепь соответственно к формирователям управляющего сигнала по заднему .фронту импульса и по переднему фронту импульса.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 289299, кл. G 01 G 23/36, 1969.
2.Патент США № 3835945 к.)Г. 177-134, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для взвешивания движущихся объектов | 1978 |
|
SU731304A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |
| Способ поосного взвешивания движущихся объектов | 1983 |
|
SU1137329A1 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Весы для взвешивания транспортных средств в движении | 1978 |
|
SU932270A1 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Устройство для взвешивания движущихся объектов | 1976 |
|
SU618649A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |