Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров управляемых подвижных объектов.
Известен способ компенсации перекрестной связи, описанный в книге "Командно-измерительные приборы" Б.И. Назаров, С.А. Черников, Г.А. Хлебников, Г.В. Верхов, Министерство обороны СССР, Москва 1987, стр. 47-65, принятый за прототип, в котором используют основной и дополнительный маятниковые акселерометры с наиболее идентичными параметрами, выходные оси которых параллельны друг другу, измеряют с помощью датчиков угла отклонения физических маятников под действием ускорения, при этом, создают противодействие отклонению маятников с помощью электрических пружин, состоящих из датчика угла и задатчика момента, связанных усилителем обратной связи, оси чувствительности акселерометров устанавливают параллельно друг другу, сигнал, соответствующий измеряемому ускорению с компенсированной перекрестной связью, получают путем суммирования выходных сигналов акселерометров. Недостатком способа является необходимость применения дополнительного стороннего акселерометра.
Задачей изобретения является использование ортогональных акселерометров из одной навигационной системы в качестве основного и компенсирующего акселерометров (т.е. отсутствие необходимости использования дополнительного стороннего акселерометра в навигационной системе).
Для решения поставленной задачи выходной сигнал компенсируемого акселерометра подается на вход цифровой модели акселерометра, выход которой в виде сигнала, имитирующего отклонение маятника относительно "нулевого" положения, перемножается с выходным сигналом акселерометра, измерительная ось которого ортогональна измерительной оси компенсируемого акселерометра; сигнал, полученный в результате перемножения, суммируется с выходным сигналом акселерометра, полученный при этом сигнал соответствует измеряемому ускорению, очищенному от перекрестной связи.
Способ компенсации перекрестных связей опирается на следующие соображения.
Модель движения акселерометра можно представить в следующем виде:

где
J - момент инерции маятника;
D - удельный момент сил вязкого трения;
К - коэффициент усиления "электрической пружины";
W(s) - передаточная функция регулятора;
ml - маятниковость;
ах - измеряемое ускорение;
ау - ускорение, измеряемое в ортогональном направлении.
В составе ускорений ах и ау из-за наличия вибраций на борту изделия могут быть периодические составляющие.
При появлении гармонической составляющей в ускорении уравнение акселерометра будет выглядеть следующим образом:

Составляющая Δaysinωt ρ содержит произведение двух синусоид, так как ρ содержит периодическую составляющую. Произведение синусоид порождает гармонику удвоенной частоты, смещенной относительно нулевого положения, так как 
Следовательно, если перекрестная связь содержит периодические составляющие, то возникает погрешность смещения нуля акселерометра.
В составе инерциальной системы кроме акселерометра, измеряющего составляющую ах, есть акселерометр, измеряющий ортогональную составляющую ау, что может быть использовано для компенсации перекрестной связи.
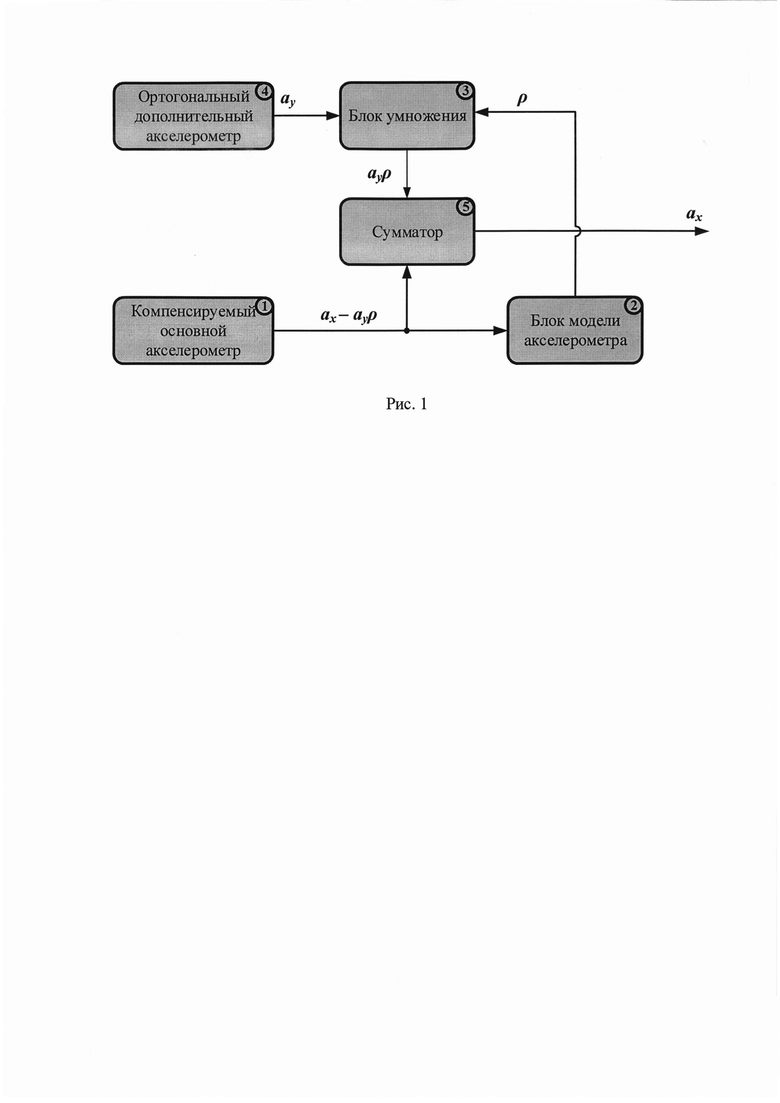
Рассматриваемый способ компенсации перекрестных связей можно проиллюстрировать с помощью структурной схемы (рис. 1).
Сигнал компенсируемого основного акселерометра 1 подается на вход блока модели акселерометра 2, где определяется сигнал соответствующий отклонению маятника под действием ускорения. Для определения перекрестной связи этот сигнал перемножается в блоке умножения 3 с сигналом ортогонального дополнительного акселерометра 4. Сигнал перекрестной связи суммируется в сумматоре 5 с сигналом компенсируемого акселерометра для получения сигнала очищенного от перекрестной связи.
Таким образом, заявлен способ компенсации перекрестных связей маятникового акселерометра, заключающийся в том, что используют основной и дополнительный маятниковые акселерометры с наиболее идентичными параметрами, выходные оси которых параллельны друг другу, измеряют с помощью датчиков угла отклонения физических маятников под действием ускорения, при этом создают противодействие отклонению маятников с помощью электрических пружин, состоящих из датчика угла и задатчика момента, связанных усилителем обратной связи. Отличительная особенность способа заключается в том, что в качестве дополнительного акселерометра используют акселерометр навигационной системы основного акселерометра так, что оси чувствительности акселерометров ортогональны друг другу, с помощью модели акселерометра определяют отклонение маятника основного акселерометра под действием ускорения, для чего сигнал основного акселерометра подают на вход модели акселерометра; формируют сигнал произведения выходного сигнала модели акселерометра и выходного сигнала дополнительного акселерометра, сигнал соответствующий измеряемому ускорению с компенсированной перекрестной связью получают путем суммирования сигнала произведения и сигнала основного акселерометра.
Техническим результатом изобретения является использование ортогональных акселерометров из одной навигационной системы в качестве основного и компенсирующего акселерометров (т.е. отсутствие необходимости использования дополнительного стороннего акселерометра в навигационной системе).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ ПО КАНАЛУ АКСЕЛЕРОМЕТРОВ | 2011 |
|
RU2477864C1 |
| МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2240566C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Способ определения нестационарных углов тангажа и крена и устройство для его реализации | 2022 |
|
RU2780360C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334198C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| Компенсационный маятниковый акселерометр | 1985 |
|
SU1286902A1 |
Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров управляемых подвижных объектов. В способе выходной сигнал компенсируемого акселерометра подается на вход цифровой модели акселерометра, выход которой в виде сигнала, имитирующего отклонение маятника относительно нулевого положения, перемножается с выходным сигналом акселерометра, измерительная ось которого ортогональна измерительной оси компенсируемого акселерометра; сигнал, полученный в результате перемножения, суммируется с выходным сигналом акселерометра, полученный при этом сигнал соответствует измеряемому ускорению, очищенному от перекрестной связи. Техническим результатом изобретения является использование ортогональных акселерометров из одной навигационной системы в качестве основного и компенсирующего акселерометров. 1 ил. 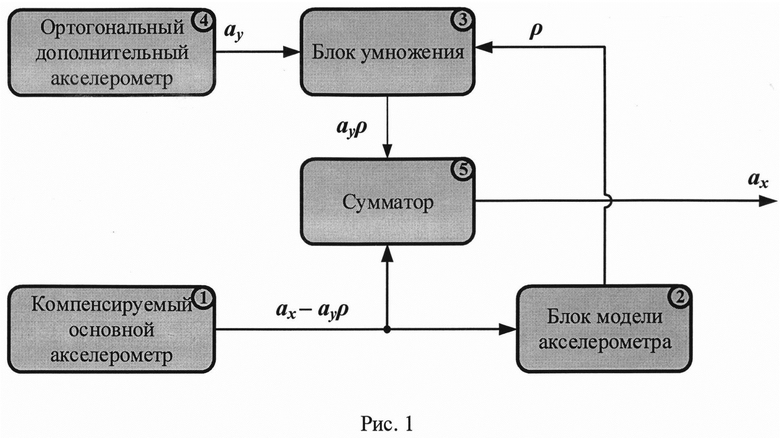
Способ компенсации перекрестных связей маятникового акселерометра, заключающийся в том, что используют основной и дополнительный маятниковые акселерометры с наиболее идентичными параметрами, выходные оси которых параллельны друг другу, измеряют с помощью датчиков угла отклонения физических маятников под действием ускорения, при этом создают противодействие отклонению маятников с помощью электрических пружин, состоящих из датчика угла и задатчика момента, связанных усилителем обратной связи, отличающийся тем, что в качестве дополнительного акселерометра используют акселерометр навигационной системы основного акселерометра так, что оси чувствительности акселерометров ортогональны друг другу, с помощью модели акселерометра определяют отклонение маятника основного акселерометра под действием ускорения, для чего сигнал основного акселерометра подают на вход модели акселерометра; формируют сигнал произведения выходного сигнала модели акселерометра и выходного сигнала дополнительного акселерометра, сигнал, соответствующий измеряемому ускорению с компенсированной перекрестной связью, получают путем суммирования сигнала произведения и сигнала основного акселерометра.
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАБИЛЬНОСТИ ПОЛОЖЕНИЯ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1978 |
|
SU1839841A1 |
| US 6651027 B2, 18.11.2003 | |||
| US 7418364 B1, 26.08.2008. | |||

