10
15
t1280158
Изобретение относится к автоматие и может быть использовано в систеах автоматического управления силоой установкой, преимущественно гаотурбинным двигателем.
Известна многомерная система упавления силовой установкой, содеращая селектор мини1«1ума,, блок формирования команд и группу управляю- их устройств, каждое из которых состоит из регулятора с датчиком обратной связи, подключенного непосредственно и через селектор к входам однонолярного усилителя, связанного вместе с задатчиком и блоком формирования команд с входа -ш блока управлении, выполненного в виде поаледо- вательно соединенных суммирующет-о усилителя, коммутатора и интегратора с ограничителем l .
Однако известная система не обеспечивает заданную пусковую программу управления д зигателем в те.х случаях, когда в процессе пуска регулятор управля1ош,его устройства, интегратор блока уи1;а.11.11ения которого используется н качестве временного програм- М1-ГОГО задатчика, оказывается в дежурном режиме. Это обусловливается тем, что интегратор воснроизводит заданную времен ну.ю программу по сигналу формирования команд независимо от того, 3 управлупощем или в дежурном режиме работает рассматриваемое унрав- ляющее устройство. Поэтому в дежурном ре};;име выходной сигнал интегратора достигает задггнного предельного значения зпачитеольно ранья1е вькод- ног о сигнала датчика контро- лируемо1 О параметра, а из-за наличия - сигнала рассог ласо- в ан и я р е г ул я т о р у и р а вл я юще г о у ст - ройства оказывается в релсиме насыщения. В результате не только искажг - ется заданная пусковая программа, но и ухудшаются на пусковом режиме динамические свойства cиcтe ы при за- щи.те o l недопустимого повышения конт20
25
30
35
40
45
ролируемого параметра при резких воз- мущен1-5ях, вызывающих увеличение нагрузки установки.
Цель изобретения повышение надежности путем обеспечения управляю- ищм устройством в дежурном режиме непрерывного контроля за заданной допустимой скоростью изменения параметра.
5
0
5
0
5
0
5
0
5
Поставленная цель достигается тем, что управляющие устройства дополнительно содержат инерционное звено и второй селектор минимума, включенный между блоком управления и регулятором,, причем выход икерциорнюго звена подключен к второму селектору и к ограничителю интегратора блока управления, а входы - к выходам задат-, чика и однополярного усилителя.
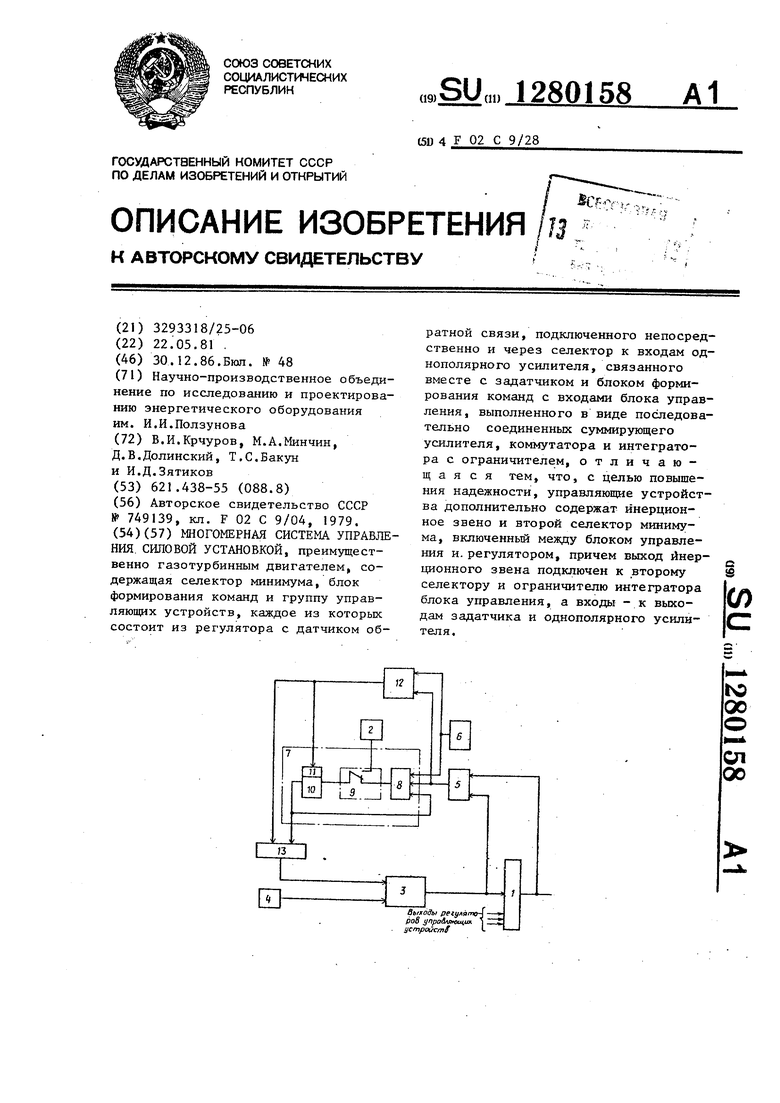
На чертеже представлена блок-схема системы.
Система содержит селектор I минимума, блок 2 формирования команд и группу управляющих устройств, каждое из которых состоит из регулятора 3 с датчиком 4 обратной связи, одно- полярного усилителя 5, задатчика 6, блока 7 управления, выполненного в
виде суммируюа1,его усилителя о, коммутатора 9 и интегратора 10 с ограничителем 11. Управляющие устройства также содержат инерционное звено 12 и второй селектор 13 минимума.
Система работает следующим образом.
Выходной сигнал сепектора 13 является заданием регулятору 3, на вход которого также поступает сигнал датчика 4. Селектор 13 вырабатывает в качестве задания наименьший из двух сигналов, поступающих с инерционного звена 12 и интегратора 10.Инерционное звено 12 непрерывно отслеживает с выбранной постоянной времени суммарный сигнал, формируемый задатчиком 6 и усилителем 5.
Блок 7 управления также представляет собой инерционное звено, когда усилитель 8 подключен по внешней команде комьгутавтором 9 к входу интегратора 10. Если постоянные времени инерционного звена 21 и блока 7 в этом варианте выбраны одинаковыми, то выходные сигналы этих инерционных звеньев не будут отличаться друг от друга независимо от того, в дежурном или ведущем рехиме работает регулятор 3,
Усилитель 5 сра зпнвает уровень выходного сигнала зегулятора 3 с уровнем выходного сигнала селектора 1 и воспроизводит усиленный однопо- лярный сигнал на входе инерционного звена 12 и суммирующего усилителя 8. Благодаря наличию в схеме усилителя 5 и инерционного звена 12 регулятор 3 Е дежурном режима отслеживает вы,
312
ходной сигнал селектора I, а селектор 1 3 - выходной сигнал датчика 4 даже в тех случаях, когда интегратор 10 работает в качестве программного временного задатчика от блока 2 фор- мирования команд.
Если в процессе пуска регулятор 3 работает в дежурном режиме, то это обусловлено тем, что скорость изменения параметра, контролируемого дат чиком 4, меньше допустимой скорости формируемой блоком 2 на входе интегратора 10,
Дпя того, чтобы защита от превышения допустимой скорости изменения параметра в процессе пуска осуществлялась непрерывно, интегратор 10 должен отслеживать текущее значение параметра и с этих начальных условий в момент перехода регулятора 3 в ведущий режим воспроизводить изменение выходного сигнала с заданной скоростью. С этой целью выходной сигнал инерционного звена 12 коммутируется на вход ограничителя 11 выходного сигнала интегратора lOi
При переходе регулятора 3 в ведущий режим выходной сигнал усилите
Редактор М.Товтин Заказ 7035/31
Составитель Ю.Редько Техред А.Кравчук
Корректор
Тираж 523Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
fO
801
5
,
15
20
25
584
ля 5 становится равным нулю и инерционное звено 12 отрабатывает с выбранной постоянной времени предельный сигнал задания, формируемый задатчи- ком 6. Интегратор 10 с начальных условий, соответствующих текущему значению контролируемого параметра,начинает увеличивать сигнал со скоростью, определяемой блоком 2., Темп изменения сигнала интегратора 10 значительно меньше темпа изменения сигнала инерционного звена 12, поэтому селектор 13 пропускает на вход регулятора 3 сигнал интегратора 10, как наименьший из двух входных сигналов.
I
В результате процесс пуска продолжается по заданной временной программе , а переход с дежурного режима на ведущий происходит безударно.
Таким образом, данная система обеспечивает заданную пусковую программу управления независимо от режима работы блока 7, определяемого внешней командой, воздействующей на коммутатор 9. Это повышает надежность пуска установки и работы двигателя в целом.
Корректор А.Ильин
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования энергетической установки | 1989 |
|
SU1758260A1 |
| Система управления ветряной турбиной | 1979 |
|
SU1098527A3 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2172419C1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| Система управления непрерывной разливкой жидкого металла | 1974 |
|
SU607643A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Авторское свидетельство СССР № 749139, кп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
