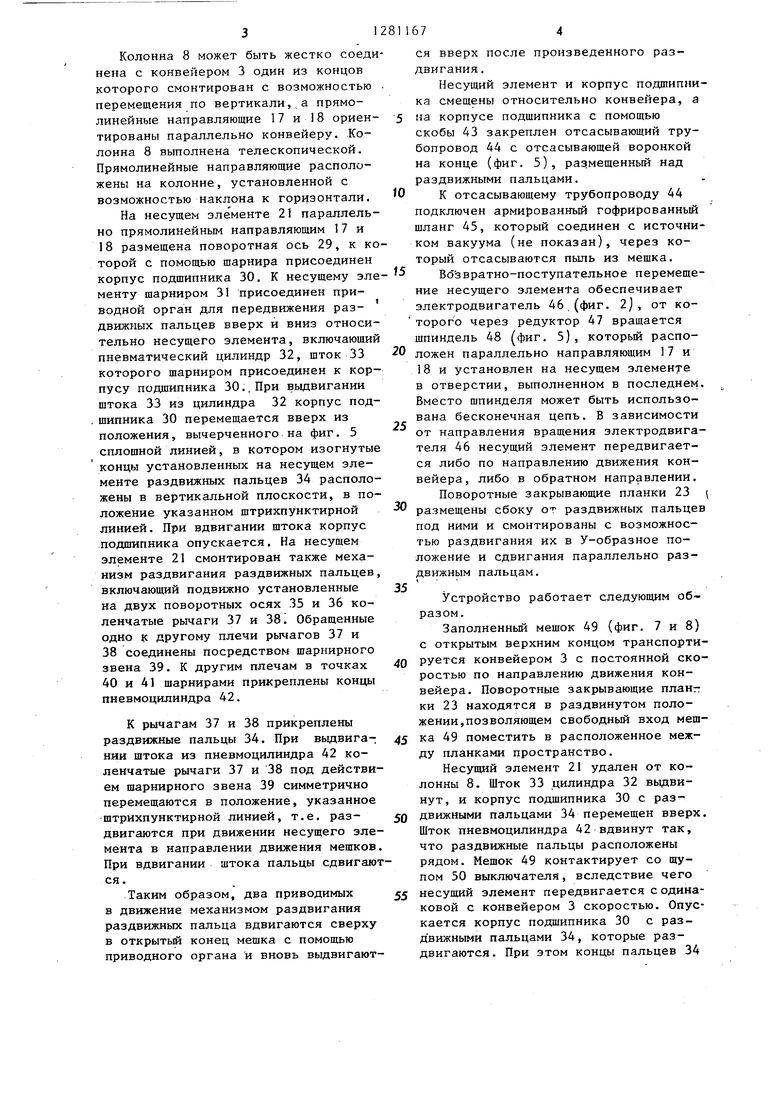
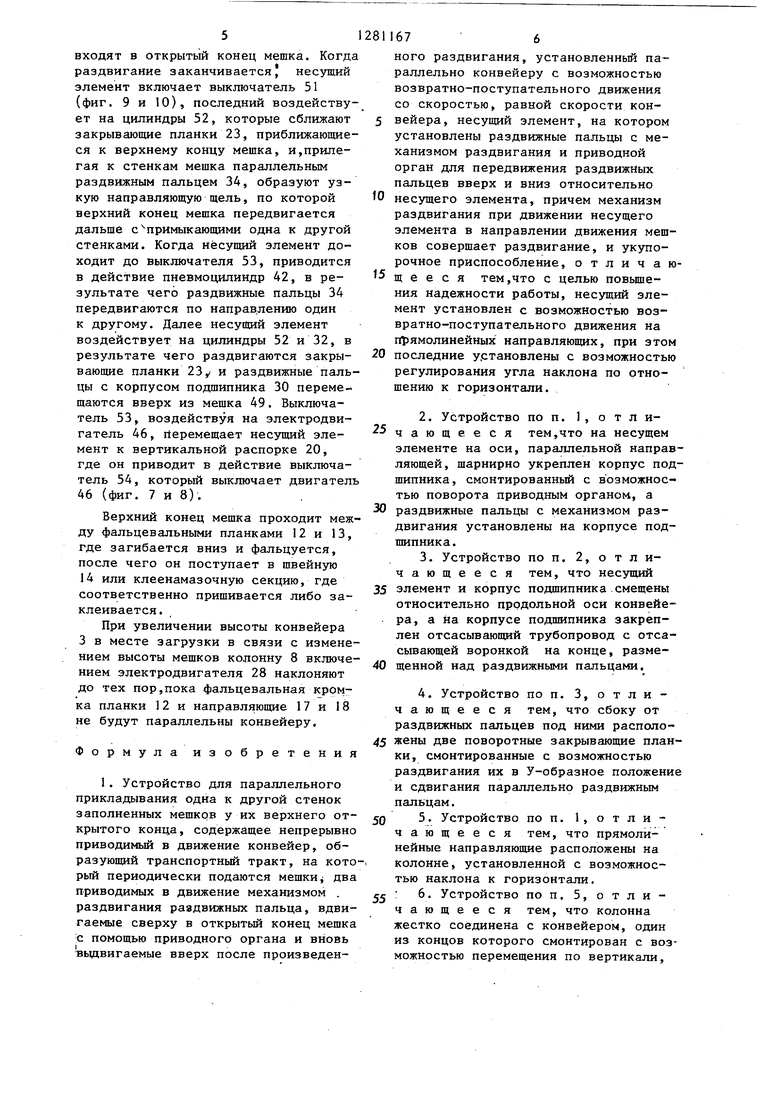
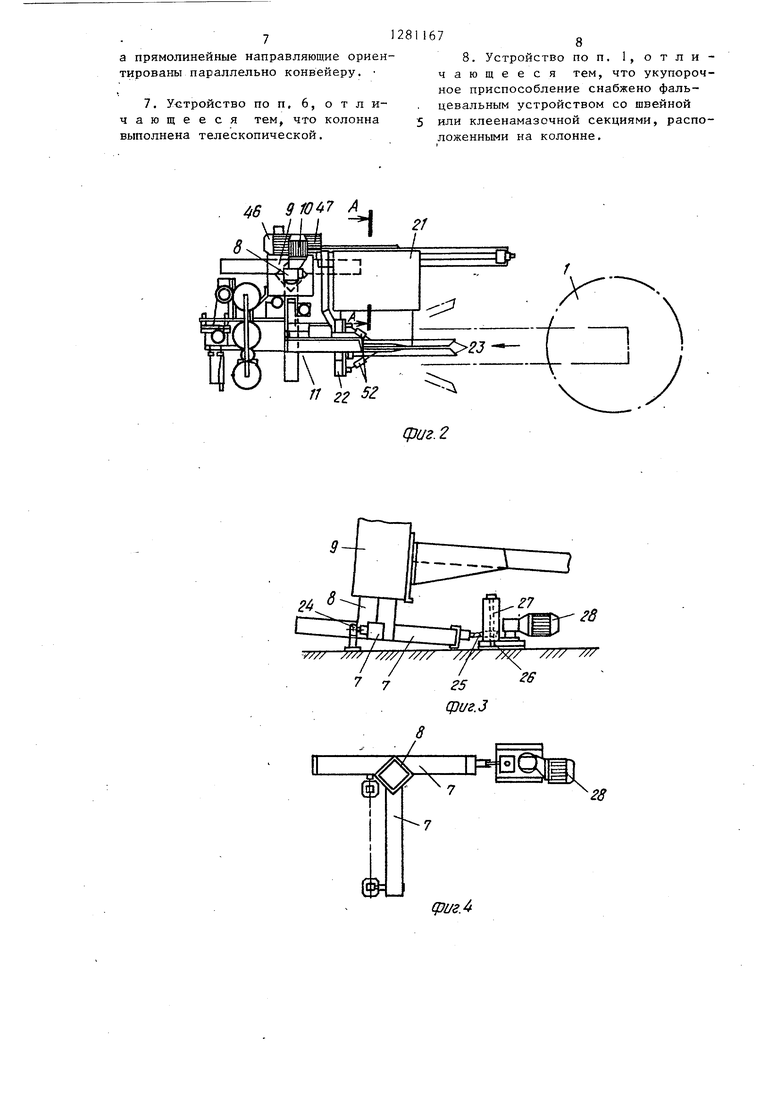
Изобретение относится к упаковочному оборудованию, в частности к уст ройствам для закрывания наполненных мешков. Целью изобретения является повышение надежности работы. Расположение несущего элемента на прямолинейных направляющих, угол наклона которых можно регулировать по отношению к горизонтали, уставка несущего элемента с возможностью ,возвратно-поступательного движения на наравляющих, установка раздвижных пальцев с механизмом раздвигания на корпусе конвейера, смонтированного с возможностью поворота, смещение несущего элемента и корпуса подшипника относительно продольной оси под шипника, наличие закрывающих планок и отсасывающего трубопровода, размещение прямолинейных направляющих на телескопической колонне, установленной с возможностью наклона к гори зонтали, и ориентация прямолинейных направляющих параллельно конвейе ру, размещение укупорочного приспособления на колонне позволит расположить верхний конец мешка без искривлений по отношению к рабочим ор ганам укупорочного приспособления и осуществить качественное закрывание мешков. На фигл 1 изображено устройство для параллельного прикладывания одна к другой стенок заполненных мешков, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - колонна, вид сп реди; на фиг. 4 - то же, вид сверху . на фиг. 5 - разрез А-А на фиг. 2; на фиг. 6 - разрез Б-Б на фиг. 5; фиг. 7,9,11,13 - процесс параллельного прикладывания стенок мешка, ви спереди; на фиг. 8, 10, 12, 14 - то же, вид сверху., Устройство для параллельного прикладывания одна к другой стенок заполненных мешков содержит карусельную мешконаполнительную машину 1, ко торая периодически подает заполненные мешки 2 на непрерывно приводимый в движение конвейер 3, образующий транспортный тракт. Конвейер 3 вьтол нен ленточным. Один конец конвейера 4 установлен с возможностью перемещения по вертикали, смонтирован на опоре 5 и может быть повернут вокруг оси 6. Опора 5 может быть вьтолнена в виде домкрата. Регулируя наклон 72 конвейера, можно изменять расстояние Н между конвейером и мешконаполнительной машиной 1 с высотой заполняемых мешков и тем самым поддерживать постоянную минимальную высоту падения мешков, У конвейера на треножнике 7 установлена колонна 8 с передвигаемой по высоте вдоль колонны рубашкой 9, которая через трапецеидальную резьбу (не изображена) приводится в движение электродвигателем 10. Укупорочное приспособление расположено на колонне 8 и снабжено фальцевальным устройством 11 с фальцевальными планками 12 и 13, причем верхняя кромка планки 12 определяет фальцевальную линию, и швейной 14 или клеенамазочной секциями . К рубашке 9 прикреплена балка 15 с закрепленной на ней рамой 16, которая состоит из двух продольных прямолинейных направляющих 17 и 18 и двух вертикальных распорок 19 и 20. Угол наклона прямолинейных направляющих можно регулировать по отношению к горизонтали. На прямолинейных направляющих 17 и 18 установлен с возможностью возвратно-поступательного перемещения несущий элемент 2, смонтированный параллельно конвейеру, со скоростью, равной скорости конвейера. К вертикальной распорке 19 рамы 16 прикреплена консоль 22, к которой шарнирами прикреплены закрывающие планки 23. Треножник 7 колонны 8 может быть установлен подвижно и передвигаться вокруг оси 24, расположенной поперечно направлению движения конвейера 3 (см. фиг. 3 и 4). Треножник 7 шарниром присоединен в точке 25 к телу гайки 26 на приводимом электровигателем шпинделе 27,, чем обеспечивается перемещение треножника. Включением электродвигателя 28 можно вращать шпиндель 27 и тем самым лзменять наклон колонны 8 таким образом, что уменьшается угол наклона фальцевальных планок 12 и 13 относительно горизонтальной плоскости. Таким образом, в случае изменения угла накло55 конвейера 3 вращением шпинделя i27 фальцевальное устройство 11 уставдавливается так, чтобы была обеспечена параллельность фальцевальной ли-нии и конвейера.Колонна 8 может быть жестко соед нена с конвейером 3 один из концов которого смонтирован с возможностью перемещения по вертикали,,а прямолинейные направляющие 17 и i В ориен тированы параллельно конвейеру. Колонна 8 выполнена телескопической. Прямолинейные направляющие расположены на колонне, установленной с возможностью наклона к горизонтали. На несущем элементе 21 параллель но прямолинейным направляющим 17 и 18 размещена поворотная ось 29, к ко торой с помощью шарнира присоединен корпус подшипника 30. К несущему эле менту шарниром 31 присоединен приводной орган для передвижения раздвижных пальцев вверх и вниз относительно несущего элемента, включающий пневматический цилиндр 32, щток 33 которого щарниром присоединен к корпусу подшипника 30.. При вьщвигании штока 33 из цилиндра 32 корпус подшипника 30 перемещается вверх из положения, вычерченного на фиг. 5 сплошной линией, в котором изогнутые концы установленных на несущем элементе раздвижных пальцев 34 расположены в вертикальной плоскости, в положение указанном штрихпунктирной линией. При вдвигании штока корпус подшипника опускается. На несущем элементе 21 смонтирован также механизм раздвигания раздвижных пальцев включающий подвижно установленные на двух поворотных осях 35 и 36 коленчатые рычаги 37 и 38) Обращенные одно к другому плечи рычагов 37 и 38 соединены посредством шарнирного звена 39. К другим плечам в точках 40 и Д1 шарнирами прикреплены концы пневмоцилиндра 42. К рычагам 37 и 38 прикреплены раздвижные пальцы 34. При вьщвигании штока из пневмоцилиндра 42 коленчатые рычаги 37 и 38 под действием шарнирного звена 39 симметрично перемещаются в положение, указанное штрихпунктирной линией, т.е. раздвигаются при движении несущего элемеита в направлении движения мешков При вдвигании штока пальцы сдвигают ся. Таким образом, два приводимых в движение механизмом раздвигания раздвижных пальца вдвигаются сверху в открытьй конец мешка с помощью приводного органа и вновь вьщвигаются вверх после произведенного раздвигания. Несущий элемент и корпус подшипника смещены относительно конвейера, а на корпусе подшипника с помощью скобы 43 закреплен отсасывающий трубопровод 44 с отсасывающей воронкой на конце (фиг. 5), размещенный над раздвижными пальцами. К отсасывающему трубопроводу 44 подключен армированный гофрированный шланг 45, который соединен с источником вакуума (не показан), через который отсасываются пыль из мешка. Вбз вратно-поступательное перемещение несущего элемента обеспечивает электродвигатель 46,(фиг. 2), от которого через редуктор 47 вращается шпиндель 48 (фиг. 5), который расположен параллельно направляющим 17 и 18 и установлен на несущем элементе в отверстии, выполненном в последнем. Вместо шпинделя может быть использована бесконечная цепь. В зависимости от направления вращения электродвигателя 46 несущий элемент передвигается либо по направлению движения конвейера, либо в обратном направлении. Поворотные закрывающие планки 23 размещены сбоку от раздвижных пальцев под ними и смонтированы с возможностью раздвигания их в У-образное положение и сдвигания параллельно раздвижным пальцам. Устройство работает следующим образом. Заполненньй мешок 49 (фиг. 7 и 8) с открытым Верхним концом транспортируется конвейером 3 с постоянной скоростью по направлению движения конвейера. Поворотные закрывающие планг ки 23 находятся в раздвинутом положении, позволяющем свободный вход мешка 49 поместить в расположенное между планками пространство. Несущий элемент 21 удален от колонны 8. Шток 33 цилиндра 32 вьщвинут, и корпус подшипника 30 с раздвижными пальцами 34 перемещен вверх. Шток иневмоцилиндра 42 вдвинут так, что раздвижные пальцы расположены рядом. Мешок 49 контактирует со щупом 50 выключателя, вследствие чего несущий элемент передвигается с одинаковой с конвейером 3 скоростью. Опускается корпус подшипника 30 с раздвижными пальцами 34, которые раздвигаются . При этом концы пальцев 34 5 входят в открыть1й конец мешка. Когда раздвигание заканчивается, несущий элемент включает выключатель 51 (фиг. 9 и 10), последний воздействует на цилиндры 52, которые сближают закрывающие планки 23, приближающиеся к верхнему концу мешка, и,прилегая к стенкам мешка параллельным раздвижным пальцем 34, образуют узкую направляющую щель, по которой верхний конец мешка передвигается дальше с примыкающими одна к другой стенками. Когда несущий элемент доходит до выключателя 53, приводится в действие пневмоцилиндр 42, в результате чего раздвижные пальцы 34 передвигаются по направлению один к другому. Далее несущий элемент воздействует на цилиндры 52 и 32, в результате чего раздвигаются закрывающие планки 23,/ и раздвижные паль цы с корпусом подшипника 30 перемещаются вверх из мешка 49. Выключатель 53, воздействуя на электродвигатель 46, перемещает несзпдий элемент к вертикальной распорке 20, где он приводит в действие выключатель 54, который выключает двигател 46 (фиг. 7 и 8). Верхний конец мещка проходит меж ду фальцевальными планками 12 и 13, где загибается вниз и фальцуется, после чего он поступает в швейную 14 или клеенамазочную секцию, где соответственно пришивается либо заклеивается. При увеличении высоты конвейера 3 в месте загрузки в связи с измене нием высоты мешков колонну 8 включе нием электродвигателя 28 наклоняют до тех пор,пока фальцевальная кромка планки 12 и направляющие 17 и 18 не будут параллельны конвейеру. Формула изобретения 1. Устройство для параллельного прикладывания одна к другой стенок заполненных мешков у их верхнего от крытого конца, содержащее непрерывно приводимый в движение конвейер, образующий транспортный тракт, на кот рый периодически подаются мешки дв приводимых в движение механизмом . раздвигания раздвижных пальца, вдви гаемые сверху в открытый конец мешк с помощью приводного органа и вновь выдвигаемые вверх после произведен676ного раздвигания, установленньй параллельно конвейеру с возможностью возвратно-поступательного движения со скоростью, равной скорости конвейера, несущий элемент, на котором установлены раздвижные пальцы с механизмом раздвигания и приводной орган для передвижения раздвижных пальцев вверх и вниз относительно несущего элемента, причем механизм раздвигания при движении несущего элемента в направлении движения мешков совершает раздвигание, и укупорочное приспособление, отличающееся тем ,что с целью повьшения надежности работы, несущий элемент установлен с возможностью возвратно-поступательного движения на Прямолинейных направляющих, при этом последние установлены с возможностью регулирования угла наклона по отношению к горизонтали. 2. Устройство по п. 1, о т л ичающееся тем,что на несущем элементе на оси, параллельной направляющей, шарнирно укреплен корпус подшипника, смонтированный с возможностью поворота приводным органом, а раздвижные пальцы с механизмом раздвигания установлены на корпусе подшипника. 3.Устройство по п. 2, о т л ичающееся тем, что несущий элемент и корпус подшипника смещены относительно продольной оси конвейера, а на корпусе подшипника закреплен отсасывающий трубопровод с отсасывающей воронкой на конце, размещенной над раздвижными пальцаьш. 4.Устройство по п. 3, отличающееся тем, что сбоку от раздвижных пальцев под ними расположены две поворотные закрывающие планки, смонтированные с возможностью раздвигания их в У-образное положение и сдвигания параллельно раздвижным пальцам. 5. Устройство по п. 1, о т л и чающееся тем, что прямолинейные направляющие расположены на колонне, установленной с возможностью наклона к горизонтали. 6. Устройство по п. 5, отличающееся тем, что колонна жестко соединена с конвейером, один из концов которого смонтирован с возможностью перемещения по вертикали. 7281 а прямолинейные направляющие ориентированы параллельно конвейеру. 7. Устройство по п, 6, отличающееся тем, что колонна выполнена телескопической. 167 8. Устройство по п. 1, о т л и чающееся тем, что укупорочное приспособление снабжено фальцевальным устройством со швейной или клеенамазочной секциями, расположенными на колонне.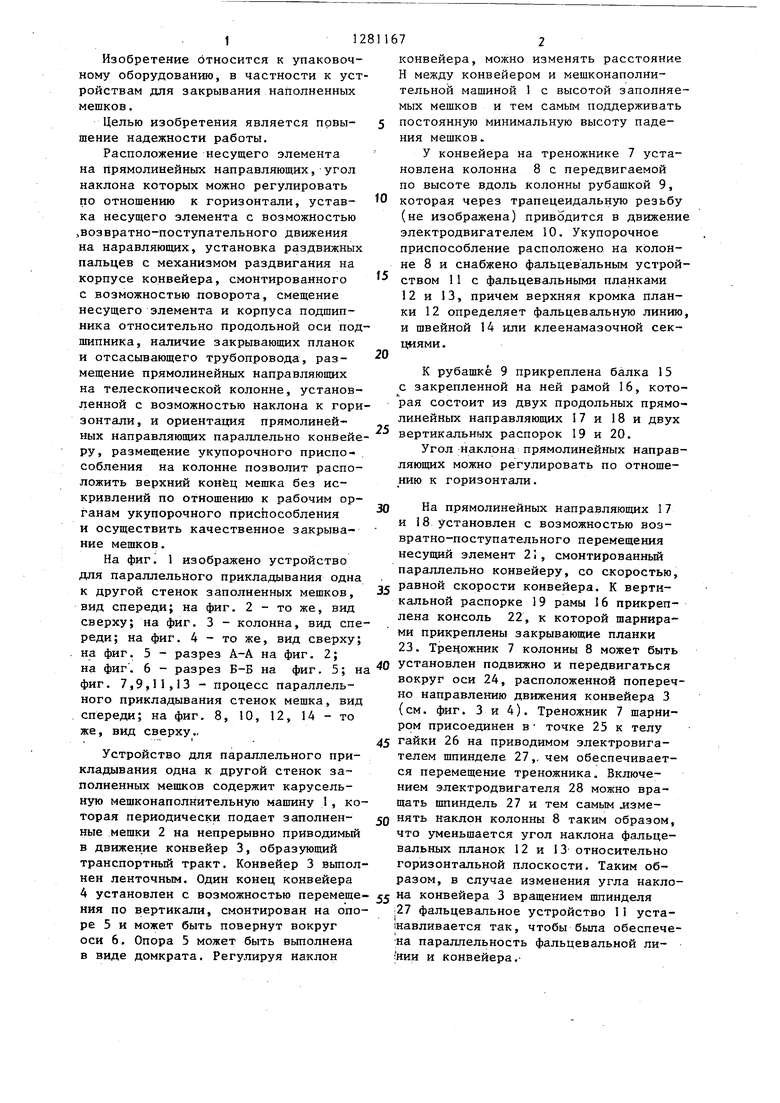
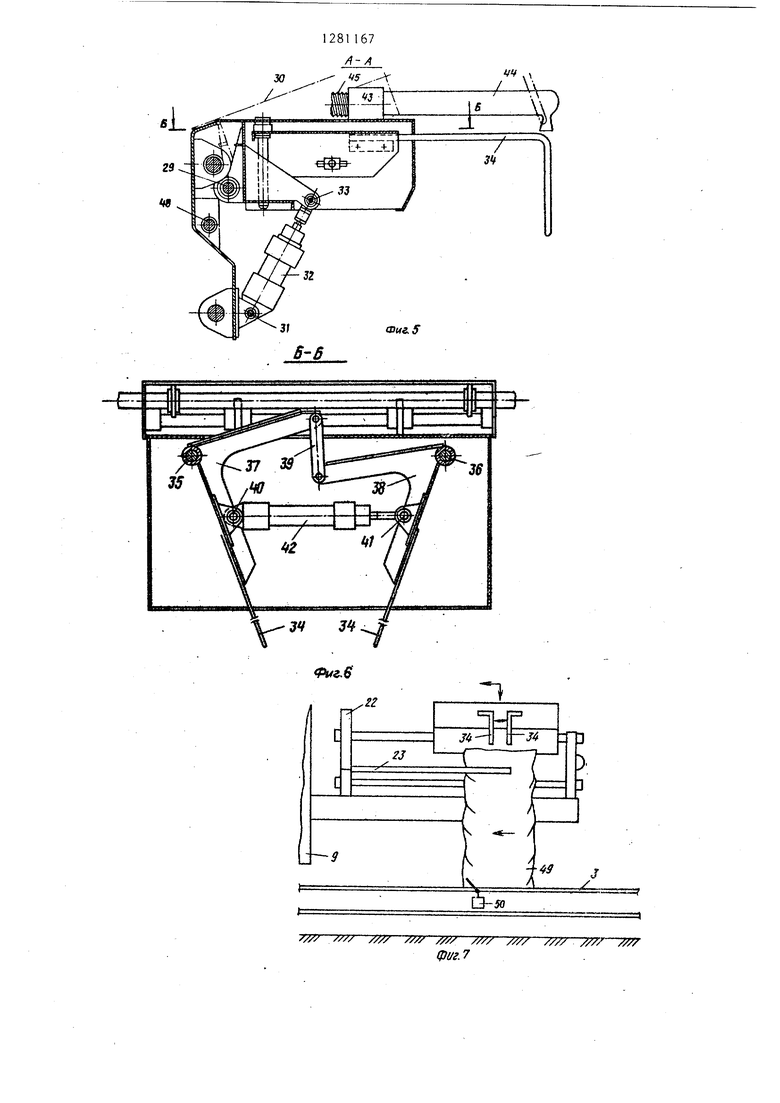
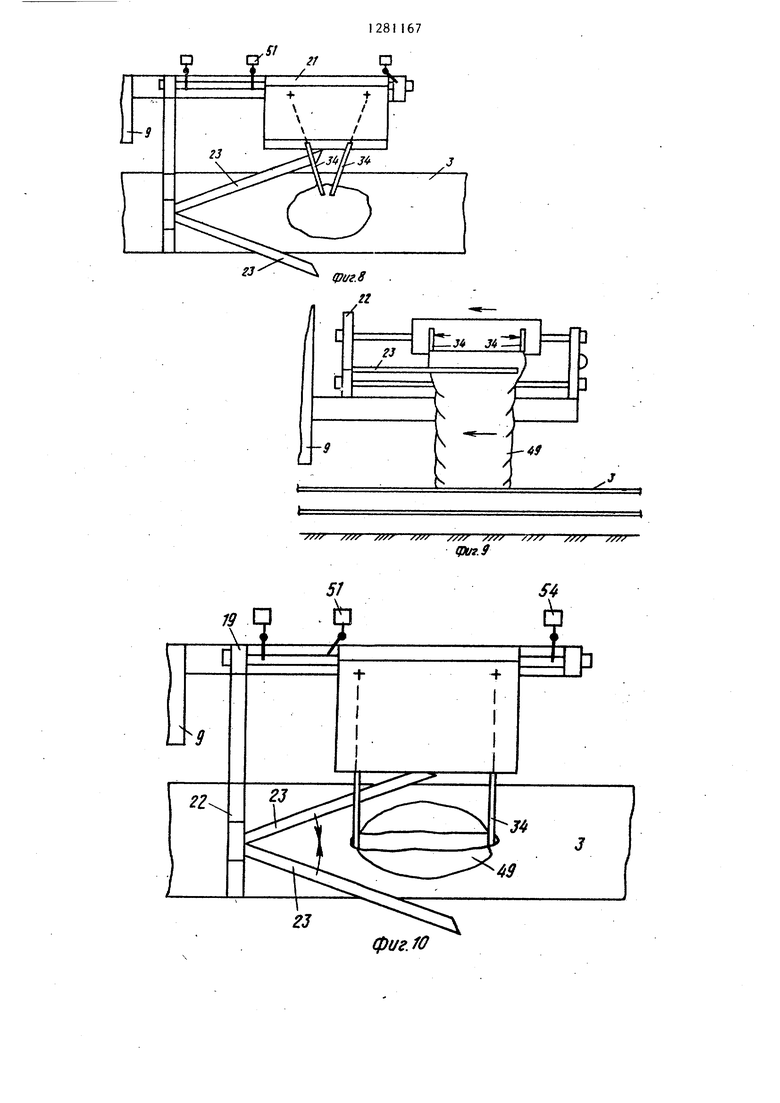
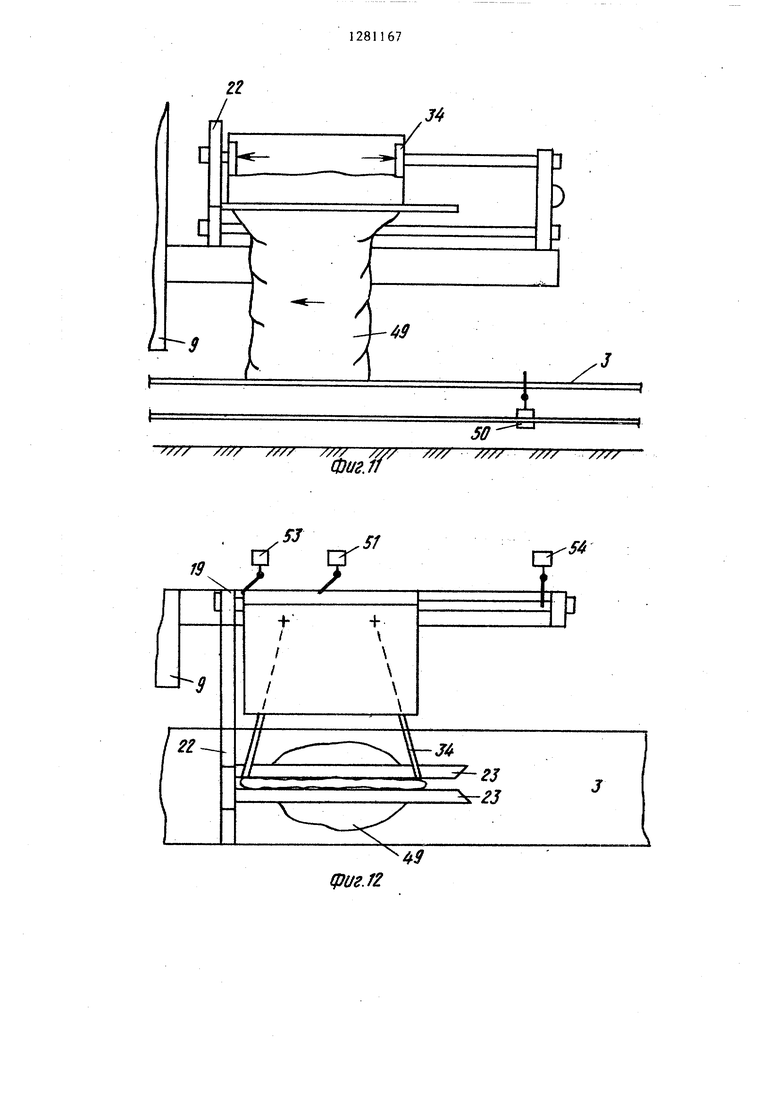
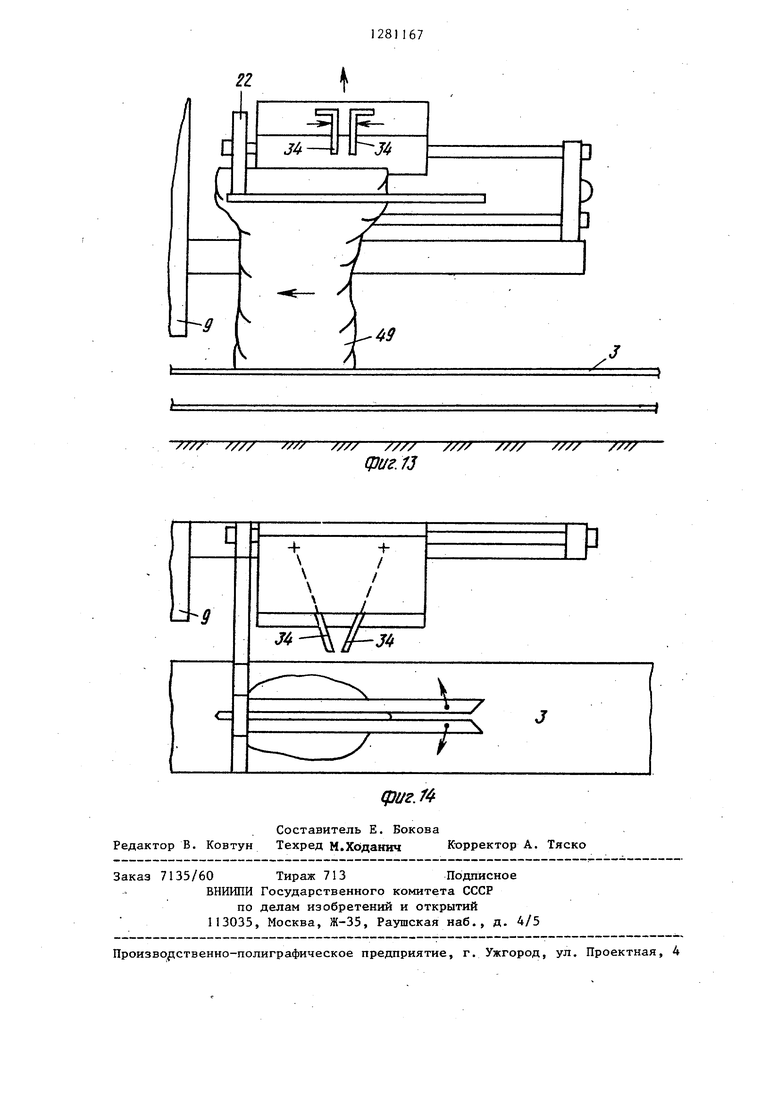
Изобретение относится к упаковочному оборудованию и повышает надежность работы при закрывании наполненных мешков. Для качественного закрывания мешка его верхний конец располагают без искривлений по отношению к рабочим органам укупорочного приспособления (УП). Два раздвижных пальца (РП) 34 вдвигают сверху в открытый конец мешка механизмом раздвигания с помощью приводного органа и выдвигают вверх после проведения раздвигания. Затем в УП верхний конец мешка проходит между фальцевальными планками 12 и 13 для загибания вниз и фальцевания, В швейной или клеенамазочной секции УП приложенные одна к другой стенки мешка прошивают или заклеивают. Несущий элемент 21 РП 34 установлен с возможностью возвратно-поступательного движения и регулирования угла наклона на прямолинейных направляющих 17 и 18. На несущем элементе 21 РП 34 и механизм раздвигания установлены посредством поворотного подшипника. Несущий элемент 21 и корпус . подшипника смещены относительно проО) дольной оси конвейера. Над РП 34 разс мещена отсасывающая воронка трубопровода, закрепленного на подшипнике. .§ Сбоку от РП 34 расположены две поворотные закрывающие планки, они могут располагаться параллельно РП 34 и занимать V-образное положение. 7 3.п. ф-лы. 14 ил. ы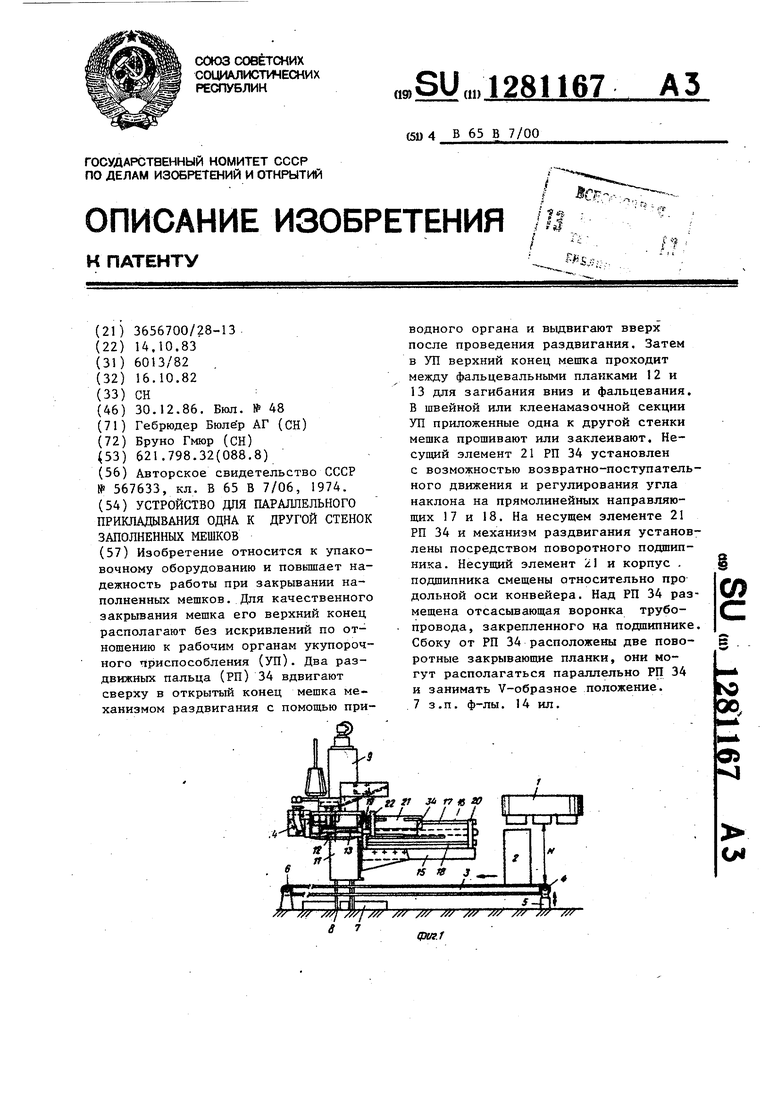
4S А П
Сриг.2 f
Ф(4ЪМ
П
///У 77 //// //// ///7 //// //// 7
фиг.7
St
ZJ
.
23
P
фиг.8
/
/ff /vvv /yvV //,f yVVX X/Vx/VVX X/vV
5/
J
ff
Ttf - -y
ч
Ч ч
4/
nw.y
г. /
.J
Ь
(±-9
/ /
4
Aivx x/vv XX/V /vvv //77 /7/7 ////
Фиг, Л
Sf
/
ф1/г.Г2
S4
r
ч
7У/ /VX/ /WX //77 //// ////
фиг. 13
| Устройство для формирования горловины мешка | 1974 |
|
SU567633A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
