Известные конструкции передвижных машин для погрззки штучных грузов, например заполненных бумажных мешков, из штабеля на транспортное устройство с помощью вакуум-захвата, управляемого механизмами перемешения в вертикальном и горизонтальном направлениях, имеют тот недостаток, что при их использовании отсутствует автоматизация процесса перегрузки мешков из штабеля. Это обусловливает малую производительность машин.
В описываемой передвижной машине для погрузки штучных грузов, в целях увеличения производительности, механизм перемешения вакуум-захвата в горизонтальном направлении смонтирован на поворотной платформе, а последовательность включения в работу механизмов, управляющих вакуум-захватом, осушествлена с помощью системы золотниковых переключателей, вклЮчеиных в магистраль сжатого воздуха. Механизм перемещения вакуум-захвата в горизонтальном направлении выполнен в виде выдвижной рукоятки, несущей пневмоцилиндр, на щтоке которого смонтирован вакуум-захват.
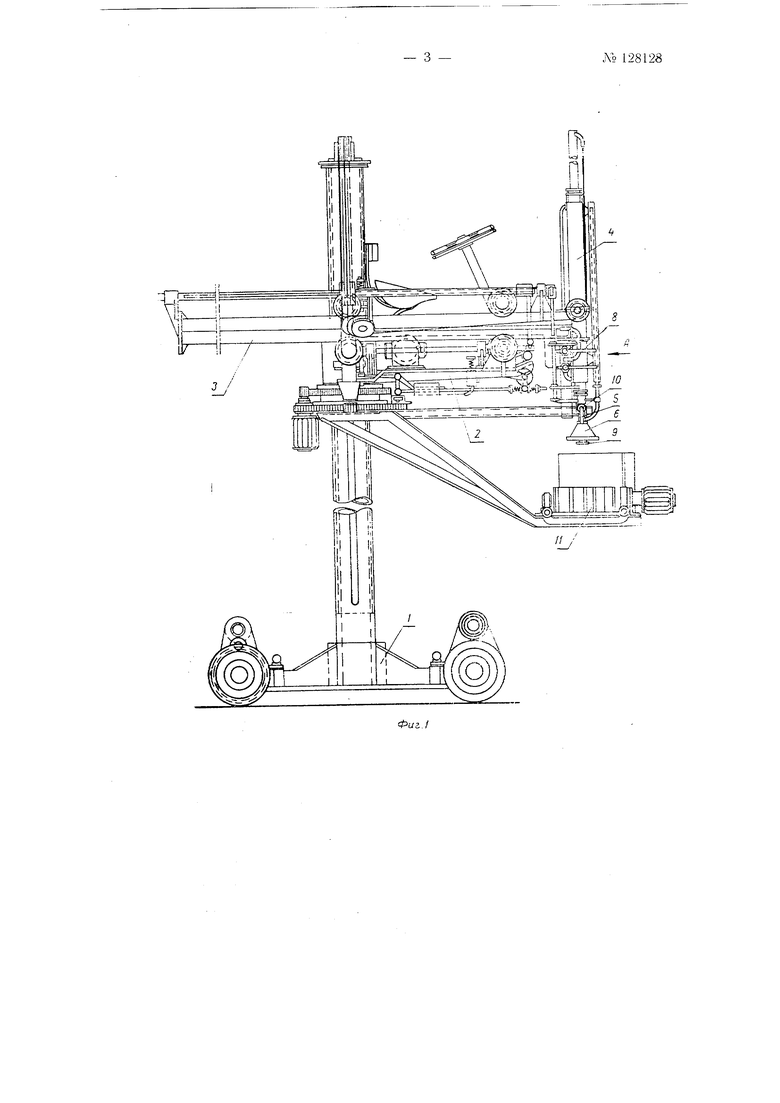
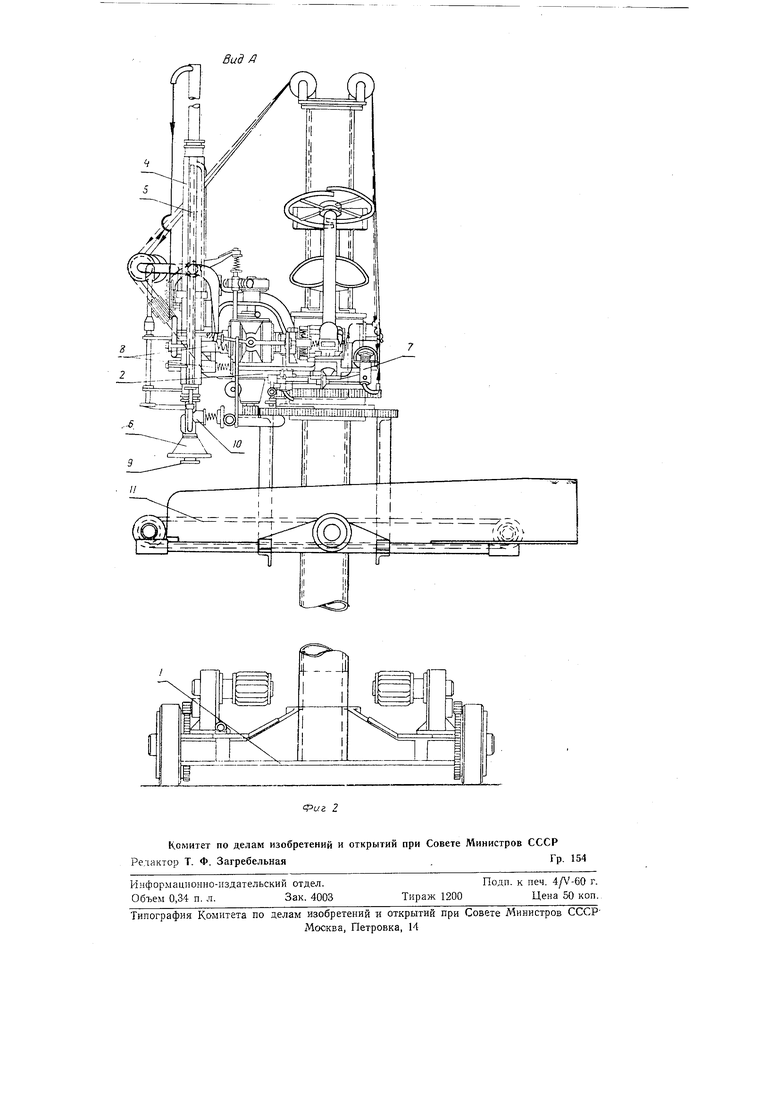
На фиг. 1 изображена передвижная мащина для погрузкн штучных грузов; на фиг. 2 - вид по стрелке А на фиг. 1.
Машина смонтирована на тележке / с трубой, на которой укреплена поворотная платформа 2 с выдвижной рукоятью 5, несущей пневмоцилиндр 4, на щтоке 5 которого смонтирован вакуум-захват 6.
Для производства погрузки машину устанавливают параллельто штабелю на расстоянии, исключающем задевание мещков механизмами машины, после чего вакуум-захват 6 поворотом платформы 2 и перемещением рукояти 3 располагают над серединой мешка, подлежащего перегрузке. Далее, при нажиме на педаль 7 сжатый воздух через золотниковые переключатели 8 подается из магистрали в верхнюю часть пневмоцилиндра 4, вследствие чего вакуум-захват 6 опускается и приN° 128128- 2 -
жимается к мешку. В момент соприкосновения золотниковый переключатель 9 соединяет нолость вакуум-захвата 6 с системой вакуума, а когда разрежение в вакуум-захвате 6 достигнет необходимой величины, сработают золотниковые переключатели 8, сжатый воздух поступит в нижнюю часть пневмоцилиндра 4 и вакуум-захват 6 поднимается EiMeсте с MCHiKOM вверх. После этого рукоять 3 и поворотная Платформа 2 возвращают вакуум-захват в первоначальное положение, в котором он находился перед началом погрузки. При подходе платформы 2 к рукояти 5 к исходному положению золотниковый переключатель 10 сообщает полость вакуум-захвата 6 с атмосферой, в результате чего мешок отрывается и падает на транспортер 11. В этот момент отпускается недаль 7.
Благодаря применению золотниковых переключателей S, 9 и 10, весь цикл - с момента нажима на педаль 7 и опускания вакуум-захвата 6 и до момента отделения мешка - происходит автоматически.
Предмет изобретения
1.Передвижная машина для погрузки штучных грузов, например заполненных бумажных мешков, из штабеля на транспортное устройство с помощью вакуум-захвата, управляемого механизмами перемещения в вертикальном и горизонтальном направлениях, отличающаяся тем, что, с целью увеличения производительности, механизм перемещения вакуум-захвата в горизонтальном направлении смонтирован на поворотной платформе, а последовательность включения в работу меха-, низмов, управляющих вакуум-захватом, осуществлена с помощью системы золотниковых переключателей, включенных в магистраль сжатого воздуха.
2.Форма выполнения мащины по п. 1, отличающаяся тем, что механизм перемещения вакуум-захвата в горизонтальном направлении выполнен в виде выдвижной рукояти, несущей пневмоцилиндр, ;ia щтоке которого смонтирован вакуум-захват.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наклонный лоток для погрузки штучных грузов | 1959 |
|
SU125757A1 |
| Погрузочная машина для штабелирования в железнодорожных вагонах загруженных мешков | 1958 |
|
SU116200A1 |
| Машина для погрузки штучных грузов в вагоны | 1981 |
|
SU962154A1 |
| Устройство для формирования пакетов из штучных грузов | 1983 |
|
SU1081100A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Машина для погрузки штучных грузов в вагоны | 1983 |
|
SU1189769A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| Транспортер-укладчик | 1953 |
|
SU105652A1 |