Изобретение относится к холодной обработке металлов давлением и може быть использовано для подачи полосо вого и ленточного материала в зону обработки.
Цель изобретения - повьпиение надежности работы и долговечности.
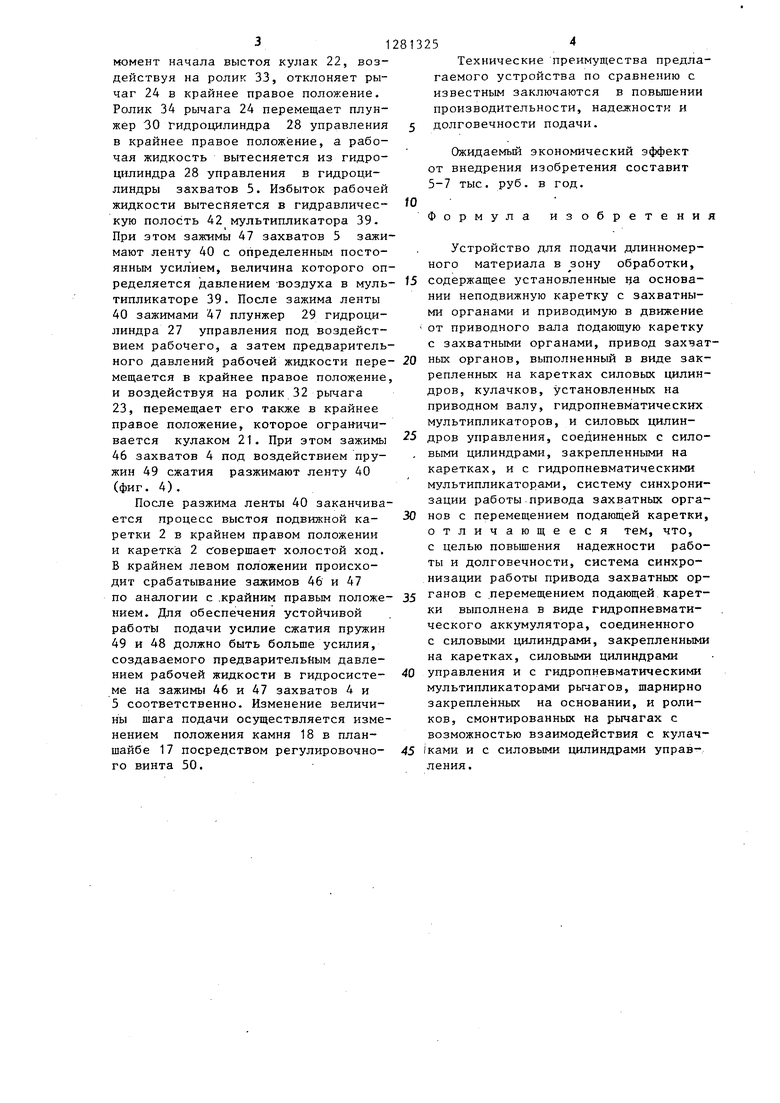
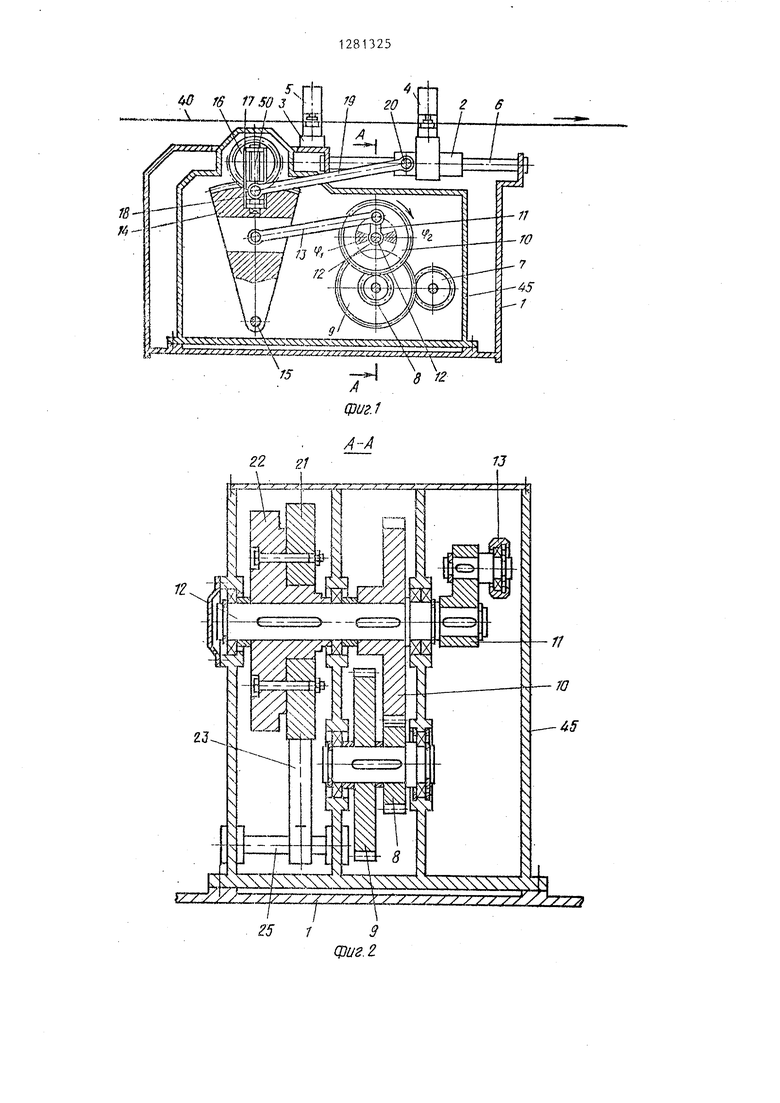
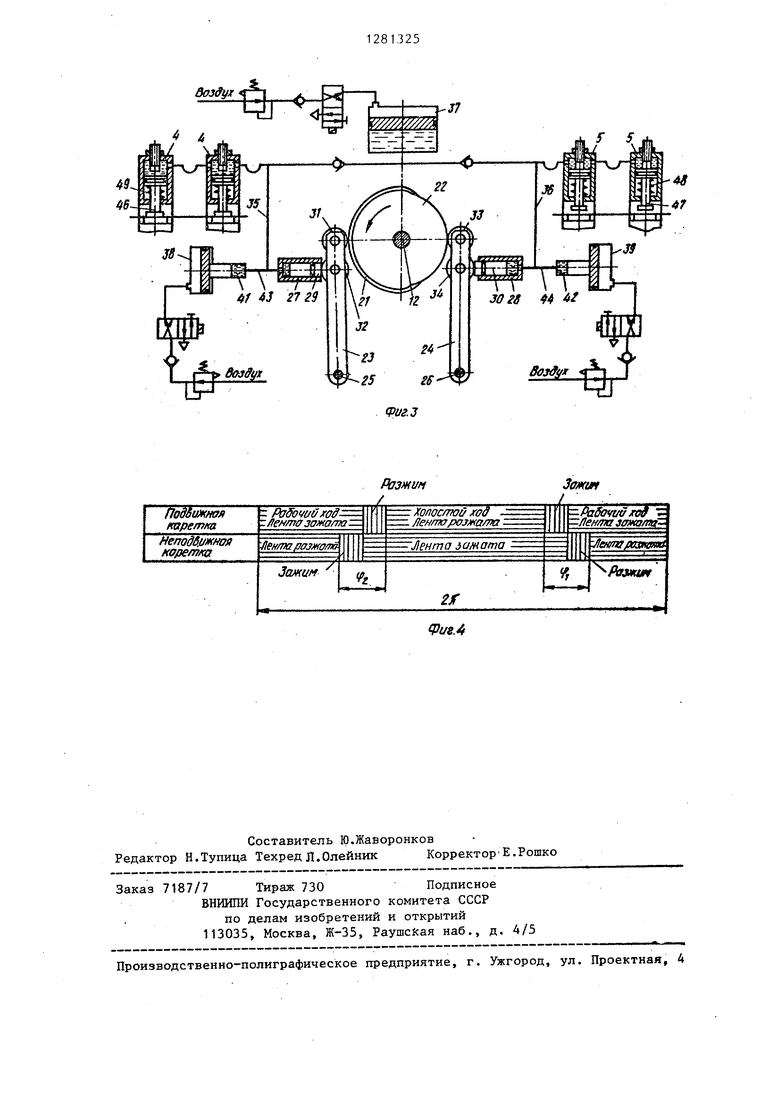
Па фиг, 1 изображено устройство для подачи длинномерного материала в зону обработки;, на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 - схема привода захвгттпых органов; isa фиг. 4 - циклограмма работы устройсва, .
Устройство содержит станину 1, в части которой смонтированы подв -глсная 2 и неподви;кная 3 каретки с захватами 4 и 5 соответственно. Неподвшкиая каретка 3 закреплена на станине 1, а подвижная каретка 2 смонтирована с возможностью возвратно-поступательного перемещения на направляющих колонках 6, закрепленных на станине 1 Л1ри- вол. подвижной каретки 2 содержит зубчатый редуктор, состоядщй из. шее тереи 7 и 8 и колес 9 и 10 и приводимый в движение электродвигателем (не показан), и исполнительный механизм. Последний содержит кривой.ип 11,закрепленный на выходном валу
12редуктора и связанньй рычагом
13с зубчатым сектором 14,смонтиро- па1 чым на оси 15. Сектор 14 сцеплен с шестерней вала-шестер и 16, .Па валу Бала-шестерн.и 16 закреплена план )1. 17, .камень 18 которой связан пос))едство -1 шатуна 19 с шарниром 20 Г1одви/кно 1 каретки 2. Привод захватов 4 н 5 подвижной 2 и неподвил; ной 3 кареток содержит кулаки 21 и 22, закре.пленные на выходном валу
12. редуктора, рнчаги 23 и 24, смонтированные на осях 25 и 26 с возможностью качательного движения, и гидроци1.(И.ндрь 27 и 28 управления с плу гаерами 29 и 30. На конце рычага 23 смонтированы ролики 31 и 32, а на конце рычага 24 - ролики 33 и 34. Ролики 31 и 33 контактируют с кулаками 21 и 22 соответственно, а 1;опики 32 и 34 - с плунжерами 29 и 30 гидро1далиндров 27 и 28 управления соответственно. Гидроцилиндры 27 и 28- управления сообщены гидро- магистралями 35 и 36 с гидроцилиндрами, захватов 4 и 5 соответственно. Гидропневматический аккумуля
5
0
5
0
5
0
5
0
5
тор 37 давления служит для создания предварительного давления в гидросистеме и компенсации утечек рабочей жидкости. Гидропневматические мультипликаторы 38 и 39 предназначены для создания определенного и постоянного усилия Зс1жима ленты 40 захватами 4 и 5 соответственно. Гидравлические полости 41 и 42 мультипликаторов 38 и. 39 сообщены .гидромагистралями 35 и 36 с гидроцилиндрами захватов 4 и 5 соответственно, а гидромагистралями 43 и 44 - с гидроцилиндрами 27 и 28 управления соответственно.Приводы подвижной каретки 2 и захватов 4 и 5 смоптированы в общем корпусе 45. Устройство также содержит зажимы 46 и 47, пружины 48 и 49, регулировочный винт 50.
Устройство работает следующим образом.
Вращение кривошипа 11 трансформируется в возвратно-поступательное движение подвижной каретки 2 с выс- тоями в крайних положениях. Выстоян подвижной каретки 2 в крайних положениях соответствуют углы поворота . кривошипа Ч и Ч . При рабочем ходе подвижной каретки 2 рычаг 23 под воздействие м кулака 21 на ролик 31 находится в крайнем левом (фиг. 3) положении. Плунжер 29 гидроцилиндра 27 управления находится также,в крайнем левом положении, а рабочая жидкость вытеснена из гидроцилиндра 27 управления в гидроцилиндры захватов 4. Избыток рабочей жидкости вытеснен в гидравлическую полость 41 мультипликатора 38. При этом за5кимь 46 захватов 4 зажимают лент.у 40 с определенным постоянным усилием,.величина которого определяется давлением воздуха в мультипли- каторе 38. Плунжер 30 гидроцилиндра 28 управления под воздейотвием предварительного давления рабочей иа-1дкости в гидросистеме находится в крайнем левом положении и воздействует на ролик 34 рьгаага 24, последний также находится в крайнем ле- вом положении, которое ограничивается кулаком 22. При этом зажимы 47 захватов 5 под воздействием пружин 48 сжатия находятся в разжатом положении.При подходе подвижной каретки 2 к крайнему правому положению - в
момент начала выстоя кулак 22, воздействуя на ролик 33, отклоняет рычаг 24 в крайнее правое положение. Ролик 34 рычага 24 перемещает плунжер 30 гидроцилиндра 28 управления в крайнее правое положение, а рабочая жидкость вытесняется из гидроцилиндра 28 управления в гидроцилиндры захватов 5. Избыток рабочей жидкости вытесняется в гидравлическую полость 42 мультипликатора 39. При этом заясимы 47 захватов 5 зажимают ленту 40 с определенным постоянным усилием, величина которого определяется давлением -воздуха в мультипликаторе 39. После зажима ленты 40 зажимами 47 плунжер 29 гидроцилиндра 27 управления под воздействием рабочего, а затем предварительного давлений рабочей жидкости перемещается в крайнее правое положение и воздействуя на ролик 32 рычага 23, перемещает его также в крайнее правое положение, которое ограничивается кулаком 21. При этом зажимы 46 захватов 4 под воздействием пружин 49 сжатия разжимают ленту 40 (фиг. 4).
После разжима ленты 40 заканчивается процесс выстоя подвижной каретки 2 в крайнем правом положении и каретка 2 совершает холостой ход. В крайнем левом положении происходит срабатывание зажимов 46 и 47 по аналогии с .крайним правым положе- нием. Для обеспечения устойчивой работы подачи усилие сжатия пружин 49 и 48 должно быть больше усилия, создаваемого предварительным давлением рабочей жидкости в гидросистеме на зажимы 46 и 47 захватов 4 и 5 соответственно. Изменение величины шага подачи осуществляется изменением положения камня 18 в планшайбе 17 посредством регулировочного винта 50.
0
5
5
0
5
0
0
5
Технические преимущества предлагаемого устройства по сравнению с известным заключаются в повышении производительности, надежности и долговечности подачи.
Ожидаемый экономический эффект от внедрения изобретения составит 5-7 тыс. руб. в год.
Формула изобретения
Устройство для подачи длинномерного материала в зону обработки, содержащее установленные ца основании неподвижную каретку с захватными органами и приводимую в движение от приводного вала подающую каретку с захватными органами, привод захватных органов, выполненный в виде закрепленных на каретках силовых цилиндров, кулачков, установленных на приводном валу, гидропневматических мультипликаторов, и силовых цилиндров управления, соединенных с силовыми цилиндрами, закрепленными на каретках, и с гидропневматическими мультипликаторами, систему синхронизации работы привода захватных органов с перемещением подгиощей каретки, отличающееся тем, что, с целью повышения надежности работы и долговечности, система синхронизации работы привода захватных органов с перемещением подающей каретки выполнена в виде гидропневматического аккумулятора, соединенного с силовыми цилиндрами, закрепленными на каретках, силовыми цилиндрами управления и с гидропневматическими мультипликаторами рьиагов, шарнирно закрепленных на основании, и роликов, смонтированных на рычагах с возможностью взаимодействия с кулач- 1ками и с силовыми цилиндрами управления.
ftO Г6 П 50 J
II 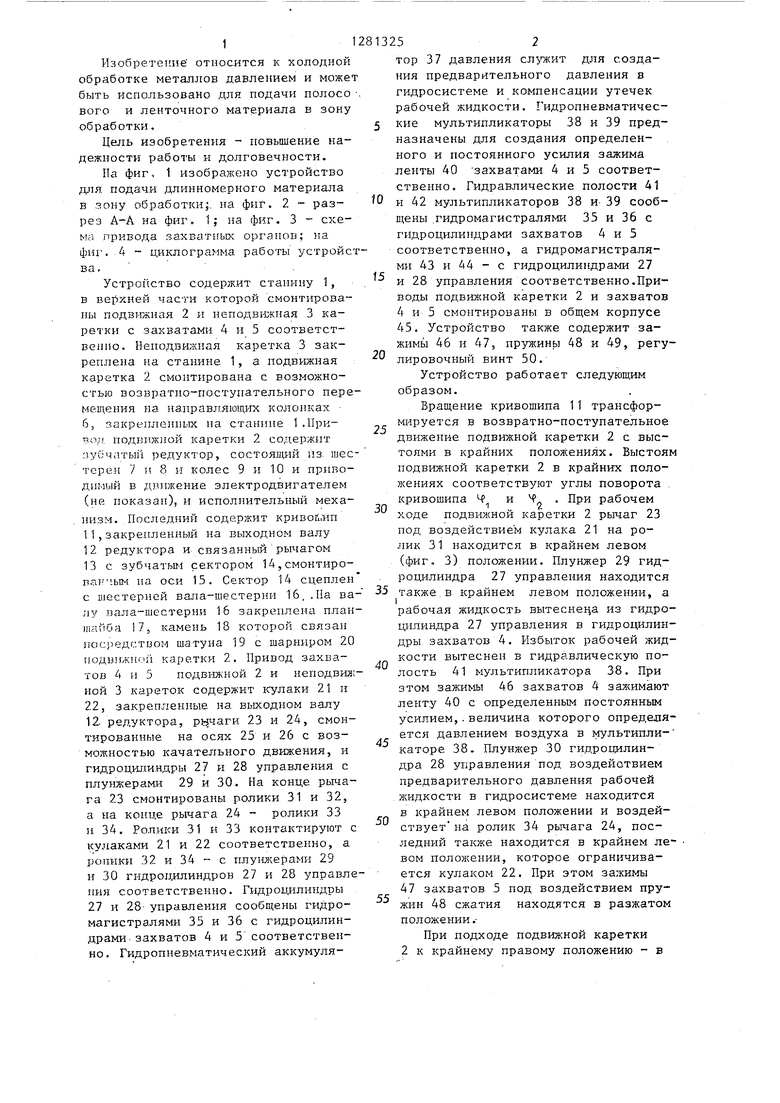
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Способ обработки длинномерного проката и автоматический комплекс для его осуществления | 1987 |
|
SU1625557A1 |
| Гидропривод управления рабочим органом землеройной машины | 1984 |
|
SU1263774A1 |
| Устройство для гидромеханического формообразования изделий | 1989 |
|
SU1639863A1 |
| СТРУГОВАЯ УСТАНОВКА | 1995 |
|
RU2122636C1 |
| Система управления положением остова транспортного средства | 1985 |
|
SU1324872A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Гидравлический пресс | 1984 |
|
SU1220806A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
Изобретение относится к области холодной обработки металлов давлением и может быть использовано для пп- дачи длинномерного материала в зону обработки. Целью изобретения является повьшение надежности работы и долговечности. Гидроцилиндры управления сообщены гидромагистралями с гидроцилиндрами захватов.Гидропневматический аккумулятор давления служит для создания предварительного давления в гидросистеме и компенса ции утечек рабочей жидкости. Гидропневматические мультипликаторы предназначены для создания определенного и постоянного усилия зажима леи- ты. 4 ил. г (Л ND х Чо
Составитель Ю.Жаворонков Редактор Н.Тупица Техред Л.Олейник Корректор Е.Рошко
Заказ 7187/7 Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушс1сая наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Разниц /
Зато
| Авторское свидетельство СССР № 755384, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
