1
Изобретение относится к области обработки сыпучих материалов, а именно к устройствам для дозированной подачи материалов;, подлежащих формованию, и м ожет быть использовано в отраслях промьгашенности, связанных с изготовлением изделий, сырьем для которых служат сыпучие материалы: пластмассовые детали из пресс-порошка, резинотехнические изделия, таб- летированные лекарственные препараты и т.п.
Целью изобретения является улучшение эксплуатационных характеристик путем повьшения точности дозировки при одновременной загрузке многосекционной емкости.
На фиг.I .изображен робот-манипулятор для загрузки многосекционной емкости сыпучим материалом, общий вид} на фиг.2 - разрез А-А на фиг,I; на фиг.З - разрез Б-Б на фиг.9; на фиг.4 - робот-манипулятор, вид сверху; на фиг.5 - вид В на фиг.1; на . фиг. 6 - разрез Г-Г на фиг. 9; на4)Иг.7-1 разрез Д-Д на фиг.9; на фиг.8. - разрез Е-Е на фиг.9; на фиг.9 - вид Ж на фиг,1.
Манипулятор содержит станину , на которой в колонне 2 установлен вал 3 (фиг.1) Вал 3 соединен с рычагом 4, Который пальцем 5 связан со штоком 6 пневмоцилиндра 7 (фиг.2). Пневмоцилиндр 8 развернут торцом к пневмоцилиндру 7 и связан с ним. Шток пневмоцилиндра 8 пальцем 9 связан со станиной 1. На верхнем конце вала 3 размещена платформа 10 со стрелой II, С платформой 10 связана также направляющая штанга 12. На основании 10 размещен многопозиционный, например 3-позиционный, пнев- моцилиндр 13, шток которого поводком 14 соединен со стрелой 1 и штангой 12 (4иг.1 и 4). На руке 11 и штанге 12 размещен корпус 15 весового дозирующего устройства (фиг.1), В отверстиях стенок корпуса 15 установлена ось 16, на которой поворотно установлено коромь1Сло 17 (фиг. 6 и 9), Коромысло 17 представляет собой двуплечий рычаг. На одном из концов коромысла 17 закреплен многосекционный (например, шестисекционный) бункерный захват 18 (фиг. 1 и 4). Бункерный захват снабжен шторками 19 и механизмом открывания шторок, выполненным в виде пневмоцилиндра 20 и
1281399
шарнирно-рычажной системы 21 (фиг.4), связывающей шток пневмоцилиндра 20 и шторки 19, На другом плече,коромысла i 7 вдоль него закреплена основ- ная штанга 22 (фиг,6). На штанге 22 с помощью винта 23 укреплен груз 24. На коромысле 17 также закреплен флажок 25 датчика массы навески,
Датчики 26 грубой и 27 точной навески пресс-порошка размещены на кронштейне 28, укрепленном на руке I 11, В корпусе 15 весового дозирующе- го устройства размещен регулятор ;
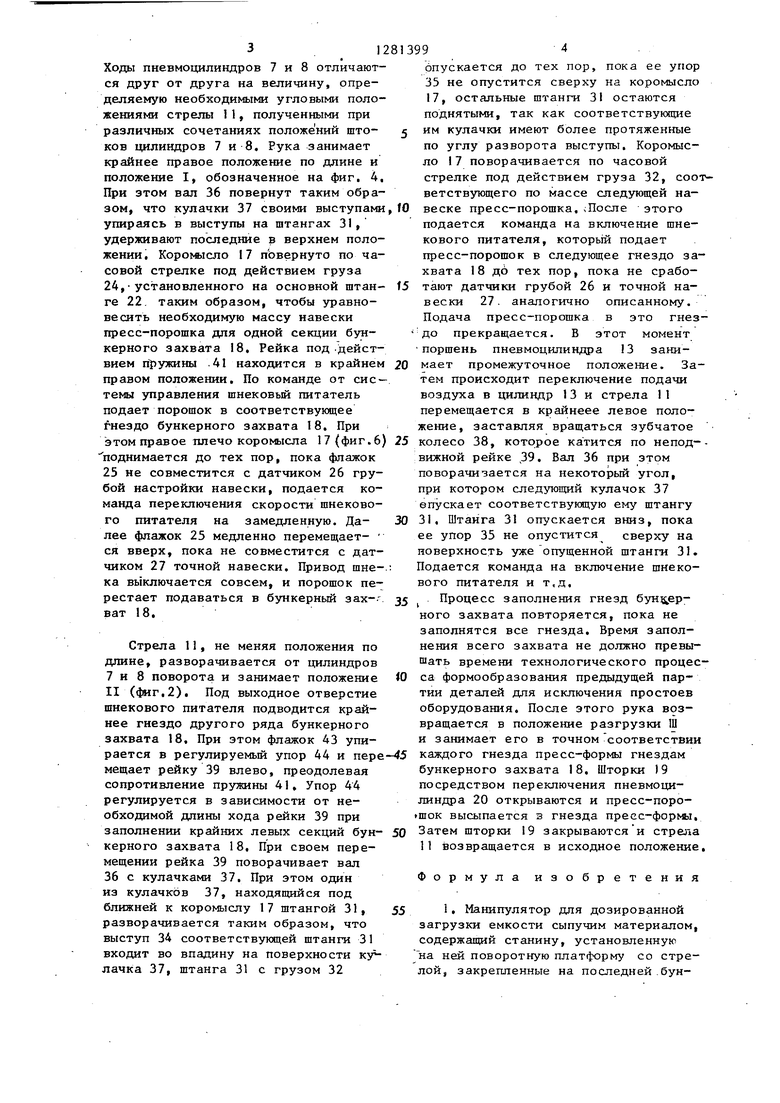
29 плавности качания, шток 30 которого связан с коромыслом 17, На оси 16 параллельно коромыслу 17 установлены штанги 31 с грузами 32 (фиг.9). Грузы 32 закреплены на штангах с
помощью винтов 33. Штанги 31 выполнены с выступами 34 и пластинами- упорами 35, В корпусе 15 весового дозирующего устройства закреплен кулачковый вал 36,на котором размещены кулачки 37 (фиг, 6-9). Каждый
кулачок размещен под своей Ътангой
31, при этом выступы 34 штанг 31
упираются в кулачки 37. Профильные
поверхности кулачков 37 развернуты
так, что начало выступов на всех кулачках совпадает, а угол выступа каждого кулачка отличается от предыдущего на постоянную величину, onpet ; деляемую ходом руки 11, На конце
вала 36 размещено зубчатое колесо 38, находящееся в зацеплении с зубчатой рейкой 39 (фиг.1). Рейка 39 размещена в проушинах корпуса 15 весового дозирующего устройства и зафиксирована от проворота шпонкой 40. На рейке 39 размещена пружина 41 сжатия, упирающаяся одним концом в проушину корпуса 15, а другим - в кольцо 42, размещенное на рейке 39 (фиг,5). На
конце рейки 39 закреплен флажок 43. На колонне 2 закреплен регулируемый упор 44 для взаимодействия с флажком 43,
Манипулятор работает следующим
образом.
Посредством подачи сжатого воздуха в соответствующие полости пневмо- цилиндров 7 и 8 (фиг.2).для поворота стрелы 11 и пневмоцилиндра 12 про- . дольного перемещения стрелы 1I одно из внешних гйезд бункерного зах ватй 18 подводится под выходное отверстие ш:некового питателя (не показано). Шторки бункерного захвата 18 закрыты.
Ходы пневмоцилиндров 7 и 8 отличаются друг от друга на величину, определяемую необходимыми угловыми положениями стрелы I1, полученными при различных сочетаниях положе ний што- ков цилиндров 7 и 8. Рука занимает крайнее правое положение по длине и положение I, обозначенное на фиг, 4 При этом вал 36 повернут таким образом, что кулачки 37 своими выступами упираясь в выступы на штангах 31, удерживают последние в верхнем положении. 17 повернуто по часовой стрелке под действием груза 24,-установленного на основной штан- ге 22. таким образом, чтобы уравновесить необходимую массу навески пресс-порошка для одной секции бункерного захвата 18, Рейка под .действием п1)ужины .41 находится в крайнем правом положении. По команде от системы управления шнековьй питатель подает порошок в соответствующее Гнездо бункерного захвата 18, При этом правое плечо коромысла 17 (фиг.6 поднимается до тех пор, пока флажок 25 не совместится с датчиком 26 грубой настройки навески, подается команда переключения скорости шнеково- го питателя на замедленную. Да- лее флажок 25 медленно перемещает- ся вверх, пока не совместится с датчиком 27 точной навески. Привод шнека выключается совсем, и порошок перестает подаваться в бункерный зах-. ват 18,
Стрела 11, не меняя положения по длине, разворачивается от цилиндров 7 и 8 поворота и занимает положение II (фиг,2), Под выходное отверстие шнекового питателя подводится крайнее гнездо другого ряда бункерного захвата 18, При этом флажок 43 упирается в регулируемый упор 44 и пере мещает рейку 39 влево, преодолевая сопротивление пружины 41, Упор 44 регулируется в зависимости от необходимой длины хода рейки 39 при заполнении крайних левых секций бун- керного захвата 18, При своем перемещении рейка 39 поворачивает вал 36 с кулачками 37, При этом один из кулачков 37, находящийся под ближней к коромыслу 17 штангой 31, разворачивается таким образом, что выступ 34 соответствующей штанги 31 входит во впадину на поверхности ку - лачка 37, штанга 31 с грузом 32
опускается до тех пор, пока ее упор 35 не опустится сверху на коромысло 17, остальные штанги 31 остаются поднятыми, так как соответствующие им кулачки имеют более протяженные по углу разворота выступы. Коромысло 17 поворачивается по часовой стрелке под действием груза 32, сооветствующего по массе следующей навеске пресс-порошка, .;После этого подается команда на включение шнекового питателя, которьш подает пресс-порошок в следующее гнездо захвата 18 до тех пор, пока не сработают датчики грубой 26 и точной навески 27. аналогично описанному. Подача пресс-порошка в это гнез до прекращается. В этот момент поршень пневмоцилиндра 13 занимает промежуточное положение. Затем происходит переключение подачи воздуха в цилиндр 13 и стрела 11 перемещается в крайнеее левое положение, заставляя вращаться зубчатое колесо 38, которое катится по неподвижной рейке 39, Вал 36 при этом поворачизается на некоторый угол, при котором следующий кулачок 37 впускает соответствующую ему штангу 31, Штанга 31 опускается вниз, пока ее упор 35 не опустится сверху на поверхность уже опущенной штанги 31. Подается команда на включение шнекового питателя и т.д,
. Процесс заполнения гнезд ного захвата повторяется, пока не заполнятся все гнезда. Бремя заполнения всего захвата не должно превышать времени технологического процесса формообразования предыдущей партии деталей для исключения простоев оборудования. После этого рука возвращается в положение разгрузки Ш и занимает его в точном соответствии каждого гнезда пресс-формы гнездам бункерного захвата 18, Шторки 19 посредством переключения пневмоцилиндра 20 открываются и пресс-поро- (ШОК высыпается з гнезда пресс-формы. Затем шторки 19 закрываются и стрела 11 возвращается в исходное положение
Формула изобретения
1, Манипулятор для дозированной загрузки емкости сыпучим материалом, содержащий станину, установленную на ней поворотную платформу со стрелой, закрепленные на последней .бун
512
керный захват и дозирукяцее устройство, включающее в с«бя установленные в корпусе и связанные с бункерным захватом коромысло и штангу с грузом и датчик массы, отличающийс я тем, что, с целью улучшения эксплуатационных характеристик путем повьппения точности дозировки при одновременной загрузке многосекционной емкости, дозирующее устройство снабжено дополнительными штангаьш с грузами, основная и дополнительные штанги шарнирно установлены на оси коромысла с возможностью взаимодействия друг с другом и коромыслом по- средством консольно закрепленных на них пластин, а под штангами в корпу
9
6
се смонтирован вал с кулачками, установленными с возможностью взаимо-- действия каждый с соответствзлощей штангой и зубчатым колесом, при этом на платформе смонтирована с возможностью взаимодействия с зубчатым колесом подпружиненная в горизонталь ном направлении рейка и с возмож-), ностью взаимодействия с последней - упор, бункерный захват выполнен секционным, а стрела установлен с возможностью горизонтального перемещения параллельно рейке,
2, Манипулятор по п.1, о тли - чающийся тем, что грузы на штангах установлены с возможностью перемещения по ним.
18 20
I
с
2/
19
VLLZ.I
Ь л
/
(Риг.5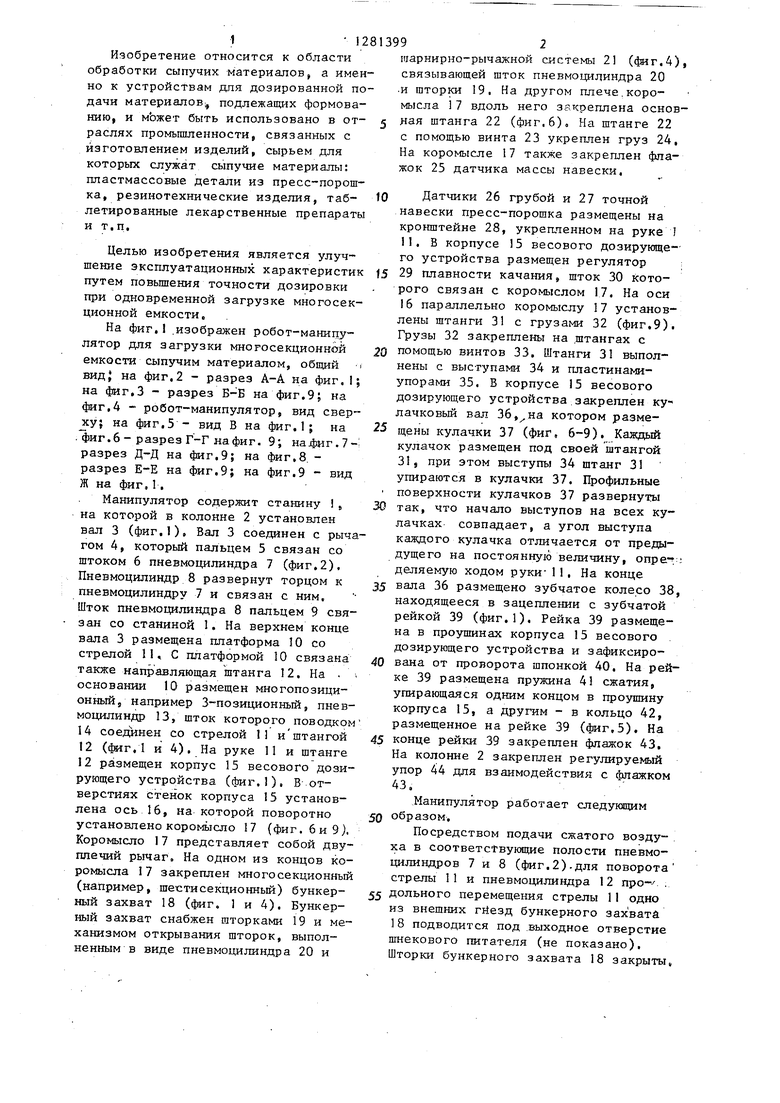
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1985 |
|
SU1296398A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| Линия для нанесения многослойных покрытий на мелкие изделия насыпью | 1981 |
|
SU957988A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Сборочный автомат | 1988 |
|
SU1549714A1 |


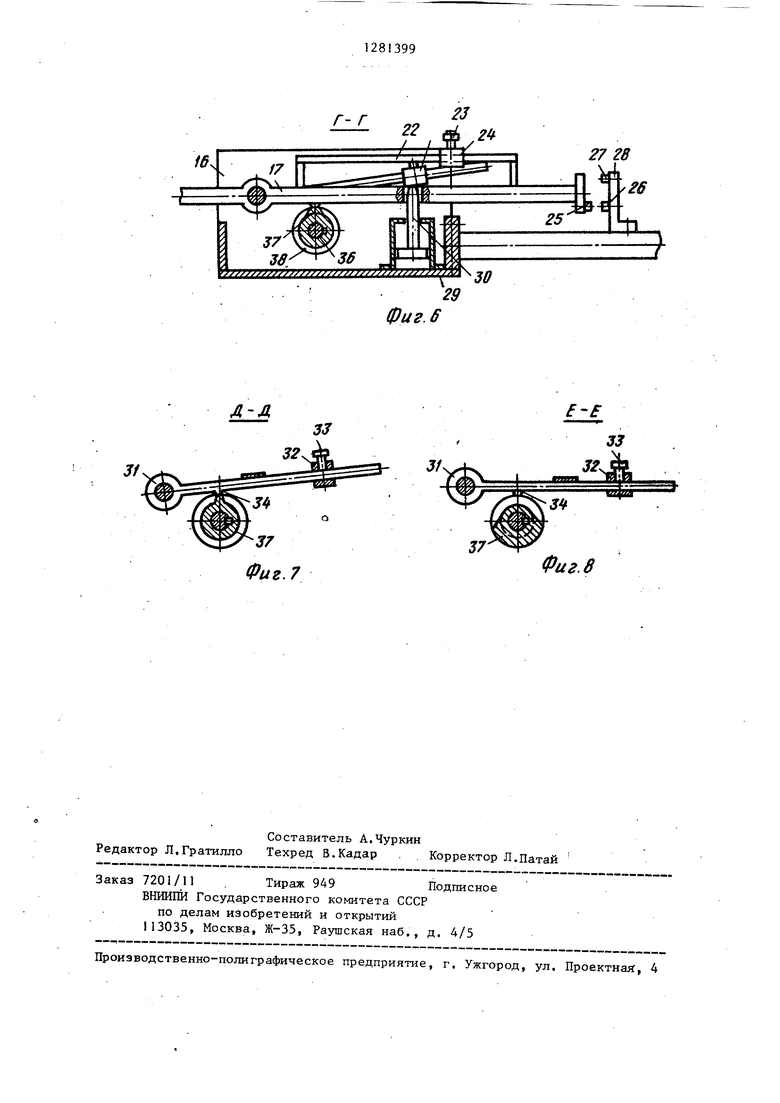
Изобретение относится к манипуляторам для дозированной загрузки емкости сыпучим материалом и позволяет улучшить эксплуатационные характеристики путем, повьшения точности дозировки при одновременной загрузке многосекционной емкости. На станине установлена поворотная стрела I1 с бункерным захватом, который связан с коромыслом 17 и штанга{«1 31 с гру; зами 32. Штанги 31 установлены на , оси коромысла 17 и имеют консольные пластины 35. Под штангами размещен вап 36 с кулачками и зубчатым колесом 38 для взаимодействия с рейкой 39. Кулачки, своими выступами упираясь в выступы на штангах 31, Удерживают последние в верхнем положении. При горизонтальном движении захвата рейки 39 перемещается и поворачивает вап 36 с кулачками. Один из кулачков, находящихся под ближней к коромыслу 17 штангой 31, разворачивается так, что выступ входит во впадину кулачка, штанга 31 с грузом 32 опускается до тех пор, пока пластина 35 не опустит- сй на коромысло 17, которое поворачивается по часовой стрелке под.дейст- вием груза 32, соответствующего по массе следукщей навеске сыпучего материала. 1 з.п, ф-лы, 9 ил. i (Л Buff/К . У/ ,f,32 J/V г Г лЕ 31л 3839 32 32 ° Риг. 9 И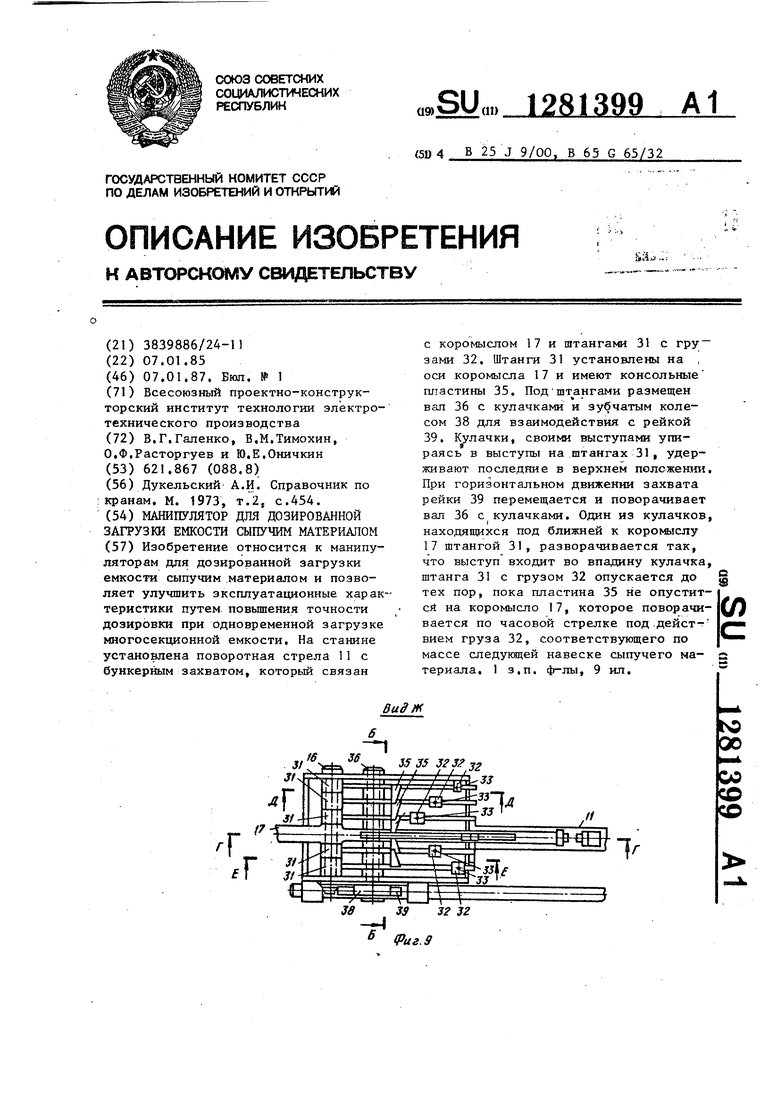
фиг л
ид В
Фиг. 5
27 28
26
Л Д
фиг. 6
e-f
Фиг. 8
| Дукельский А.И | |||
| Справочник по ; кранам | |||
| М | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
