10
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, и может быть использовано для различных технологических и погру- зочно-разгрузочных работ.
Целью изобретения является уменьшение габаритов и упрош.ение конструкции за счет выполнения приводного механизма в виде единой резинокордной оболочки, разделенной узлами крепления на изолированне камеры, и повышение надежности за счет предохранения резинокордной оболочки.
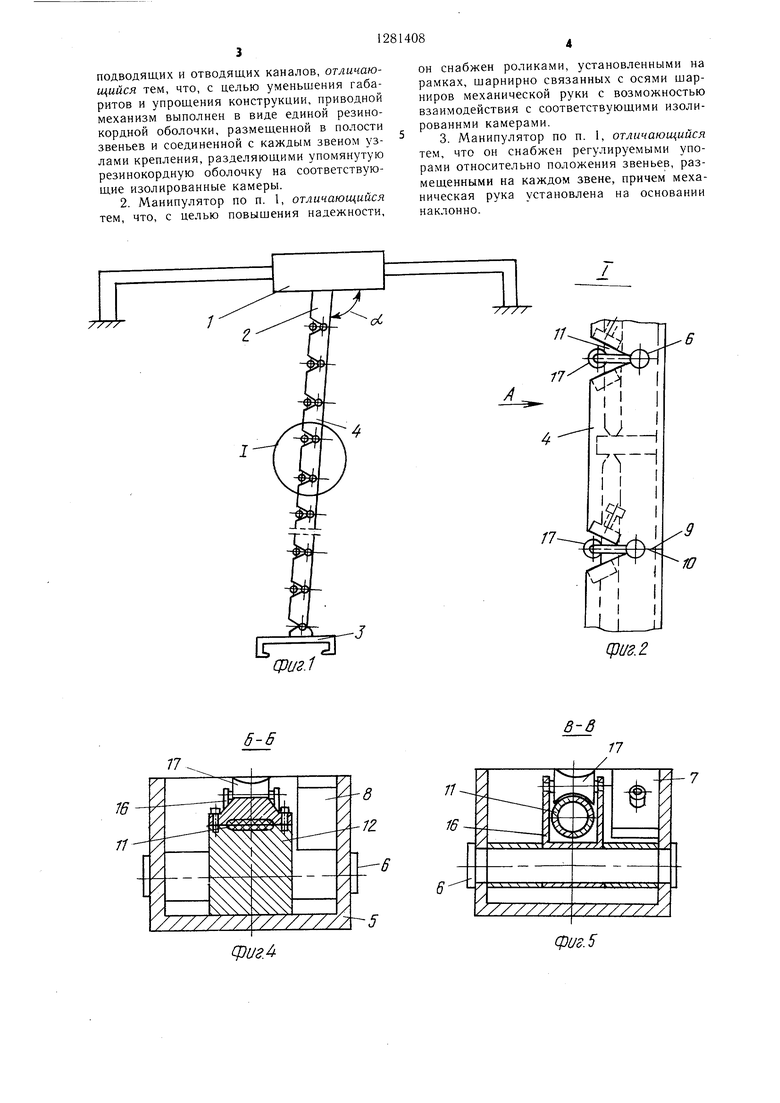
На фиг. 1 показан манипулятор, общий вид; на фиг:2 - узел I на фиг.1; на фиг.З - вид А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - разрез В-В на фиг.З; на фиг.6 - схема положений полых 15 звеньев механической руки при ступенчатом перемешении грузов.
Манипулятор содержит основание 1, установленную на нем механическую руку 2 с рабочим органом 3. Механическая рука состоит из полых звеньев 4, имеющих корпус 5, выполненный в виде, например, трапеции, параллеле 1ипеда и т. п., шарнирно соединенных посредством шарниров 6, при этом на каждом корпусе 5 полого звена 4 с одной стороны установлен регулируемый упор 7 относительного положения звеньев, а с другой имеется выступ 8 для взаимодействия с регулируемым упором 7 смежного полого звена 4.
Пара смежных полых звеньев 4 механической руки взаимодействует между собой но 30 поверхностям 9 и 10. Приводной механизм выполнен в виде единой резинокордной оболочки 11, размещенной в полости звеньев, соединенной с каждым полым звеном узлами 12 крепления, разделяющими резинокордТакое расположение механической руки 2 относительно основания 1 является наиболее рациональным для конструкции манипулятора, так как для приведения в исходное положение механической руки 2 используются силы гравитации.
При другом расположении механической руки 2 требуются дополнительные средства для приведения их в исходное положение, что усложняет конструкцию манипулятора.
Ступенчатое перемещение рабочего органа 3 осуществляется первоначально снизу вверх при определенной последовательности и количестве работающих изолированных камер 13 резинокордной оболочки 11, причем для каждой пары полых звеньев 4 устанав- :и1вается посредством регулируемых упоров 7 относительного положения звеньев и выступов 8 определенный угол относительного поворота корпусов 5 (углы PI, р2, рз,-.., РП на фиг.6), чем обеспечиваются равные перемещения рабочего органа 3 по высоте. Например, при перемещении рабочего органа 3 из положения I в II (фиг.6) рабочая среда подается по подводящему каналу 14 в изолированную камеру 13 резинокордной оболочки И, которая сокращается по длине благо- 25 даря конструкции резинокордной оболочки 11, и через узлы 12 крепления воздействует на полые звенья, 4, заставляя их повернуться на шарнире 6 один относительно другого на угол Рь При этом ролик 1 изгибает резинокордную оболочку 11, не давая ей Г5ЫЙТИ при сокращении длины за первоначальные габариты механической руки 2. Подвижная рамка 16 служит для установки ролика 17 в наилучщее положение при взаимодействии его с резинокордной оболочкой 11 каждой изолированной камеры 13. Регули20
ную оболочку на соответствующие изолиро-35 руемый упор 7 прижимается к выступу 8, в
ванные камеры 13. Каждая изолированнаярезультате пара смежных полых звеньев 4
камера 13 соединена с источником рабо-образует жесткую конструкцию, устанавличей среды (не показан) посредством подво-вающую рабочий орган 3 на следующий уродящих
14 и отводящих каналов 15. На рамках 16, шарнирно связанных с ося- 40
ми шарниров 6, установлены ролики 17 так, что резинокордная оболочка 11 проходит между шарнирами 6 и роликами 17. Механическая рука 2 установлена на основании наклонно.
Манипулятор работает следующим образом.
В исходном положении механическая рука 2 свободно повисает, опираясь на основание 1, так как под действием сил гравитации каждое полое звено 4 поворачивается на щарнире 6 относительно предыдущего полого звена 4 до соприкосновения поверхностей 9 и 10. Такому повороту способствуют массы полых звеньев 4, расположенных ниже последних, совершающих поворот, и наклонное расположение механической руки 2. При этом обеспечивается надежное силовое замыкание поверхностей 9 и 10.
вень, и т. д.
При отключении изолированной камеры 13 резинокордной оболочки 11 рабочая среда отводится по отводящему каналу 15. Приводной механизм выполненный в виде резинокордной оболочки, позволяет увеличить усилия, приложенные к соседним полым 45 звеньям механической руки в 2-3 раза в случае применения резинокордной оболочки с расположением нитей корда под углом 15- 40° к продольной оси оболочки (угол 7 на фиг.З).
50
Формула изобретения
1.Манипулятор, содержащий основание, установленную на нем механическую руку с рабочим органом, состоящую из шарнирно соединенных полых звеньев, приводной меха- 55 низм, включающий изолированные камеры, соединенные с звеньями узлами крепления и с источником рабочей среды посредством
5
0
Такое расположение механической руки 2 относительно основания 1 является наиболее рациональным для конструкции манипулятора, так как для приведения в исходное положение механической руки 2 используются силы гравитации.
При другом расположении механической руки 2 требуются дополнительные средства для приведения их в исходное положение, что усложняет конструкцию манипулятора.
Ступенчатое перемещение рабочего органа 3 осуществляется первоначально снизу вверх при определенной последовательности и количестве работающих изолированных камер 13 резинокордной оболочки 11, причем для каждой пары полых звеньев 4 устанав- :и1вается посредством регулируемых упоров 7 относительного положения звеньев и выступов 8 определенный угол относительного поворота корпусов 5 (углы PI, р2, рз,-.., РП на фиг.6), чем обеспечиваются равные перемещения рабочего органа 3 по высоте. Например, при перемещении рабочего органа 3 из положения I в II (фиг.6) рабочая среда подается по подводящему каналу 14 в изолированную камеру 13 резинокордной оболочки И, которая сокращается по длине благо- 5 даря конструкции резинокордной оболочки 11, и через узлы 12 крепления воздействует на полые звенья, 4, заставляя их повернуться на шарнире 6 один относительно другого на угол Рь При этом ролик 1 изгибает резинокордную оболочку 11, не давая ей Г5ЫЙТИ при сокращении длины за первоначальные габариты механической руки 2. Подвижная рамка 16 служит для установки ролика 17 в наилучщее положение при взаимодействии его с резинокордной оболочкой 11 каждой изолированной камеры 13. Регули0
вень, и т. д.
При отключении изолированной камеры 13 резинокордной оболочки 11 рабочая среда отводится по отводящему каналу 15. Приводной механизм выполненный в виде резинокордной оболочки, позволяет увеличить усилия, приложенные к соседним полым звеньям механической руки в 2-3 раза в случае применения резинокордной оболочки с расположением нитей корда под углом 15- 40° к продольной оси оболочки (угол 7 на фиг.З).
50
Формула изобретения
1.Манипулятор, содержащий основание, установленную на нем механическую руку с рабочим органом, состоящую из шарнирно соединенных полых звеньев, приводной меха- низм, включающий изолированные камеры, соединенные с звеньями узлами крепления и с источником рабочей среды посредством
подводящих и отводящих каналов, отличающийся тем, что, с целью уменьшения габаритов и упрощения конструкции, приводной механизм выполнен в виде единой резино- кордной оболочки, размещенной в полости звеньев и соединенной с каждым звеном узлами крепления, разделяющими упомянутую резинокордную оболочку на соответствующие изолированные камеры.
2. Манипулятор по п. 1, отличающийся тем, что, с целью повыщения надежности.
он снабжен ро.тиками, установленными на рамках, шарнирно связанных с осями щар- ниров механической руки с возможностью взаимодействия с соответствующими изоли- рованнми камерами.
3. Манипулятор по п. 1, отличающийся тем, что он снабжен регулируемыми упорами относительно положения звеньев, размещенными на каждом звене, причем механическая рука установлена на основании наклонно.
(Pf/S.f
сриг.2.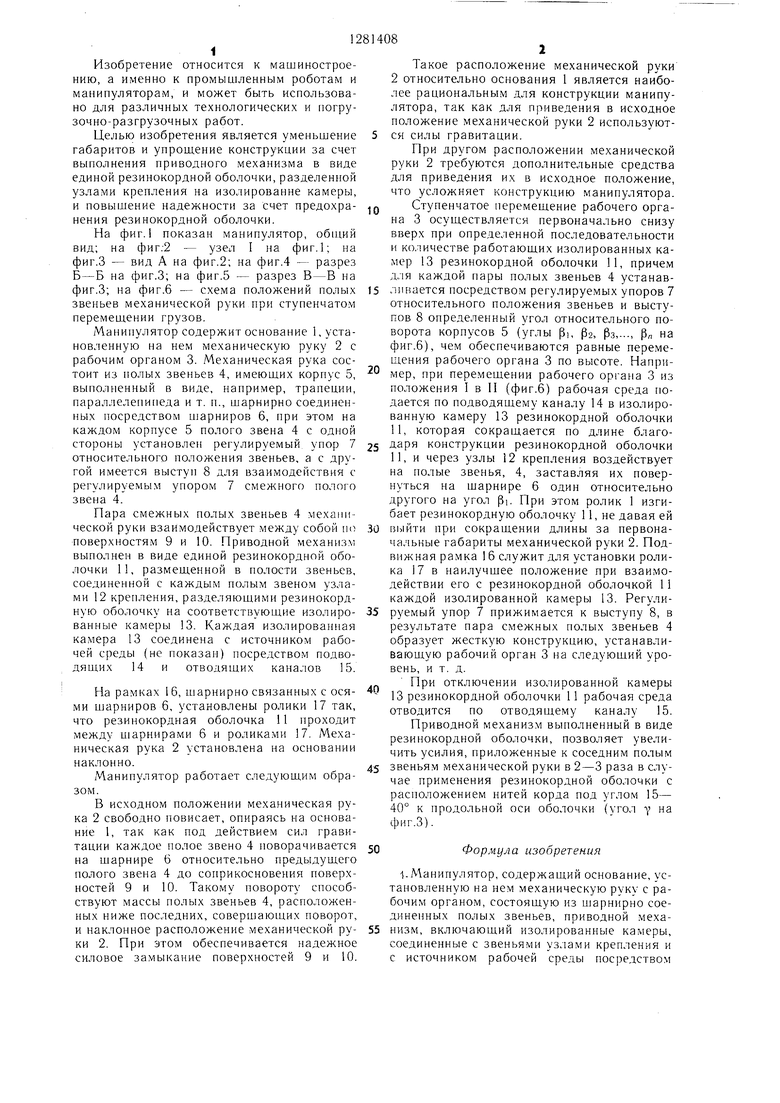
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1990 |
|
SU1754435A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| УСТРОЙСТВО ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2448029C1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| СИСТЕМА КРЕПЛЕНИЯ БОРТОВОГО МНОГОЗВЕННОГО МАНИПУЛЯТОРА КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2086480C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
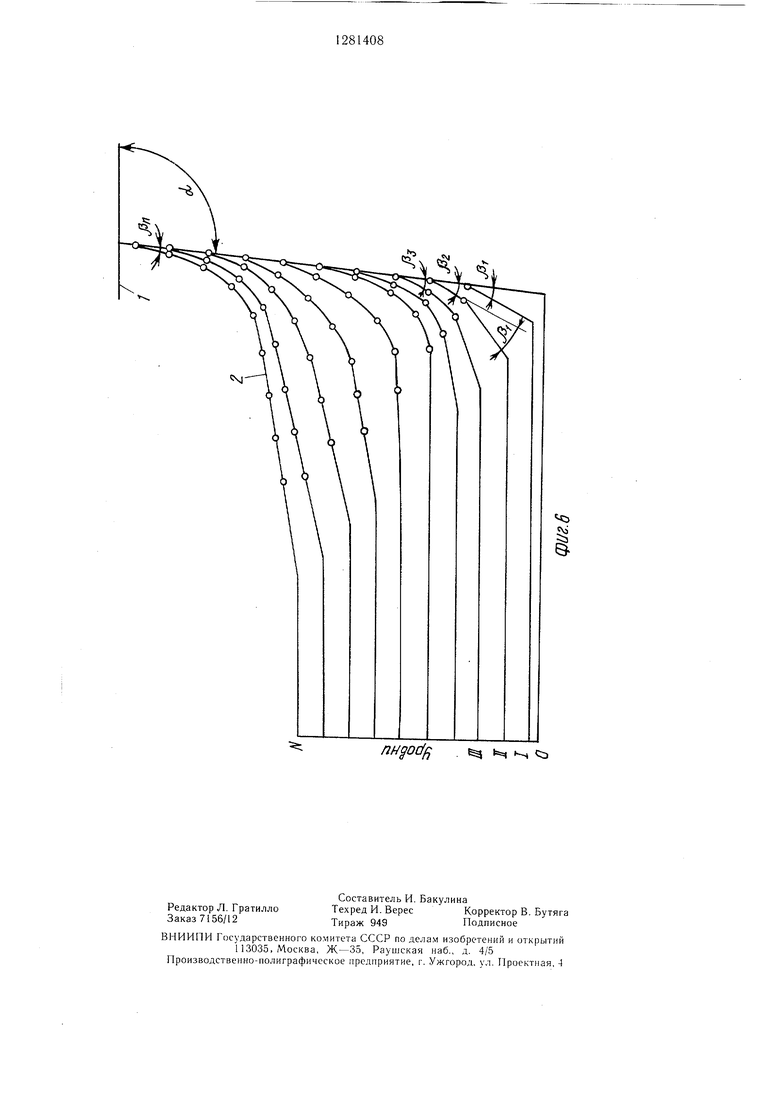
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам. Целью изобретения является уменьшение габаритов и упрошение конструкции за счет выполнения приводного механизма в виде единой резинокордной оболочки. Манипулятор содержит основание, установленную на нем механическую руку 2 с рабочим органом. Механическая рука состоит из полых звеньев 4, шарнирно соединенных посредством шарниров 6. Приводной механизм механической руки 2 выполнен в виде единой резинокордной оболочки 11, размеш.енной в полости звеньев и соединенной с каждым звеном узлами 12 крепления, разделяюшими оболочку 11 на соответст- вуюш,ие изолированные камеры 13. На каждой оси шарнира 6 установлена шарнирно рамка 16 с роликом 17. На каждом полом звене 4 установлен регулируемый упор 7 относительного положения звеньев. Ступенчатое перемешение рабочего органа осуш,е- ствляется выставкой регулируемых упоров 7 относительного положения звеньев. При подаче рабочей среды в изолированные камеры 13 последние сокращаются по длине, обеспечивая поворот полых звеньев 4. При этом ролик 17 изгибает резинокордную оболочку 11. не давая ей выйти за первогначаль- ные габариты механической руки. 2 з.п.ф-лы, 6 ил. i (О Sf/i N5 00 4ib О 00 8
6-6
в-з
0:}игА
фиг. 5
nngodfi
Составитель И. Бакулина
Техред И. ВересКорректор В. Бутяга
Тираж 949Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Пронзводственно-нолиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОКАТНОЙ КЛЕТИ | 2006 |
|
RU2345856C2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
