1Т/
Изобретение относится к области испытаний транспортных средств, а именно к устройствам для определения углов установки управляемых колес транспортного средства, и может быть использовано при диагностировании технического состояния переднего моста автомобилей, тракторов и других колесных транспортных средств в процессе их технического обслуживания и ремонта.
Цель изобретения - улучшение функциональных характеристик устройства.
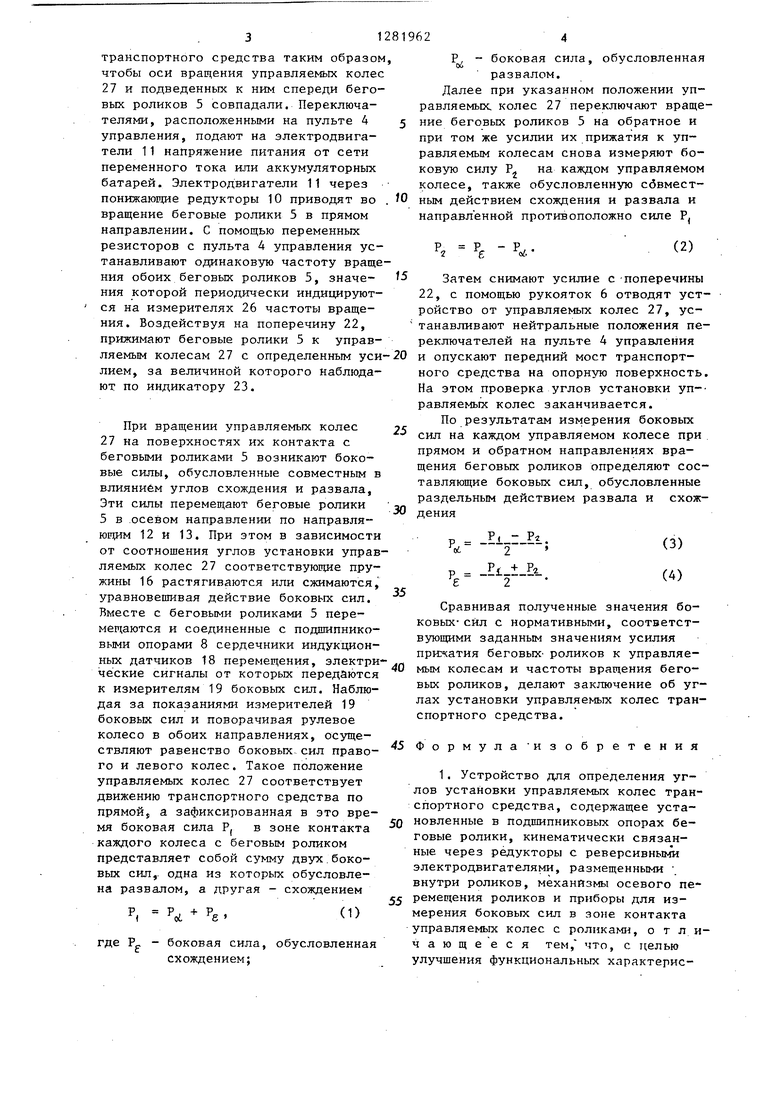
На фиг. 1 изображена схема устройства, вид спереди; на фиг. 2 - то же вид слева.
Устройство для о пределения углов установки управляемых колес транспортного средства содержит раму 1, установленную на подвижных опорах 2 и 3, пульт 4 управления и беговые ролики 5.
Рама 1 имеет две рукоятки 6 для передвижения устройства, расположенные перпендикулярно осям вращения беговых роликов 5, а в ее нижней части расположены ниши 7 для размещения аккумуляторных батарей.
Беговые ролики 5 установлень): в подшипниковых опорах 8, закрепленных на опорных площадках 9, и кинематически соединены через понижающие редукторы 10 с реверсивными электро- двиРателями 11, которые размещены внутри роликов. В качестве электродвигателей 11 применены автомобильные генераторы постоянного тока. Питание электродвигателей 11 предусмотрено как от сети переменного однофазного тока напряжением 220 В, так и аккумуляторных батарей.
Механизмы осевого перемещения беговых роликов 5 выполнены в виде нап- равлякнцих 12 и 13(фиг. 2), установленных на раме 1 с левой и правой ее сторон параллельно осям вращения беговых роликов 5. При этом опорные поверхности направляющих 13 расположены перпендикулярно, опорным по-- верхностям направляющих 12. В направляющих 12 и 13 размещены с воз- можност ью свободного перемещения подшипники 14 качения, укрепленные на тележках 15, жестко связанных с опорными площадками 9. Подшипниковые опоры 8 с помощью пружин 1 и соединены с кронштейнами 17, закрепленными на раме 1 с обеих сторон беговых ро1462 2
ликов 5 по оси, совпадающей с осями вращения этих роликов.
Приборы для измерения боковых сил сил в зоне контакта колес с беговыми
5 роликами 5 состоят из датчиков 18 сил и соединенных с ними измерителей 19 боковых сил, Датчики 18 боковых сил выполнены в виде датчиков перемещения индукционного типа, состоя 0
щих из индукционных катугаек, неподвижно установленных на раме 1, и с сердечников, жестко соединенных с подшипниковыми опорами 8. В состав измерителей 19 боковых сил входят
5 аналого-цифровые преобразователи, ло- логические устройства и цифровые указатели.
Прибор для измерения горизонтального усилия прижатия беговых роликов
0 5 к поверхности управляемых колес состоит из динамометра 20 сжатия, устанойленного между двумя поперечинами 21 и 22 и соединенного с индикатором 23 часового типа. Обе поперечины 21- и 22 расположены между руко ятками 6 параллельно осям вращения беговых роликов 5. Концы поперечины 21 жестко связаны с рукоятками 6, а концы поперечины 22 размещены в па5
0
зах 24 рукояток .6 с возможностью
свободного перемещения в направлении, перпендикулярном осям вращения беговых роликов 5.
Приборы для измерения частоты вра5 щения беговых роликов 5 включают датчики 25 частоты вращения магнитоин- дукционного типа, установленные внутри беговых роликов 5 напротив зубьев шестерен редукторов 10 и соединенные
0 с измерителями 26 частоты вращения, состоящими из логических устройств и цифровых электронных счетчиков импульсов.
На пульте 4 управления размещены
5 цифровые указаоели измерителей 19 боковых сил, измерителей 26 частоты вращения, переменные резисторы для регулирования силы тока, потребляемой электродвигателями 11, амперметр
0 и переключатели. Управляемые колеса
27могут подниматься над опорной поверхностью посредством устройства 28.
Определение углов установки управляемых колес транспортного средства 5 с помощью предлагаемого устройства осуществляют следующим образом.
С помощью подьемного устройства
28(фиг. 2) вывешивают передний мост
транспортного средства таким образом, чтобы оси вращения управляемых колес 27 и подведенных к ним спереди беговых роликов 5 совпадали. Переключателями, расположенными на пульте 4 5 управления, подают на электродвигатели 11 напряжение питания от сети переменного тока или аккумуляторных батарей. Электродвигатели 11 через понижаюгще редукторы 10 приводят во . О вращение беговые ролики 5 в прямом направлении. С помощью переменных резисторов с пульта 4 управления устанавливают одинаковзпо частоту вращения обоих беговых роликов 5, значе- 5 ния которой периодически индицируются на измерителях 26 частоты вращения. Воздействуя на поперечину 22, прижимают беговые ролики 5 к управляемым колесам 27 с определенным уси-20 и опускают передний мост транспортР, - боковая сила, обусловленная
развалом.
Далее при указанном положении управляемых колес 27 переключают враще ние беговых роликов 5 на обратное и при том же усилии их прижатия к управляемым колесам снова измеряют боковую силу PJ на каждом управляемом колесе, также обусловленную сбвмест- ным действием схождения и развала и направленной противоположно силе Р,
Ч
V.
(2)
Затем снимают усилие с -поперечины 22, с помощью рукояток 6 отводят уст ройство от управляемых колес 27, устанавливают нейтральные положения пе реключателей на пульте Д управления
лием, за величиной которого наблюдают по индикатору 23.
При вращении управляемых колес 27 на поверхностях их контакта с беговыми роликами 5 возникают боковые силы, обусловленные совместным в влиянием углов схождения и развала. Эти силы перемещают беговые ролики 5 в осевом направлении по направляющим 12 и 13. При этом в зависимости от соотношения углов установки управ ляемых колес 27 соответствующие пружины 16 растягиваются или сжимаются, уравновешивая действие боковых сил. Вместе с беговыми роликами 5 перемещаются и соединенные с подшипниковыми опорами 8 сердечники индукционных датчиков 18 перемещения, электри чёские сигналы от которых передаются к измерителям 19 боковых сил. Наблюдая за показаниями измерителей 19 боковых сил и поворачивая рулевое колесо в обоих направлениях, осуществляют равенство боковых сил правого и левого колес. Такое положение управляемых колес 27 соответствует движению транспортного средства по прямой$ а зафиксированная в это вре
мя боковая сила Р, в зоне контакта каждого колеса с беговым роликом представляет собой сумму двух.боковых сил,, одна из которых обусловлена развалом, а другая - схождением
Р. Р., + Р,
oi.
е
(1)
где Р - боковая сила, обусловленная схождением;
и опускают передний мост транспортР, - боковая сила, обусловленная
развалом.
Далее при указанном положении управляемых колес 27 переключают вращение беговых роликов 5 на обратное и при том же усилии их прижатия к управляемым колесам снова измеряют боковую силу PJ на каждом управляемом колесе, также обусловленную сбвмест- ным действием схождения и развала и направленной противоположно силе Р,
Ч
скают передний мост транспорт V.
(2)
и опускают передний мост транспортЗатем снимают усилие с -поперечины 22, с помощью рукояток 6 отводят устройство от управляемых колес 27, устанавливают нейтральные положения переключателей на пульте Д управления
ного средства на опорную поверхность. На этом проверка углов установки уп-- равляемых колес заканчивается.
По результатам измерения боковых сил на каждом управляемом колесе при прямом и обратном направлениях вращения беговых роликов определяют составляющие боковых сил, обусловленные раздельным действием развала и схождения
Р.
РЕ
J.L PI 2
2
(3) (4)
Сравнивая полученные значения боковых- сил с нормативными, соответствующими заданным значениям усилия прижатия беговых роликов к управляемым колесам и частоты вращения беговых роликов, делают заключение об углах установки управляемых колес транспортного средства.
Формула изобретения
1. Устройство для определения углов установки управляемых колес транспортного средства, содержащее установленные в подшипниковых опорах беговые ролики, кинематически связанные через редукторы с реверсивными электродвигателями, размещенными внутри роликов, механизмы осевого перемещения роликов и приборы для измерения боковых сил в зоне контакта управляемых колес с роликами, о т л и- чающееся тем, что, с целью улучшения функциональных характерисS 1
тик, оно снабжено рамой с двумя рукоятками для ее передвижения, установленной на подвижных опорах, на которой смонтированы беговые ролики, оси вращения которых расположены перпен- дикулярно рукояткам, приборами для измерения частоты вращения роликов и горизонтального усилия прижатия их к вывешенным управляемым колесам, при этом каждый из механизмов осево- го перемещения роликов включает в себя направляющие, установленные на раме параллельно осям вращения роликов, тележку с закрепленными на ней под- шипниковьгми опорами роликов, установ- ленную для взаимодействия с направляющими, кронштейны, закрепленные на раме с обеих сторон роликов, и пружины, установленные между кронштейнами
и подшипниковыми опорами,
2. Устройство по п. 1, о. т л и - чающееся тем, что приборы
j 0 5
0
962ft
для измерения частоты вращения роликов вьтолнены в виде датчиков магни- тоиндукционного типа, установленных роликов напротив зубьев шестерен редукторов и соединенных с измерителями частоты вращения.
3. Устройство по п. 1, о т л и - чающееся тем, что прибор для измерения горизонтального усилия прижатия роликов к управляемым Колесам вьшолнен в виде динамометра сжатия, - установленного между поперечинами, закрепленн ыми между рамой и рукоятками, при этом поперечины расположены параллельно осям вращения роликов, концы одной из поперечин жестко связаны с рукоятками, а концы второй по- перечинь размещены в пазах рукояток с возможностью свободного перемещения в направлении, перпендикулярном осям вращения роликов.
vsA/NHx
17
//// //// //// //// //// //// ////
(риг.1
Редактор Н. Рогулич
Составитель В. Калмыков
Техред И.Попович Корректор М. Шароши
Заказ 7256/39 Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москву, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная 4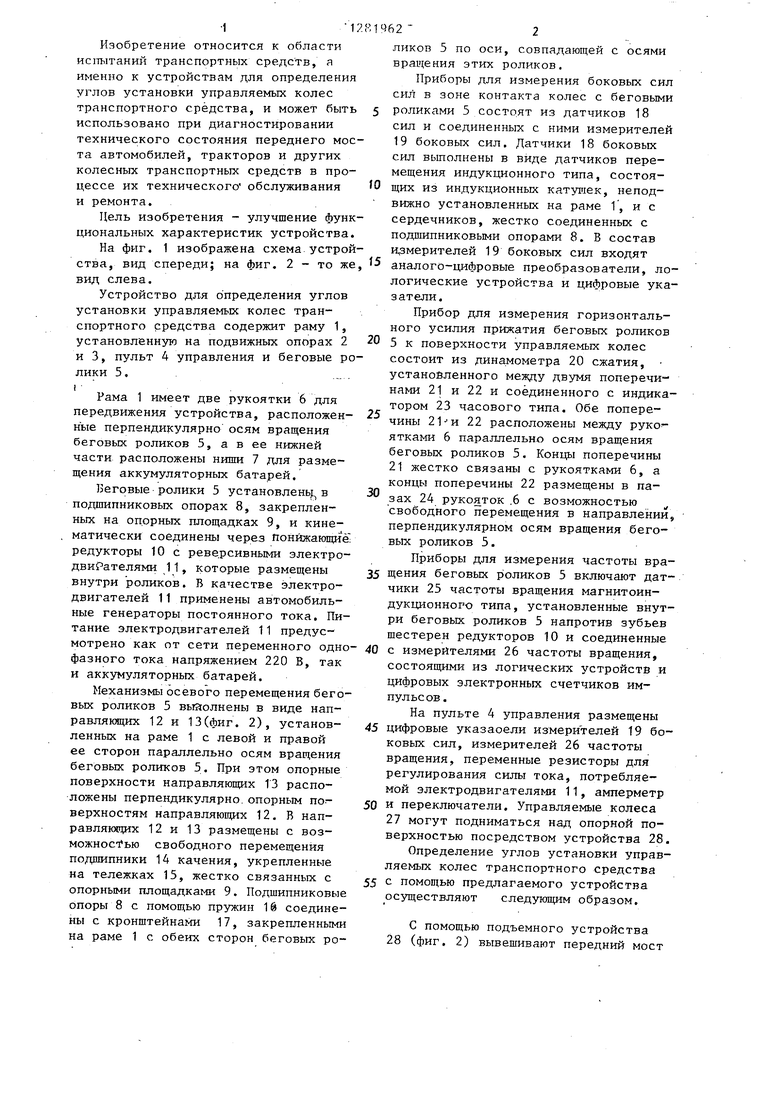
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для изменения углов сходимости управляемых колес транспортного средства | 1981 |
|
SU1023207A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089845C1 |
| Способ оценки совместного влияния наВЕличиНу бОКОВОй Силы углОВ СХОждЕНияи РАзВАлА упРАВляЕМыХ КОлЕС ТРАНСпОРТНыХСРЕдСТВ | 1978 |
|
SU847137A1 |
| ПЕРЕДВИЖНОЙ ПРИЦЕП-СТЕНД ДЛЯ ДИАГНОСТИКИ, РЕГУЛИРОВКИ, РЕМОНТА, УСТАНОВКИ УГЛОВ СХОЖДЕНИЯ И РАЗВАЛА КОЛЕС АВТОМОБИЛЕЙ | 2010 |
|
RU2442127C1 |
| Стенд для измерения схождения и развала колес транспортного средства | 1990 |
|
SU1746245A1 |
| Устройство для проверки углов установки колес транспортного средства | 1990 |
|
SU1783347A1 |
| Стенд для измерения схождения и развала колес транспортного средства | 1983 |
|
SU1147947A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 2005 |
|
RU2292011C1 |
| Способ диагностирования развала управляемых колес транспортного средства по косвенным параметрам | 1978 |
|
SU750317A1 |
| Устройство для проверки установки управляемых колес и рулевого управления транспортного средства | 1982 |
|
SU1030693A1 |

Изобретение относится к устройству для определения углов установки управляемых колес транспортного средства и может быть использовано при диагностировании технического состояния переднего моста автомобилей, тракторов и других колесньпс тран-г спортных средств в процессе их. технического обслуживания и ремонта. Цель - сокращение стоимости устройства и расширение области его примене-. ния. Устройство содержит раму, установленную на подвижных опорах 2 и 3, пульт 4 управления, беговые ролики 5, приборы для измерения боковых сил в зоне контакта колес с роликами, механизм измерения горизонтального усилия прижатия роликов и приборы для измерения частоты их вращения. Взвешивая передний мост, подводят к управляемым колесам 27 ролики 5, определяют усилие и замеряют величину боковой силы на каждом управляемом колесе 27. Сравнивая значение сил с нормативными, делают заключение об углах.установки управляемых кодес. 2 з.п. ф-Лы, 2 ил. (Л 27 //// //// //// //// //// Фи2.г 21 20 ю 00
| Способ диагностирования развала управляемых колес транспортного средства по косвенным параметрам | 1978 |
|
SU750317A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
