кручивания) относительно вала 8 датчика, а другое - относительно закрепленной на этом валу втулки 17 с выступами на фланце- 16, в угловом зазоре между которыми расположен по1
Изобретение относится к машиностроению.
Целью изобретения является повышение точности.
На фиг. 1 изображено устройство, общий видj на фиг. 2 - разрез А-А на фиг. 1. Механизм управления содержит корпус 1, установленные в нем рукоятку 2 с шаровой опорой 3 и две взаимно перпендикулярных дуги 4 и 5 на осях 6 и 7, связанных с валами 8 датчиков 9 с помощью зубчатых передач 10 причем дуги 4 и 5 сопряжены с хвостовиком 11 рукоятки 2 своими пазами 12
Одно из зубчатых колес 13 каждой зубчатой передачи 10 установлено свободно на валу 8 датчика 9 и снабжено поводком 14 для сопряжения с выступами 15, выполненными на фланце 16 втулки 17, жестко закрепленной на валу 8 датчика 9, причем на втулке 17 свободно установлено и подпружинено к ее фланцу 16 первое дополнительное зубчатое колесо 18, сопряженное с вторым дополнительным колесом 19, жестко связанным с осью 7 дуги 4 (5). Первое дополнительное зубчатое колесо 18 подпружинено к другому фланцу втулки 17 с помощью тарельчатой пружины 20, установленной на втулке 17 и поджатой к нему с помош ью регулировочной гайки 21.
Шаровая опора 3 рукоятки 2 снабжена регулировочным элементом 22 с коническим центральным отверстием 23 для ограничения перемещения рукоятки 2.
Зубчатые передачи 10 содержат также жестко установленные на осях 7 зубчатые колеса 24 в виде зубчатых секторов. Дополнительные зубчатые колеса 18 и 19 также выполнены в виде зубчатых секторов.
водок первого колеса, при этом нторое- колесо подпружинено к фланцу втулки установленной на ней тарельчатой пружиной 20. 2 з.п. ф-лы, 2 ил.
Зубчатое колесо 18 образует с фланцем 16 втулки 17 фрикционную передачу 25.
Передаточное отношение зубчатых
колес 24 и 13 выбирается большим передающего отношения зубчатых колес 19 и 18.
Механизм работает следующим образом.
При работе с механизмом наведения, например, в составе индикаторного комплекса СОИ оператор плавно наклоняет рукоятку в направлении перемещения видеосигнала на экране индикатора, добиваясь наведения (попадания) визира, смещаемого по полю экрана механизмом, на отметку видеосигнала. При отклонении рукоятки 2 движение передается через дуги 4 и 5 и оси 6
и 7 качания на зубчатые колеса 19 и 24, которые передают его на зубчатые колеса 13 и 18. Если поводок 14 не взаимодействует с выступами 15, то движение передается на валы 8 датчиков 9 через зубчатые колеса 19 и 18 и фрикционную передачу 25. Колесо 13 при этом свободно вращается на валу 8. Когда поводок 14 догоняет один из выступов 15, движение передается на
вал 8 датчика 9 через выступы 15 фланца 16 втулки 17 через зубчатые колеса 13, а фрикционная передача 25 при этом проскальзывает.
Таким образом обеспечиваются последовательно малая и большая скорости управления, что повьшшет точность.
Формула изобретения
1, Механизм управлен ия, содержащий корпус, установленные в нем рукоятку с шаровой опорой и две дуги на взаимно перпендикулярных осях связанных с валами датчиков с помощью зубчатых
передач, причем дуги сопряжены с хвоетоником рукоятки своими пазами, о т- л и ч а ю UI, и и с я тем, что, с целью повышения точности, одно из зубчатых колес каждой зубчатой передачи установлено свободно на валу датчика и снабжено поводком для сопряжения с выступами, выполненными на фланце втулки, жестко закрепленной на валу датчика, причем на втулке свободно установлено и подпружине но к ее фланцу первое дополнительное зубчатое колесо, сопряженное с вторым дополнительным колесом, жестко связанным с осью дуги.
т- с
-5Ю21034
2. Механизм по п. 1, о т л и- чающийся тем, что первое
дополнительное зубчатое колесо подпружинено к фланцу втулки с помощью тарельчатой пружины, установленной на втулке и поджатой к нему с помощью регулировочной гайки.
3. Механизм по п. 1, отличающийся тем, что шаровая опора рукояток снабжена регулировочным элементом с коническим центральным отверстием для ограничения перемещения рукоятки.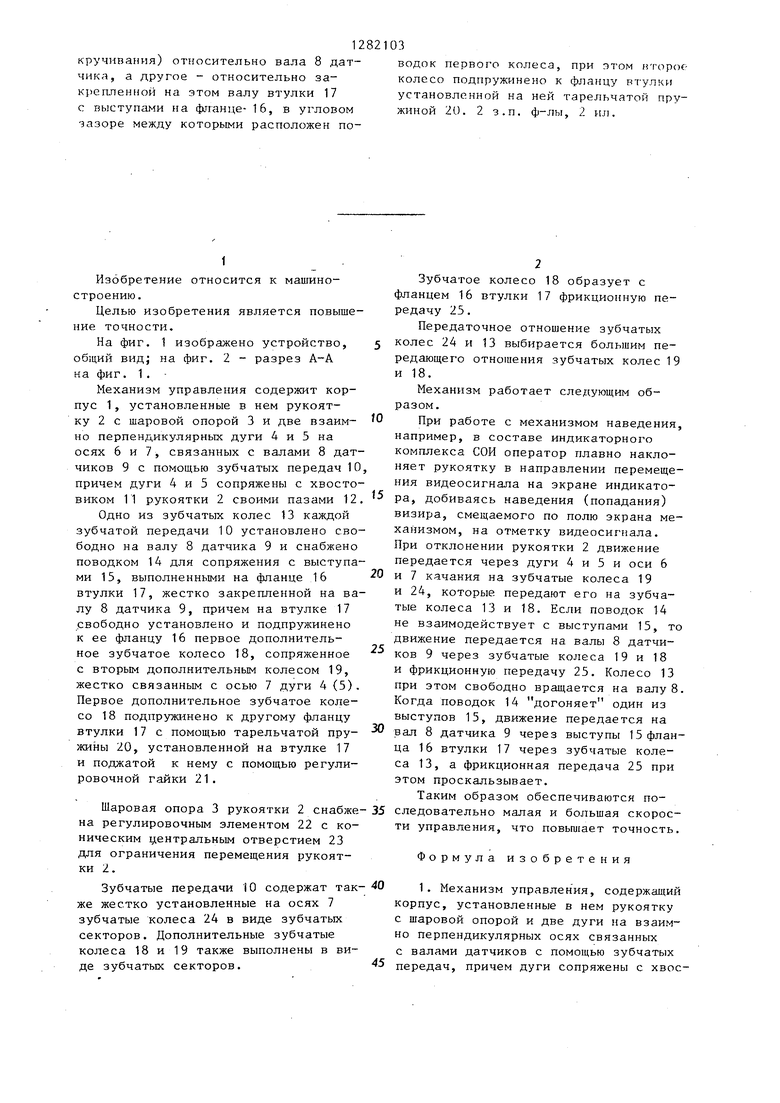
| название | год | авторы | номер документа |
|---|---|---|---|
| Безынерционная катушка с самоподсекателем | 2016 |
|
RU2624203C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Устройство управления | 1985 |
|
SU1312553A1 |
| ПРИВОД ПОВОРОТА | 2006 |
|
RU2323153C1 |
| Устройство для натяжения,соединения и отрезки обвязочных лент из синтетического материала | 1982 |
|
SU1134117A3 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1977 |
|
SU657917A1 |
| Устройство для автоматической заправки перфоратора с устройством прерывистого протягивания перфорируемого материала | 1990 |
|
SU1728842A1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 1999 |
|
RU2151225C1 |
| Задняя бабка с электроприводом | 1988 |
|
SU1646690A1 |
Изобретение относится к устройствам управления с ручным приводом. Цель изобретения - повышение точности. Механизм содержит корпус с шаровой опорой 3 под рукоятку 2 и установленные в нем на осях качания взаимно перпендикулярные дуги 4 и 5 и датчики вращения 9, валы 8 которых связаны с осями качания соответствующих дуг посредством зубчатых передач. Одно из колес зубчатой передачи снабжено поводком 14 и установлено с возможностью свободного вршцения (про(Л со Фи.1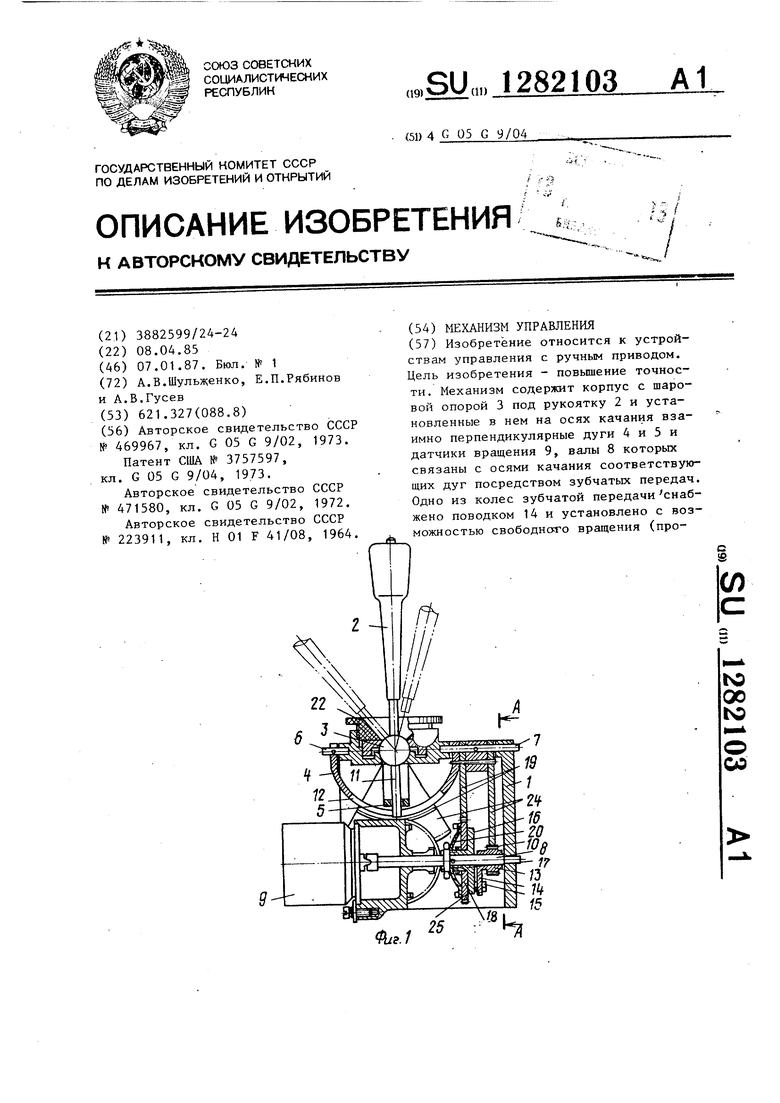
| Устройство для слежения и выдачи координат | 1973 |
|
SU469967A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 3757597, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Механизм управления насосом | 1972 |
|
SU471580A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СТАНОК МНОКОСЕКЦИОННОЙ НАМОТКИ МАЛОГАБАРИТНЫХ ТОРОИДАЛЬНЫХ СЕРДЕЧНИКОВ | 1964 |
|
SU223911A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
