128308
вой гайки 15, навернутой на винт 16, и привод поворота штока 9, с помощью которого производится его позиционный поворот до тех пор, пока жесткий упор 10 не расположится над соответствующим регулируемым упором. Затем происходит опускание штока 9. Конеч ные положения штока 9 определяются по сигналу одного из датчиков край
1
Изобретение относится к машиностроению, в частности к приводам мини- манипуляторов и минироботов.
Целью изобретения является расширение технологических возможностей манипулятора.
На чертеже изображено устройство, общий вид.
Устройство содержит корпус 1, на котором установлен силовой цилиндр, состояш 1й из корпуса 2 и выполненных из немагнитопроводного материала крышки 3 и 4, в котором закреплен постоянный магнит 5, воздей- ствуюцртй своим полем на геркон 6. Корпус 1 имеет соосно расположенные направляющие отверстия 7 и 8 для штока 9, взаимодействующего своим верхним концом с поршнем 4. Магнит 5 и геркон б образуют датчик одного . . крайнего (первого) положения штока 9 На штоке 9 расположен жесткий упор 10, вьшолненный в виде радиального пальца, которым шток с помощью пружины 11 прижимается к ограничительному бурту 12 корпуса 1, Шток 9 вместе с упором 10 может вращаться в отверстиях 7 и 8 приводом поворота, состоящим из зубчатых колес 13 и 14, связанных с шаговым, например пневматическим, двигателем (не показан), при этом зубчатое колесо 13 допускает продольное перемещение в нем штока 9. Вокруг оси вращения штока 9 с шагом, равным шагу между поворотными позициями, расположены регулируемые упоры хода штока, каждый из которых выполнен в виде ходовой гайки 15, навернутой на расположенный параллельно штоку 9 винт 16 установленный в 1 аправляющих отверстиях 17 и
него положения, состоящего из магнита 5 и геркона 6, и датчиков других крайних положений штока 9, каждый из которых вьтолнен в виде блока 5, содержащего источник светового потока и фотодиод, неподвижно установленного на корпусе 1, и стакана 20, жестко связанного с винтом 16. 2 з,п. ф. 1 ил.
5
0
18 корпуса 1 и ограниченно подвижный в осевом направлении. Гайка 15 для взаимодействия с жестким упором 10 имеет ограничительную площадку 19.
На концах винта 16 установлены стакан 20 и фланец 21, взаимодействующие соответственно с упорами 22 и 23, установленными на корпусе 1. В исходном положении винт 16 прижат дном стакана 20 к упору 22 пружиной 24. Стаканы 20 регулируемых упоров являются подвижной частью дополнительных датчиков других линейных положений штока 9, неподвижная часть каждого из которых вьшолнена в виде расположенного на корпусе 1 блока 25, состоящего из установленных друг напротив друга фотодиода и источника света.
Для обеспечения регулировки величины хода штока 9 свободный конец 26 винта 1.6 выступает за пределы корпуса 1 с той же стороны, что и шток,
. а ходовая гайка 15 предохранена от проворотов ее гранью 27, взаимодействующей с направляющей плоскостью 28 корпуса 1. Рабочая камера 29 силового цилиндра подключена к двухпо0 ,зиционному пневмораспределителю 30, соединяющему ее либо с выходом 31 в атмосферу через регулируемый дроссель -32 (первая пневмокоммутацион- ная позиция), либо с источником 33
5 сжатого воздуха через аналогичный дроссель 34 (вторая пневмокоммутахщ- онная позиция). Выходы блоков 25 и геркона подключены к соответствующим электронным элементам 35 с логичес0 кой функцией ИЛИ.
Устройство работает следующим образом.
31283084начала производится позициойный
ли не ня ту эт вд по ет шт ка тьш шт
поворот штока 9 приводом поворота (шаговым двигателем с помощью колес 13 и 14. зубчатой передачи) . При этом упор 10 штока располагается над площадкой 19 ходовой гайки 15, соответствующей выбранной поворотной позиции.
При переводе пневмораспределите- ля 30 на вторую пневмокоммутационную позицию в полость рабочей камеры 29 подается сжатый воздух от источника 33 и под его давлением поршень 4 с магнитом 5 и штоком 9 опускается, сжимая пружину 11. Упор 10 в конце опускания штока 9 нажимает на площадку 19 гайки 15, перемещая последнюю вместе с винтом 16, пока фланец 21 не встретится с упором 23. При этом
в начале опускания штока 9 срабатьгоа-20 ленный на корпусе, в котором расположен регулируемый упор, жесткий упор, связанный со штоком силового цилиндра и установленный с возможностью взаимодействия с регулируемым упором,и датчик первого линейно25
ет геркон 6 из-за удаления от него магнита 5, а в конце опускания срабатывает фотодиод в блоке 25 из-за перекрытия светового потока боковой поверхностью стакана 20, сигнализируя в систему управления устройства об окончании опускания штока 9 на данной поворотной позиции и разрешая тем самым работу других устройств манипулятора. Скорость опускания 30 штока можно регулировать изменением проходного сечения дросселя 34. Кроме того, при опускании штока проявляется эффект его притормаживания в конце хода за счет действия пру- 35 жин 24 и сжатия пружины 11.
При восстановлении первой пнев- мокоммутахщонной позиции пневморас- пределителя 30 полость рабочей ка- 40 меры 29 пневмоцилиндра сообщается с атмосферой и под действием возвратных пружин 11 и 24 все опущенные детали поднимаются в исрсодные положения. При этом в начале подъема 45 штока 9 срабатывает фотодиод в блоке 25 из-за открытия светового потока боковой стенкой стакана 20, а в конце подъема замыкается геркон датчика 6 полем магнита 5, сигнали- 50 зируя в систему управления устройства об окончании подъема штока 9. Скорость подъема штока 9 можно регу-, лировать изменением проходного сечения дросселя 32. Кроме того, при 5 подъеме штока проявляется эффект уменьшения скорости подъема за счет уменьшения деформации возвратной пружины 11.
го положения штока, отличающееся тем, что, с целью ния технологических возможностей, оно снабжено приводом поворота штока, дополнительными регулируемыми упорами, общее число которых равно числу точек углового позиционирования штока, а каждый из них вьпюлнен в виде ходовой гайки, расположенной на винте, установленном в корпусе параллельно оси штока и подпружиненном к этому корпусу, и дополнительными датчиками других линейных положений штока, каждый из которых состоит из двзгх частей: неподвижной, установленной на корпусе, и подвижной, связанной с винтом регулируемого упора, при этом жесткий упор закреплен на штоке с возможностью взаимодействия с ходовыми гайками регулируемых упоров, а датчик первого крайнего положения штока выполнен в виде герксна, установленного на цилиндре, и постоянного магнита, размещенного в поршне.2. Устройство по п. 1, отличающееся тем, что привод поворота штока включает зубчатое коЛе- со, установленное на штоке с возможностью осевого перемещения, и шаговый двигате 1Ь, вал которого кинематически связан с указанным зубчатым колесом.
На каждой поворотной позиции величину перемещения штока 9 можно независимо от других позиций изменять вращением винта 16 за его выс- тупаюш 1й из корпуса 1 конец 26. При этом.ходовая гайка 15 перемещается вдоль винта 16 и расстояние между ее поверхностью 19 и упором 10 изменяется в необходимых пределах. Ход штока 9 может быть очень мальм, так как ограничен только условием сраба тьшания датчиков крайних положений штока 9.
Формула изобретени
1. Устройство для перемещения исполнительного органа манипулятора, содержащее силовой цилиндр, установ20
25
30 35
го положения штока, отличающееся тем, что, с целью ния технологических возможностей, оно снабжено приводом поворота штока дополнительными регулируемыми упорами, общее число которых равно числу точек углового позиционирования штока, а каждый из них вьпюлнен в виде ходовой гайки, расположенной на винте, установленном в корпусе параллельно оси штока и подпружиненном к этому корпусу, и дополнительными датчиками других линейных положений штока, каждый из которых состоит из двзгх частей: неподвижной, установленной на корпусе, и подвижной, связанной с винтом регулируемого упора, при этом жесткий упор закреплен на штоке с возможностью взаимодействия с ходовыми гайками регулируемых упоров, а датчик первого крайнего положения штока выполнен в виде герксна, установленного на цилиндре, и постоянного магнита, размещенного в поршне.2. Устройство по п. 1, отличающееся тем, что привод поворота штока включает зубчатое коЛе- со, установленное на штоке с возможностью осевого перемещения, и шаговый двигате 1Ь, вал которого кинематически связан с указанным зубчатым колесом.
5 1283084
3, Устройство по п. 1, отличающееся тем, что неподвиж- кана, установленного на винте регу- ная часть дополнительных датчиков лируемого упора с возможностью захо- вьтолнена в виде расположенных друг да боковой стенки стакдна между фотонапротив друга фотодиода и источни-5 диодом и источником света.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
Изобретение относится к машиностроению, в частности к приводам миниманипуляторов и минироботов. Цель изобретения - расшнрение технологических возможностей за счет обеспечения возможности позиционных поворотов исполнительного органа манипулятора. Привод содержит силовой цилиндр, установленный на корпусе 1, в направлякнцих отверстиях 7 и 8 которого параллельно оси цилиндра расположен шток 9 цилиндра с жестким упором 10, регулируемые упоры, каждый из которых вьшолнен в виде ходо(Л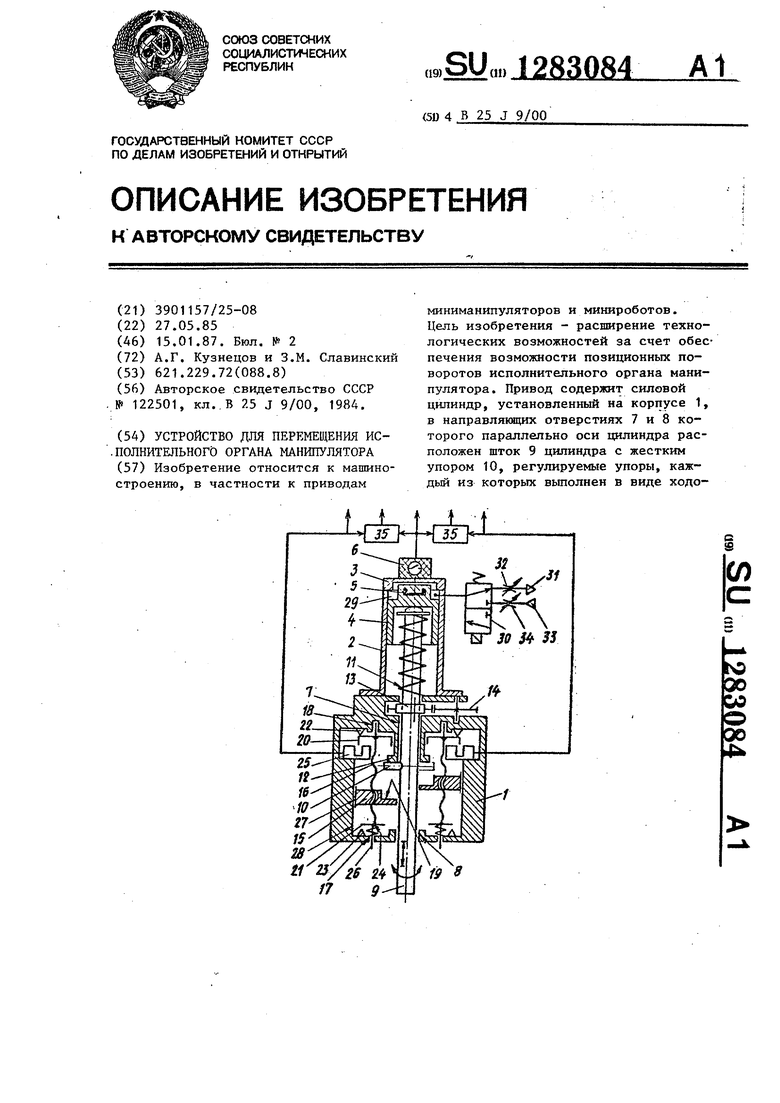
| Способ питания сложных антенн | 1958 |
|
SU122501A1 |
