(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1976 |
|
SU607731A2 |
| Промышленный робот | 1983 |
|
SU1079427A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |

1
1 Изобретение относится к машиностроению Нзвесген промышленный робог, содержащий механическую руку с силовым цилиндро осевого перемещения и приводом поворота, выполненным в виде зубчато-реечной пере- дачи, рейка которой размещена на штоке силового цилиндра.
Цель изобретения - увеличить число гочек позишюнирования.
Это достигается тем, что в корпусе цилиндра осевого перемещения жестко закреплена втулка с продольными пазами. Шток этого цилиндра выполнен полым и снабжен со стороны порщия, по меньшей мере, двумя диаметрально расположенными зубцами, вхо- дяшими в пазы втулки, внутри которой установлен шарнирно связанный с корпусом цилиндра ходовой винт, несущий раздвижные упоры, взаимодействующие с ука;:)анными зубцами. Привод поворота снабжен регулируемыми упорами, входящими в отверстия на рейке, перекрываемые управляемыми заслонками.
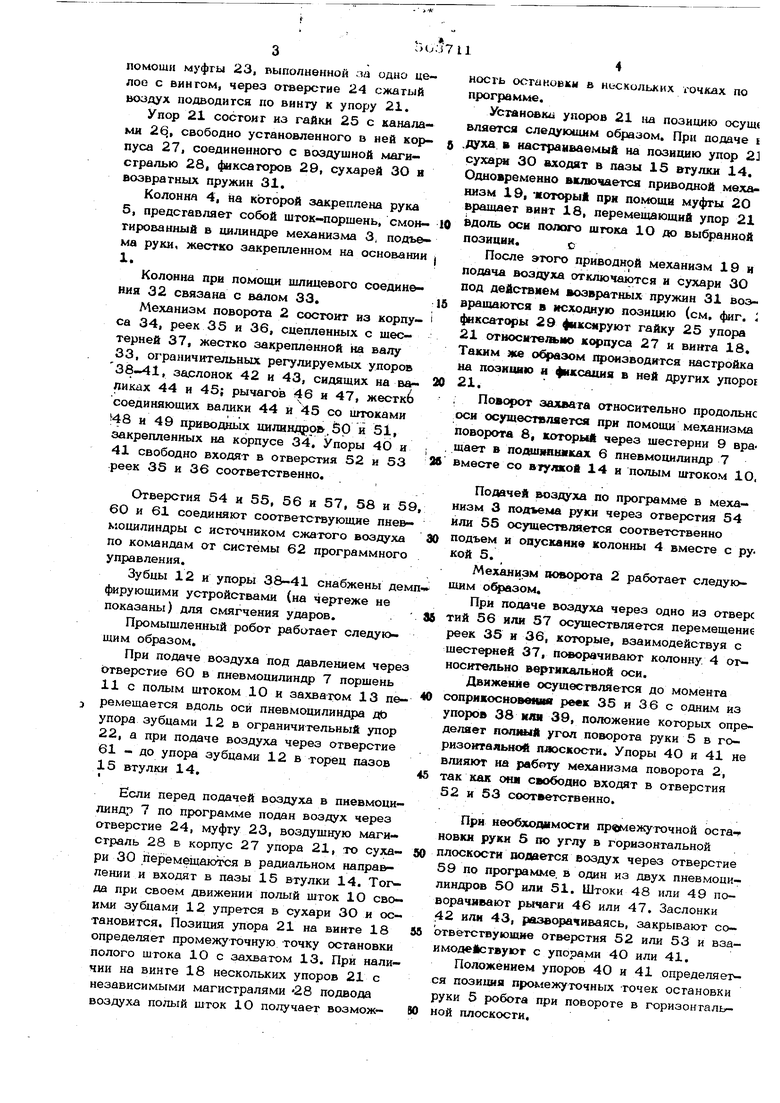
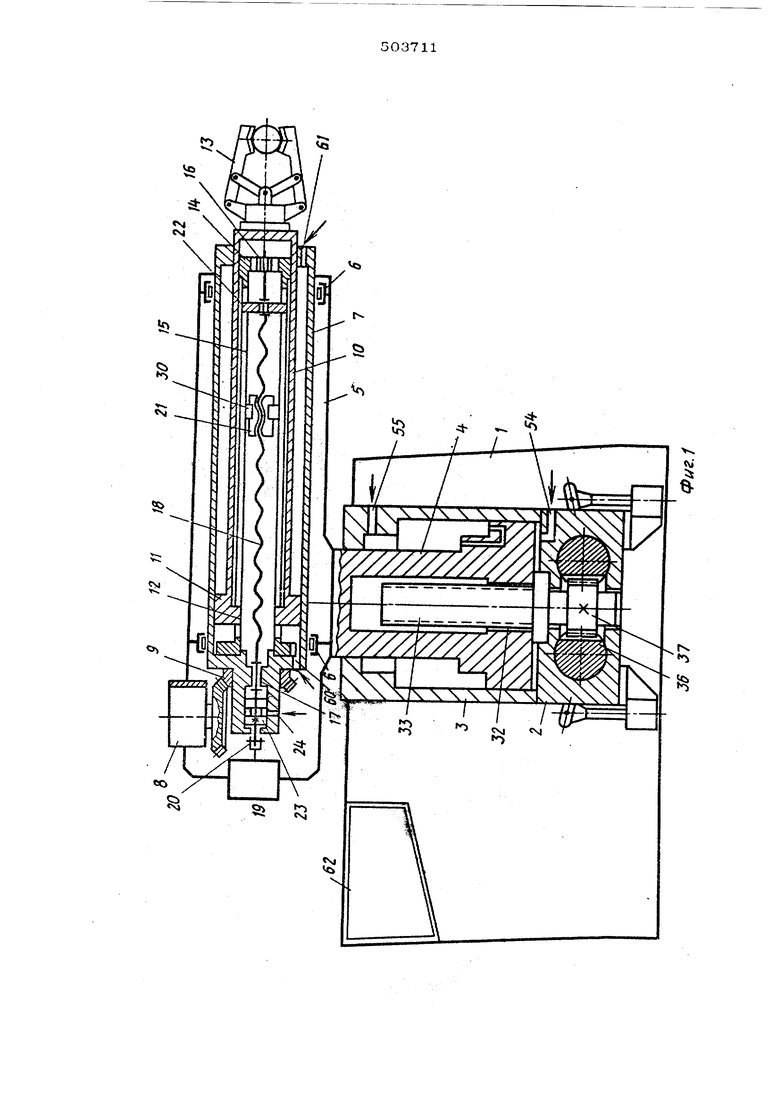
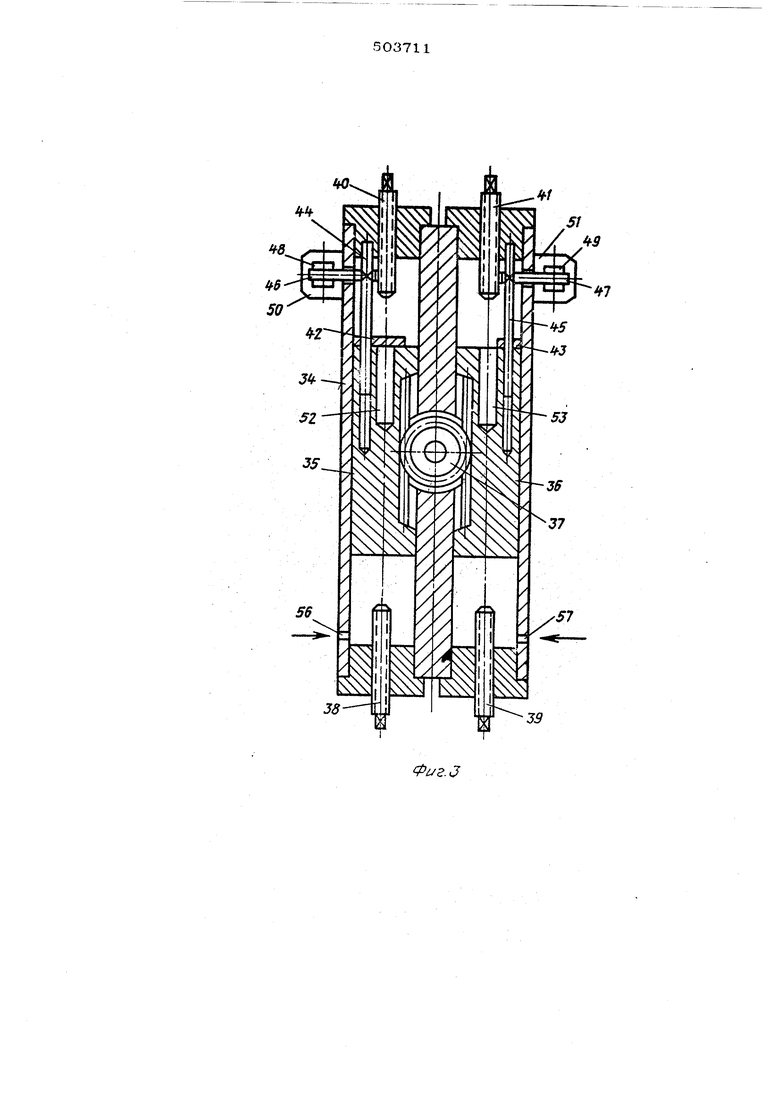
Ма фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - регулируемый
lynop; на фиг. 3 - механизм поворота руки (колонны); на фиг, 4 - привод заслонки механизма поворота.
Промышленный робот состоит из основа;Ния 1, механизма 2 поворота руки, механизма 3 подъема руки, колонны 4, руки 5.
В корпусе руки 5 на подшипниках 6 подвижно установлен пневмоцилиндр 7, приводимый во вращение механизмом 8 через шее- ;терни 9. Внутри пнев моим линдра смоцтирован полый шток 10 с поршнем 11 и зубцами 12, диаметрально расположенными во внутрь. На наружном конце штока закреплен пневматический захват 13. Соосно и внутри полого шгока жестко установлена втулка 14 с продольными пазами 15, с которыми взаимодействуют зубцы 12, не позволяя штоку 1О поворачиваться относительно пневмоцилиндра 7.
Внутри пневмоцилиндра 7 установлен на подшипниках 16 и 17 винт 18, котор.1й приводится во вращение приводным механизмом 19 через муфту 2О и несет на себе, как минимум, один упор 21. На конце винта .расположен ограничительный упор 22. При помошн муфгы 23, выполненной ла одно целое с вингом, через огверсгие 24 сжатый воздух подводится по винту к упору 21. Упор 21 состоит из гайки 25 с каналами 26, свободно установленного в ней корпуса 27, соединенного с воздушной магистралью 28, фиксаторов 29, сухарей ЗО н возвратных пружин 31. Колонна 4, на которой закреплена рука 5, представляет собой шток-поршень, смонтированный в цилиндре механизма 3, подъе ма руки, жестко закрепленном на основании х« Колонна при помощи шлииевого соединения 32 связана с валом 33. Механизм поворота 2 состоит из корпу- са 34, реек 35 и 36, сцепленных с шестерней 37, жестко закрепленной на валу 33, ограничительных регулируемых упоров 38-41, зарлонок 42 и 43, сидяших на валиках 44 и 45} рычагов 46 и 47, жестко соединяющих валики 44 и 45 со оттоками 48 и 49 приводаых цилищфр&. 50 и 51, закрепленных на корпусе 34. Упоры 40 и 41 свободно входят в отверстия 52 и 53 реек 35 и 36 соответственно. Отверстия 54 и 55, 56 и 57, 58 и 59 60и 61 соединяют соответствуюшие пнев- моцилиндры с источником сжатого воздуха по командам ат системы 62 программного управления. Зубиы 12 и упоры 38-41 снабжены дем фирующими устройствами (на чертеже не показаны) для смягчения ударов. Промышленный робот работает следующим образом. При подаче воздуха под давлением через отверстие 60 в пневмоцилиндр 7 поршень 11 с полым штоком 10 и захватом 13 пе3 ремещаегся вдоль оси пневмоцилиндра дЬ упора зубцами 12 в ограничительный упор 22, а при подаче воздуха через отверстие 61- до упора зубцами 12 в торец пазов 15 втулки 14. Если перед подачей воздуха в пневмоцилиндр 7 по программе подан воздух через отверстие 24, муфту 23, воздушную магистраль 28 в корпус 27 упора 21, то сухари 30 перемещаются в радиальном направлении и входят в пазы 15 втулки 14. Тогда при своем движении полый шток 10 сво ими зубцами 12 упрется в сухари ЗО и ос тановится. Позиция упора 21 на винте 18 определяет промежуточную точку остановки полого штока Юс захватом 13. При нали чии на винте 18 нескольких упоров 21 с независимыми магистралями -28 подвода воздуха полый шток Ю получает возможносгь остановки в иискольких точках по программе. Установка упоров 21 на позицию осушс вляется следующим образом. При подаче i духа в настраиваемый на позишю упор 2J сухари 30 входят в пазы 15 втулки 14. Одновременно ллточ&ется приводной механизм 19, -который при помоши муфты 20 врашает винт 18, перемещающий упор 21 едоль оси полого шгока 1О до выбранной позиции.с После этого приводной механизм 19 и подача воздуха отключаются и сухари 30 под действием возвратных пружин 31 возвращаются в исходную позицию (см. фиг. фиксаторы 29 фиксируют гайку 25 упора 21 отаосытепыю корпуса 27 и винта 18. Таким же образом гфоизводится настройка на ПОЗИЦИЮ и фиксация в ней других ynopot 21. , Поворот захвата относительно продольнс оси осушествляется при помощи механизма поворота 8, который через шестерни 9 вращает в подшяпшисах 6 пневмоцилиндр 7 вместе со втулкой 14 и полым штоком 1О, Подачей воздуха по программе в механизм 3 подъема руки через отверстия 54 или 55 осуществляется соответственно подъем и опускание колонны 4 вместе с ру. кой 5. Механизм поворота 2 работает следукьшим обрезом. При подаче воздуха через одно из отверс тий 56 или 57 осуществляется перемещение реек 35 и 36, которые, взаимодействуя с шестерней 37, поворачивают колонну 4 относительно вертикальной оси. Движение осуществляется до момента соприкосиовенш реек 35 и 36 с одним из упоров 38 идш 39, положение которых определяет полный угол поворота руки 5 в гоpH3oifTaflbHO i пяоскости. Упоры 40 и 41 не влияют на работу механизма поворота 2, так как они свободно входят в отверстия 52 и 53 соответственно. При необходимости промежуточной оста-т новкн руки 5 по углу в горизонтальной плоскости водается воздух через отверстие 59 по программе, в один из двух пневмоцилин;фов 5О или 51. Штоки 48 или 49 поворачивают рычаги 46 или 47. Заслонки 42 или 43, разворачиваясь, закрываю т соответствующие отверстия 52 или 53 и взаимодействуют с упорами 4О или 41. Положением упоров 40 и 41 рпределяех ся позиция проь1ежуточных точек остановки руки 5 робота при повороте в горизонтальной плоскости.
Формула изобретения
Промышленный робот, содержащий механяческую руку с силовым цилиндром осевого . перемещения н приводом поворота, выло ненным в виде зубчато-реечной передачи,, рейка которой размещена на штоке силового цилиндра, отличающийся тем, что, с целые увеличения числа точек позиционирова1шя, в корпусе цилиндра осевого перемещения жестко закреплена втулка
:С продольными пазами, шток этого цилинд,ра выполнен полым и снабжен со стороны поршня, по меньшей мере, двумя диаметрально расположенными зубцами, входящими в пазы втулки, внутри которой устано&лен шарнирно связанный с корпусом цилин ра ходовой винт, несущий раздвижные упоры взаимодействуюише с указанными зубцами, а привод поворота снабжен регулируемыми Рупорами, входящими в отверстия на рейке, :Перекрьшаемые уп;равляемымч. заслошсами.
«4J
A
%
Ч-8.
-схт- 7
39
Фиг.
J4
ФигЛ
