О1
о сд
00
со
Изобретение относится к машинам строй- индустрии, например, для изготовления тел вращения из бетонных смесей центрифугированием, уплотнения бетонных смесей на стационарных вибронлощадках.
Целью изобретения является повышение КПД привода.
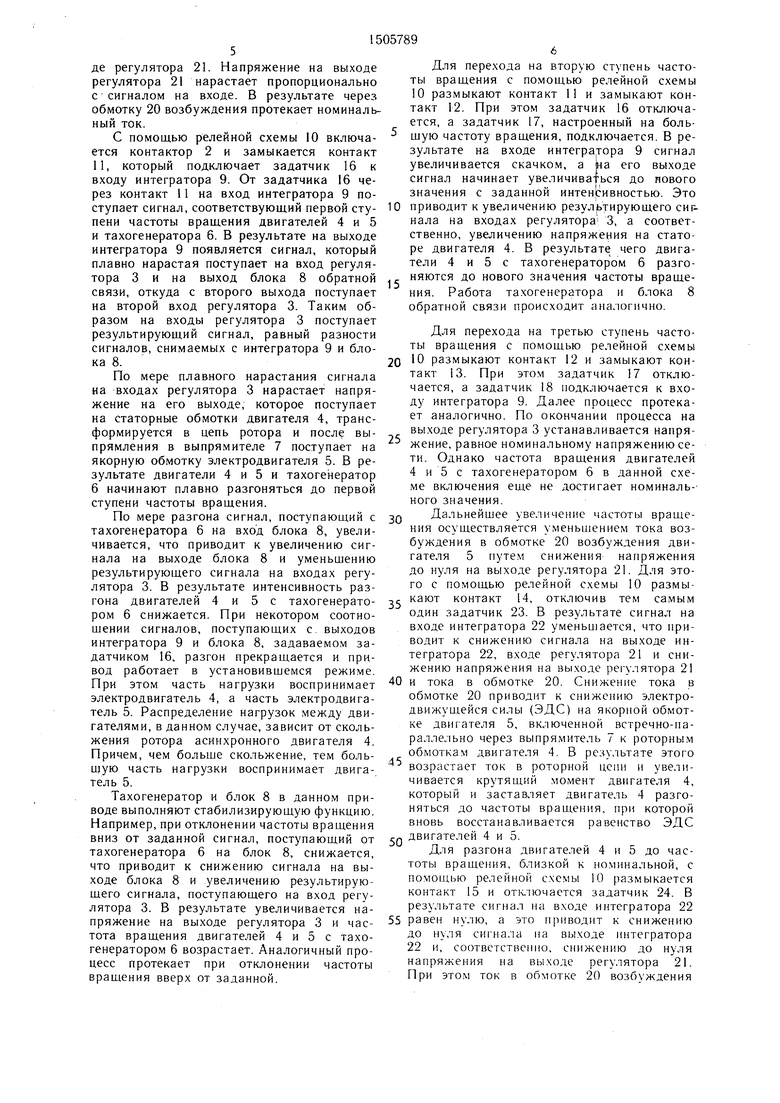
На фиг. 1 приведена функциональная блок-схема привода центрифуги; на фиг. 2 - схема блока обратной связи; на фиг. 3 - схема интеграторов.
10 стабилитрону 28 включен резистор 29, один вывод которого соединен с катодом стабилитрона 28 и подключен к выходу блока, а второй вывод соединен с анодом стабилитрона 28 и одним выводом резисФункциопальная блок-схема привода центрифуги содержит автоматический выключатель 1, вход которого подключен к сети
трехфазного переменного тока, а выход сое-тора 30 переменного сопротивления, второй
динен с входом контактора 2, выход кото-вывод которого подключен к выходу блока,
рого подключен к регулятору 3 напряженияРезистор 26 служит для настройки зоасинхронного двигателя. Выход регулятораны действия (чувствительности) обратной
3 соединен со статорными обмотками асин-связи. Резистор 27 ограничивает величину
хронного электродвигателя 4, вал котороготока, протекающего через стабилитрон 28, механически связан с валом электродвига- 20 который ограничивает величину напряжения
теля 5 постоянного тока и валом тахоге-на выходе блока. Резистор 29 выполняет
нератора 6.функцию защиты стабилитрона от перенаРоторные обмотки электродвигателя 4пряжения. Резистор 30 ограничивает ток,
соединены с входом трехфазного мостовогопротекающий на выходе блока по цепи
выпрямителя 7, выход которого соединен собратной связи, и тем самым позволяет обмоткой якоря электродвигателя 5 постоян- - регулировать глубину обратной связи, выраного тока.жающуюся в стабильности поддержания
Выход тахогенератора 6 соединен с вхо-заданной частоты вращения,
дом блока 8 обратной связи, один выходС помощью резистора 26 блок настраикоторого соединен с входом регулятора 3,вается таким образом, что после замыкания а второй выход - с выходом первого Q контакта 13 и разгона двигателей 4 и 5
интегратора 9. Второй выход последнего сое-до третьей ступени частоты вращения дейдинеи с входом регу;1ятора 3. Привод центри-ствие обратной связи прекращается. Это
фуги имеет релейную схему 10, замыкаю-необходимо для того, чтобы исключить вред(пие 11 13 и размыкающие 14 и 15 кон-ное влияние обратной связи при дальнейтакты. Один вход интегратора 9 соединентем регулировании частоты вращения из- с выходами нормально разомкнутых кон- 5 менением тока в обмотке 20 возбуждения, тактов 11 -13, входы которых соединены с
выходами задатчиков 16-18 режима асин-Интеграторы 9 и 22 (фиг. 3) каждый
хронного двигателя соответственно, вторыесодержит резистор 31 с переменным сопровыходы задатчиков 16-18, соединены междутивлением, который последовательно соедисобой и с вторым входом интегратора 9.нен с резистором 32, второй вывод ко- Входы задатчиков 16-18 соединены парал- 40 торого соединен с эмиттером транзистора
45
лельно между собой и с выходом блока 19 питания, вход которого соединен с двумя фазами трехфазной сети.
Обмотка 20 возбуждения электродвигателя 5 ностоянного тока подключена к выходу регулятора 21 напряжения обмотки возбуждения, который получает питание от общей трехфазной сети. Входы регулятора 21 напряжения обмотки возбуждения связаны с выходами второго интегратора 22. Один вход интегратора 22 соединен с выходами Q нормально замкнутых контактов 14 и 15, которые соединены между собой. Входы контактов 14 и 15 соединены с выходами задатчиков 23 и 24 режима двигателя постоянного тока соответственно, входы которых сое33. Коллектор и база транзистора 33 подключены к диагонали выпрямительного моста 34. Вторая диагональ моста 34 подключена одним выводом к входу, а другим к выходу. Параллельно выходу вютючен конденсатор 35.
Интеграторы предназначены для преобразования быстрых изменений входного напряжений в линейно зависимое от времени выходное напряжение постоянного тока.
Привод центрифуги (фиг. 1) работает следующим образом.
После включения автоматического выключателя 1 получают питание регулятор 21, блоки 19 и 25 питания и релейная схема 10. В результате от блока 25 через
динены параллельно между собой и с одним 55задатчики 23 и 24 и контакты 14 и 15
выходом блока 25 питания. Второй входпа выход интегратора 19 поступает сигнал,
интегратора 22 соединен с вторым выходомкоторый на его выходе нарастает с заданблока 25. Вход блока 25 соединен с дву-ной интенсивностью до значения, обуславмя фазами трехфазной сети. К этим желивающего номинальное напряжение на выхофазам подключена релейная схема 10, которая управляет контактором 2.
Блок 8 обратной связи (фиг. 2) содержит резистор 26 с переменным сопротивлением, выводы которого подключены к входу
блока, а подвижный контакт соединен с одним выводом резистора 27, второй вывод которого соединен с катодом стабилитрона 28. Анод последнего соединен с резистором 26 и входом блока. Параллельно
стабилитрону 28 включен резистор 29, один вывод которого соединен с катодом стабилитрона 28 и подключен к выходу блока, а второй вывод соединен с анодом стабилитрона 28 и одним выводом резистора 30 переменного сопротивления, второй
нен с резистором 32, второй вывод ко- торого соединен с эмиттером транзистора
33. Коллектор и база транзистора 33 подключены к диагонали выпрямительного моста 34. Вторая диагональ моста 34 подключена одним выводом к входу, а другим к выходу. Параллельно выходу вютючен конденсатор 35.
Интеграторы предназначены для преобразования быстрых изменений входного напряжений в линейно зависимое от времени выходное напряжение постоянного тока.
Привод центрифуги (фиг. 1) работает следующим образом.
После включения автоматического выключателя 1 получают питание регулятор 21, блоки 19 и 25 питания и релейная схема 10. В результате от блока 25 через
задатчики 23 и 24 и контакты 14 и 15
де регулятора 21. Напряжение на выходе регулятора 21 нарастает пропорционально с сигналом на входе. В результате через обмотку 20 возбуждения протекает номинальный ток.
С помощью релейной схемы 10 включается контактор 2 и замыкается контакт 11, который подключает задатчик 16 к входу интегратора 9. От задатчика 16 через контакт 11 на вход интегратора 9 поступает сигнал, соответствующий первой ступени частоты вращения двигателей 4 и 5 и тахогенератора 6. В результате на выходе интегратора 9 появляется сигнал, который плавно нарастая поступает на вход регуляДля перехода на вторую ступень частоты вращения с помощью релейной схемы 10 размыкают контакт 11 и замыкают контакт 12. При этом задатчик 16 отключается, а задатчик 17, настроенный на боль- щую частоту вращения, подключается. В результате на входе интегратора 9 сигнал
увеличивается скачком, а сигнал начинает увеличива
на его выходе ься до нового
значения с заданной интенсивностью. Это 10 приводит к увеличению результирующего сигнала на входах регулятора 3, а соответственно, увеличению напряжения на статоре двигателя 4. В результате чего двигатели 4 и 5 с тахогенератором 6 разготора 3 и на выход блока 8 обратной .с няются до нового значения частоты враще- связи, откуда с второго выхода поступает ния. Работа тахогенератора и блока 8
обратной связи происходит аналогично.
на второй вход регулятора 3. Таким образом на входы регулятора 3 поступает результирующий сигнал, равный разности сигналов, снимаемых с интегратора 9 и блока 8.
По мере плавного нарастания сигнала на входах регулятора 3 нарастает напряжение на его выходе, которое поступает на статорные обмотки двигателя 4, трансформируется в цепь ротора и после вы- - прямления в выпрямителе 7 поступает на якорную обмотку электродвигателя 5. В результате двигатели 4 и 5 и тахогенератор 6 начинают плавно разгоняться до первой ступени частоты вращения.
По мере разгона сигнал, поступающий с зо тахогенератора 6 на вход блока 8, увеличивается, что приводит к увеличению сигнала на выходе блока 8 и уменьшению результирующего сигнала на входах регулятора 3. В результате интенсивность разгона двигателей 4 и 5 с тахогенерато- з5
Для перехода на третью ступень частоты вращения с помощью релейной схемы 20 10 размыкают контакт 12 и замыкают контакт 13. При этом задатчик 17 отключается, а задатчик 18 подключается к входу интегратора 9. Далее процесс протекает аналогично. По окончании процесса на выходе регулятора 3 устанавливается напряжение, равное номинальному напряжению сети. Однако частота вращения двигателей 4 и 5 с тахогенератором 6 в данной схеме включения еще не достигает номиналь- ного значения.
Дальнейщее увеличение частоты вращения осуществляется уменьшением тока возбуждения в обмотке 20 возбуждения двигателя 5 путем снижения напряжения до нуля на выходе регулятора 21. Для этого с помощью релейной схемы 10 размыкают контакт 14, отключив тем самым
ром 6 снижается. При некотором соотношении сигналов, поступающих с. выходов интегратора 9 и блока 8, задаваемом за- датчиком 16, разгон прекращается и привод работает в установившемся режиме. При этом часть нагрузки воспринимает электродвигатель 4, а часть электродвигатель 5. Распределение нагрузок между двигателями, в данном случае, зависит от скольжения ротора асинхронного двигателя 4. Причем, чем больше скольжение, тем боль- .t- щую часть нагрузки воспринимает двигатель 5.
Тахогенератор и блок 8 в данном приводе выполняют стабилизирующую функцию. Например, при отклонении частоты вращения вниз от заданной сигнал, поступающий от тахогенератора 6 на блок 8, снижается, что приводит к снижению сигнала на выходе блока 8 и увеличению результирующего сигнала, поступающего на вход регулятора 3. В результате увеличивается наодин задатчик 23. В результате сигнал на входе интегратора 22 уменьшается, что приводит к снижению сигнала на выходе интегратора 22, входе регулятора 21 и снижению напряжения на выходе регулятора 21 40 и тока в обмотке 20. Снижение тока в обмотке 20 приводит к снижению электродвижущейся силы (ЭДС) на якорной обмотке двигателя 5, включенной встречно-параллельно через выпрямитель 7 к роторным обмоткам двигателя 4. В результате этого возрастает ток в роторной цепи и увеличивается крутящий момент двигателя 4, который и заставляет двигатель 4 разгоняться до частоты вращения, при которой вновь восстанавливается равенство ЭДС двигателей 4 и 5.
Для разгона двигателей 4 и 5 до частоты вращения, близкой к номинальной, с помощью релейной схемы 10 размыкается контакт 15 и отключается задатчик 24. В результате сигнал на входе интегратора 22
50
пряжение на выходе регулятора 3 и час-55 равен нулю, а это приводит к снижению
тота вращения двигателей 4 и 5 с тахо-- У-т сигнала па выходе интегратора
генератором 6 возрастает. Аналогичный про-22 и, соотвстствеппо, снижению до нуля
цесс протекает при отклонении частотынапряжения на выходе регулятора 21.
вращения вверх от заданной.При этом ток в обмотке 20 возбуждения
Для перехода на вторую ступень частоты вращения с помощью релейной схемы 10 размыкают контакт 11 и замыкают контакт 12. При этом задатчик 16 отключается, а задатчик 17, настроенный на боль- щую частоту вращения, подключается. В результате на входе интегратора 9 сигнал
увеличивается скачком, а сигнал начинает увеличива
на его выходе ься до нового
значения с заданной интенсивностью. Это приводит к увеличению результирующего сигнала на входах регулятора 3, а соответственно, увеличению напряжения на статоре двигателя 4. В результате чего двигатели 4 и 5 с тахогенератором 6 разго
Для перехода на третью ступень частоты вращения с помощью релейной схемы 10 размыкают контакт 12 и замыкают контакт 13. При этом задатчик 17 отключается, а задатчик 18 подключается к входу интегратора 9. Далее процесс протекает аналогично. По окончании процесса на выходе регулятора 3 устанавливается напряжение, равное номинальному напряжению сети. Однако частота вращения двигателей 4 и 5 с тахогенератором 6 в данной схеме включения еще не достигает номиналь- ного значения.
Дальнейщее увеличение частоты вращения осуществляется уменьшением тока возбуждения в обмотке 20 возбуждения двигателя 5 путем снижения напряжения до нуля на выходе регулятора 21. Для этого с помощью релейной схемы 10 размыкают контакт 14, отключив тем самым
один задатчик 23. В результате сигнал на входе интегратора 22 уменьшается, что приводит к снижению сигнала на выходе интегратора 22, входе регулятора 21 и снижению напряжения на выходе регулятора 21 и тока в обмотке 20. Снижение тока в обмотке 20 приводит к снижению электродвижущейся силы (ЭДС) на якорной обмотке двигателя 5, включенной встречно-параллельно через выпрямитель 7 к роторным обмоткам двигателя 4. В результате этого возрастает ток в роторной цепи и увеличивается крутящий момент двигателя 4, который и заставляет двигатель 4 разгоняться до частоты вращения, при которой вновь восстанавливается равенство ЭДС двигателей 4 и 5.
Для разгона двигателей 4 и 5 до частоты вращения, близкой к номинальной, с помощью релейной схемы 10 размыкается контакт 15 и отключается задатчик 24. В результате сигнал на входе интегратора 22
: снижается до нуля, что приводит к сниже- нию до нуля ЭДС двигателя 5, в резуль- тате чего ток в цепи ротора возрастает и двигатель 4 разгоняется до частоты вра- : щения, близкой к номинальной, когда ЭДС JB роторной цепи близко к нулю.
тором асинхронного двигателя, отличающийся тем, что, с целью повышения КПД, в него введены тахогенератор, блок обратной связи, регулятор напряжения обмотки возбуждения, первый и второй интеграторы, три задатчика режима асинхронного двигателя, два задатчика режима двигателя постоянного тока и релейная схема с тремя замыкающими и двумя размыкающими контактами, причем выводы тахогенеI Таким образом, путем соответствующей i настройки задатчиков 16-18, 23 и 24 дви(гателями 4 и 5 может быть задана лю- -;-,- д,,ены к входам блока обрат- |бая частоту вращения, на которой привод 0 один выход которого (может работать сколько угодно долго, одним выходом первого интегратора,
другой выход которого соединен с одним входом регулятора напряжения асинхронного двигателя другой вход которого соединен
гую и УВ - ; « п ня ТГТоо/ по с авЕГ ДрУгим выходом блока обратной связи, гулирования КПД на 15-20 по сравне- од ход первого интегратора соединен с „ию с известными системами генератор- „дНими выходами соответствующих задатчиков режимов асинхронного двигателя, другие выходы которых через соответствущие за- 20 мыкающие контакты релейной схемы соединены с другим входом первого интегратора, выходы второго интегратора соединены с входами регулятора напряжения обмотки возбуждения, один вход второго
бужленйГи я кор ём, вь1п рямитель и регуля-интегратора соединен с одними выходами
тоГнапряжения асинхронного двигателя, задатчков режимов двигателя постоянного мшичем обмотки фазного ротора соединенытока, другие выходы которых через соответ с в«)дом выпрямителя, выход которогоствующие размыкающие контакты релейной
юдключен к якорю двигателя постоянногосхемы соединены с другим входом второго
:тока, который механически соединен с ро-интегратора.
(обеспечивая при этом поддержание частоты I вращения на заданном уровне, плавный пе- реход с одной частоты вращения на дру1 двигатель.
jФормула изобретения
Привод центрифуги, содержащий асин- хронный двигатель с фазным ротором, дви- гатель постоянного тока с обмоткой возфиг. 2
тором асинхронного двигателя, отличающийся тем, что, с целью повышения КПД, в него введены тахогенератор, блок обратной связи, регулятор напряжения обмотки возбуждения, первый и второй интеграторы, три задатчика режима асинхронного двигателя, два задатчика режима двигателя постоянного тока и релейная схема с тремя замыкающими и двумя размыкающими контактами, причем выводы тахогене-;-,- д,,ены к входам блока обрат- один выход которого одним выходом первого интегратора,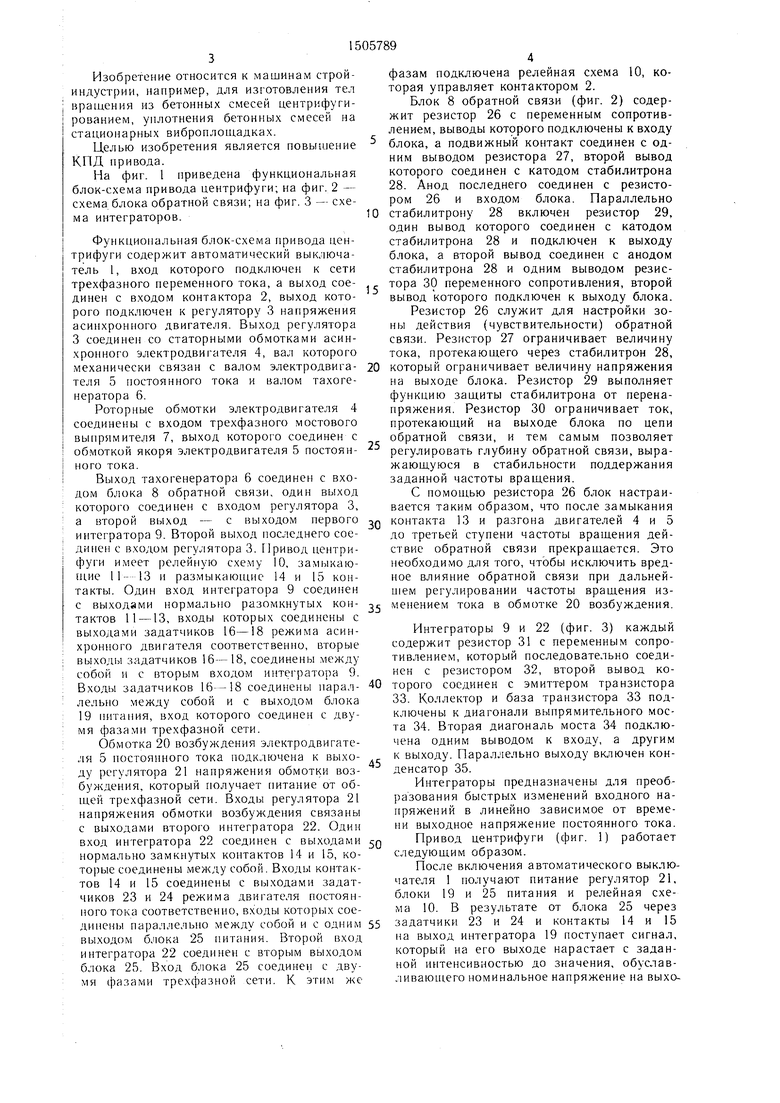
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Многодвигательный электропривод поточной линии | 1977 |
|
SU858196A1 |
| Система управления вибропогружателем | 1987 |
|
SU1516579A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Устройство регулирования скорости электродвигателя | 1983 |
|
SU1125600A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Управляемый вентильный электродвигатель | 1989 |
|
SU1700705A2 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
Изобретение относится к стройиндустрии, а именно к машинам для изготовления тел вращения из бетонных смесей центрифугированием, и может быть использовано при изготовления железобетонных изделий. Цель изобретения - повышение КПД. Привод содержит автоматический выключатель 1, контактор 2, регулятор напряжения 3 асинхронного двигателя 4, электродвигатель постоянного тока 5, тахогенератор 6, выпрямитель 7, блок 8 обратной связи, интегратор 9, релейную схему 10 с замыкающими 11 - 13 и размыкающими 14 и 15 контактами, задатчики 16 - 18 режима асинхронного двигателя, блок 19 питания, обмотку 20 возбуждения электродвигателя 5, регулятор 21 напряжения обмотки возбуждения, интегратор 22, задатчики 23 и 24 режима двигателя постоянного тока, блок 25 питания, резисторы, стабилитрон, транзистор, выпрямительный мост и конденсатор. 3 ил.
| Способ автоматического регулирования формованием трубчатых строительных конструкций центрифугированием | 1984 |
|
SU1220802A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Чиликни М | |||
| Г., Ключ ев В | |||
| И., Санд- лер А | |||
| С | |||
| Теория автоматизированного электропривода | |||
| - М.: Энергия, 1979, с | |||
| Шахтно-ступенчатая топка с цепной решеткой для торфа | 1920 |
|
SU443A1 |
