Изобретение относится к технологии изготовления электрических машин, в частности к изготовлению коллекторных электродвигателей, и может быть использовано для сборки малых электродвигателей, например электродвигателей с двойной изоляцией ручного механизированного инструмента.
Цель изобретения - обеспечение ме(фиг.2), в верхней части которых закреплена неподвижно средняя плита 14, Относительно средней неподвижной плиты 14 расположены две подвижные плиты 15 и 16. Нижняя плита 15, обращенная к основанию, снабжена пружинными захяатами 17, которые своими выступами 18 (фиг.З) взаимодействуют с поверхностью 19 (фиг.1) корпуса 1, при20
ханизации сборки электрической машины жимая его торцовую поверхность 20 к с выводами обмотки статора, проходя- плите 15. В средней неподвижной плите щими через отверстия в торцовой стен- 14 закреплены колонки 21 ке корпуса.
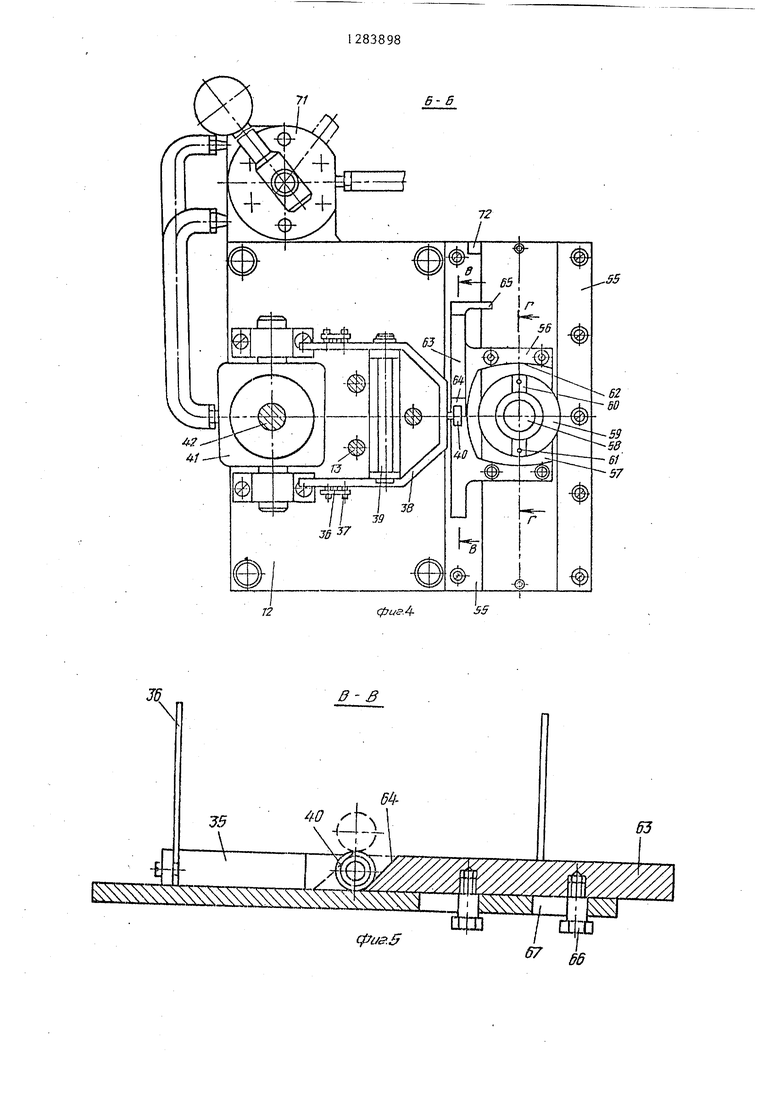
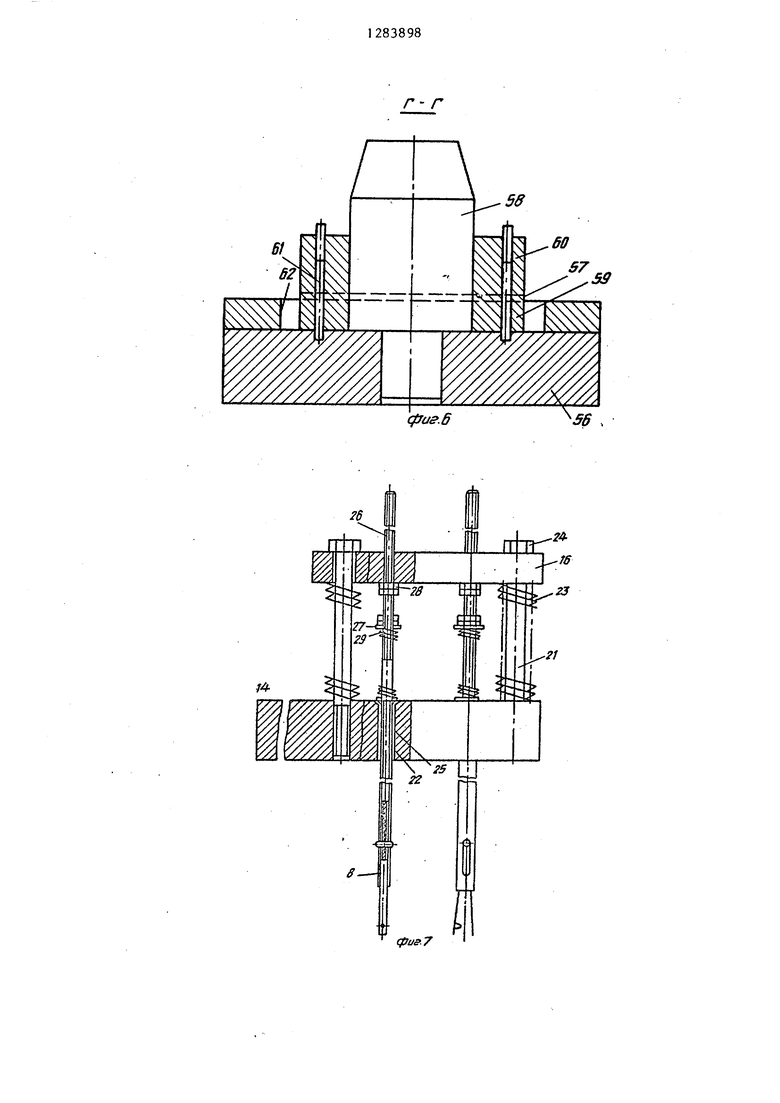
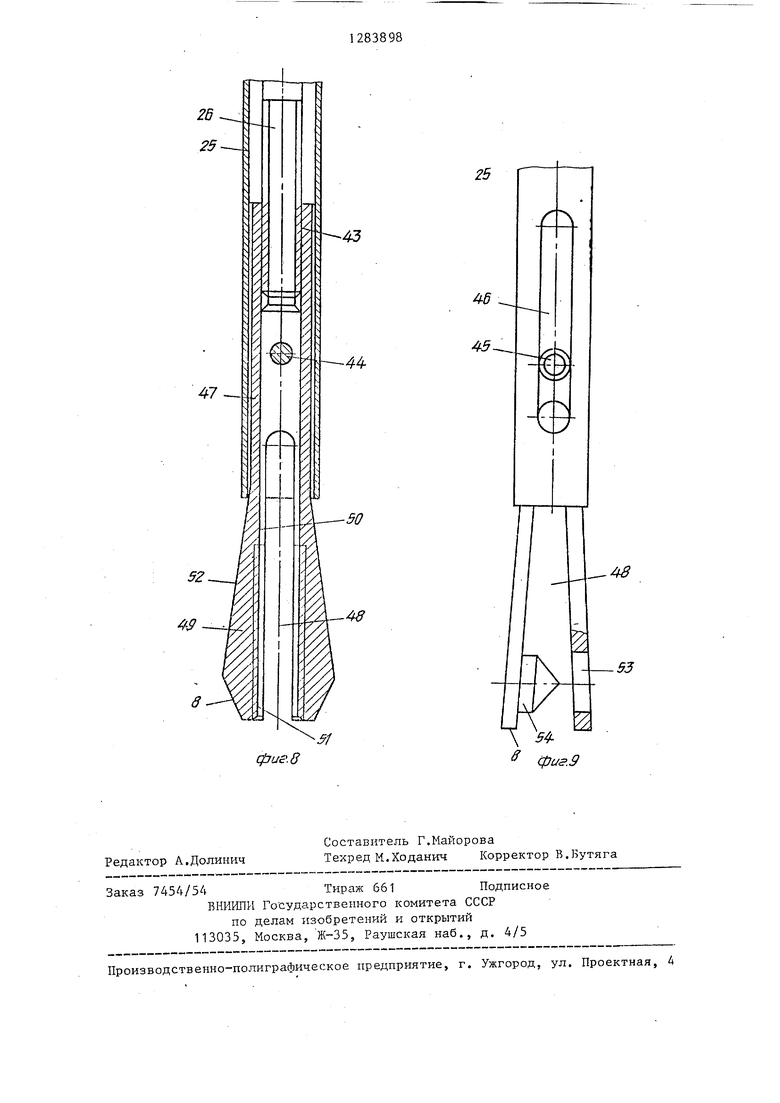
На фиг.1 показан корпус электрической машины в сборе со статором, про- - дольный разрез; на фиг.2 - устройство для реализации сборки статора с корпусом, общий вид; на фиг.З - вид А на фиг.2 устройства; на фиг.4 - разрез Б-Б на фиг.2; на фиг.З - разрез В-В на фиг.4; на фиг.6 - сечение Г-Г на фиг.4; на фиг.7 узел цангового захвата; на фиг.8, 9 - варианты исполнения цангового захвата.
Способ сборки электродвигателя заключается в том, что пластмассовый корпус 1 (фиг.1), имеющий глухую торцовую стенку 2 с отверстиями 3 для прохода выводов 4 обмоток 5, устанавливают для сборки (фиг,2) соосно статору 6. При этом корпус 1 устанав- ливают над статором 6 так, что их оси расположены на одной оси 7 вертикально и соосно. Через отверстия 3 вводят
25
30
закреплены колонки zi и имеются от- отверстия 22 (фиг.7).
На направляющих колонках 21 установлены пружины 23, а на них опирается верхняя подвижная плита 16. Пружины 23 служат для возврата плиты 16 в исходное положение, при котором она прижата к упорам 24 колонок 21.
В отверстиях 22 плиты 14 установлены направляющие гильзы 25, внутри которых проходят стержни 26, связанные со стороны обращенной к основанию 12 с цанговыми захватами 8,. а с противоположной стороны имеют упоры 27 и 28.
Упоры 27 регулируемые и обеспечивают требуемый натяг пружин 29, установленных на стержнях 26 над плитой 14, а упоры 28 прижаты к плите 16 и обеспечивают взаимодействие плиты 16 со стержнями 26. Приводом верхней подвижной плиты 26 является рычажный параллелограмм 30, у которого одна
цанговые захваты 8. Выводы 4 фиксиру--3-5 ось. 31 закреплена на неподвижной плиют цанговыми захватами 8 и натягивают в вертикальном положении параллельно оси 7, после чего перемещают корпус 1 в сторону статора 6, осуществляя сборку. При этом выводы 4 проходят через отверстия 3 корпуса 1, после чего выводы 4 освобождают от цанговых захватов.
Вертикальное расположение корпуса 1 и статора 6, натяг выводов 4 в на- правлезши вертикальной оси 7 и перемещение корпуса 1 при неподвижном статоре 6 с обмотками 5 и выводами 4 упрощает процесс сборки, позволяет
40
45
те 14, а противоположная ей ось 32 - на подвижной плите 16, при этом одна из сторон параллелограмма 30 выполнена в виде рычага 33, свободный конец которого 34 связан с двуплечим рычагом 35 гибкой связью 36 с помощью зажимов 37. Рычаг 35 имеет форму рамки 38 (фиг.4), расположен на оси 39 и на противоположном креплению гибкой Связи 36 конце имеет ролик 40.
Приводом штаней подвижной плиты 15 служит силовой цилиндр 41, шток которого 42 связан с плитой 15.
Цанговые захваты 8, как показано
выполнить его быстрее, так как исклю- на фиг.8 и 9, могут быть вьшолнены в
чается провисание выводов 4, их изгибразличных вариантах, общим для котои попадание между торцом 9 статора 6рых является то, что они связаны со
и боковыми стенками 10 и 11 корпу-стержнями 26, проходящими внутри наса 1.правляющих гильз 25, резьбой 43 и
Для реализации способа сборки кор-- штифтами 44, концы 45 которых распопуса 1 со статором 6 предназначеноложены в соответствующих пазах 46
устройство, содержащее основание 12гильз 25. Резьбовое соединение обес-
с закрепленными на ней стойками 13печивает регулировку положения захва(фиг.2), в верхней части которых закреплена неподвижно средняя плита 14, Относительно средней неподвижной плиты 14 расположены две подвижные плиты 15 и 16. Нижняя плита 15, обращенная к основанию, снабжена пружинными захяатами 17, которые своими выступами 18 (фиг.З) взаимодействуют с поверхностью 19 (фиг.1) корпуса 1, прижимая его торцовую поверхность 20 к плите 15. В средней неподвижной плите 14 закреплены колонки 21
жимая его торцовую поверхность 20 к плите 15. В средней неподвижной плите 14 закреплены колонки 21
закреплены колонки zi и имеются от- отверстия 22 (фиг.7).
На направляющих колонках 21 установлены пружины 23, а на них опирается верхняя подвижная плита 16. Пружины 23 служат для возврата плиты 16 в исходное положение, при котором она прижата к упорам 24 колонок 21.
В отверстиях 22 плиты 14 установлены направляющие гильзы 25, внутри которых проходят стержни 26, связанные со стороны обращенной к основанию 12 с цанговыми захватами 8,. а с противоположной стороны имеют упоры 27 и 28.
Упоры 27 регулируемые и обеспечивают требуемый натяг пружин 29, установленных на стержнях 26 над плитой 14, а упоры 28 прижаты к плите 16 и обеспечивают взаимодействие плиты 16 со стержнями 26. Приводом верхней подвижной плиты 26 является рычажный параллелограмм 30, у которого одна
ось. 31 закреплена на неподвижной пли
те 14, а противоположная ей ось 32 - . на подвижной плите 16, при этом одна из сторон параллелограмма 30 выполнена в виде рычага 33, свободный конец которого 34 связан с двуплечим рычагом 35 гибкой связью 36 с помощью зажимов 37. Рычаг 35 имеет форму рамки 38 (фиг.4), расположен на оси 39 и на противоположном креплению гибкой Связи 36 конце имеет ролик 40.
Приводом штаней подвижной плиты 15 служит силовой цилиндр 41, шток которого 42 связан с плитой 15.
Цанговые захваты 8, как показано
на фиг.8 и 9, могут быть вьшолнены в
та 8 относительно гильзы 25, а штифт 44 обеспечивает ориентацию захвата и препятствует ее саиоотвинчиванию.
Цанговый захват 8 (фиг.8) представляет собой втулку 47, которая одной стороной связана резьбой 43 со стержнем 26, а другая - имеет прорезь 48, которая образует два лепестка 49. Внутренняя их поверхность 50 выполнена цилиндрической с рифлениями 51, а наружная поверхность конусная 52 взаимодействует с гильзой 25, осуществляя при этом сжатие лепестков 49.
Цанговый захват 8 (на фиг.9) отличается от варианта на фиг.8 тем, что один из лепестков 49 имеет отверстие 53, а второй - выступ 54, расположенный против отверстия 53 и направленный в сторону этого отверстия.
На основании 12 (фиг.2) в направ- 20 ложены на оси 7 симметрии захватов
ляющих 55 установлена подвижная каретка 56 с гнездом 57. Гнездо 57 (фиг.6) образовано стержнем 58, установленным в каретке 56, и втулкой 59 с двумя выступами 60 и штифтами 61, которые одной стороной входят в каретку 56 для фиксации втулки 59, а другой стороной совместно с выступами 60 служат для фиксации статора 6 и поверхности 62 (фиг.4 и 6) с ;контуром,соответствующим контуру корпуса 1 для ориентации и фиксации его при установке в гнездо 57.
Далее каретку 56 перемещают из раНа каретке 56 установлена подвижная планка 63 с кулачковой поверхнос-35 бочей зоны вправо, при этом упор 72 тью 64, которая может взаимодейство- смещает планку 63 с кулачковой поверхностью 64 влево относительно каретки 56 на расстояние, которое могут переместиться винты 66 в пазу 67.
В гнездо 57 на выступы 60 и штифты 61 устанавливают статор 6 с обмотками 5 и выводами 4, направленными
вать с роликом 40. Планка 63 имеет ручку 65 для перемещения ее относительно каретки 56. Винты 66 (фиг.5), которые проходят через пазы 67 каретки 56 и ввернуты в планку 63, обеспечивают направление и ограничение
40
перемещения планки 63.
вверх в направлении параллельном оси 7 и перемещают каретку 56 в рабочую Каретка 56 имеет возможность зани-45 зону до срабатывания фиксатора 68,
при
мать три положения относительно оси 7: когда гнездо 57 смещено вправо или влево от оси 7 - каретка 56 находится вне рабочей збны устройства, когда гнездо 57 расположено по оси 7 - ка- jO ретка 56 находится в рабочей зоне устройства.
В каретке 56 (фиг.2) размещен фиксатор 68 с пружиной 69, а в направэтом статор 6 и корпус ,1 будут соосны между собой. При перемещении каретки в рабочую зону планка 63 кулачковой поверхностью 64 поднимает ролик 40 и поворачивает рычаг 35, ко торьй гибкой связью и рычажным параллелограммом 30 перемещает плиту 16, сжимая пружины 23, и через упоры 28, стержни 26 с цанговыми захватами 8
ляющих 55 имеется ответное гнездо 70.5 вниз, освобождая цанговые захваты 8 Фиксатор 68 фиксирует положение ка- от воздействия гильз 25. Лепестки 49 ретки 56, когда она находится в рабочей зоне устройства. В фиксированном . положении центр гнезда 57 каретки 56
расходятся, и в образовавшийся зазор через прорези 48 вводят соответствующие вьтоды 4. Далее перемещают за
расположен на оси 7 симметрии захватов 17.
Управление силовым цилиндром 41 осуществляется золотником 71. На основании 12 имеется упор 72 для взаимодействия с планкой 63.
Перед началом работы устройства подвижные плиты 15 и 16 установлены в верхнее положение, а каретка 56 смещена влево от оси 7. Вгнездо 57 соответственно поверхности 62 ставят корпус 1. Поскольку установку корпуса 1 производят вне рабочей зоны, определяемой осью 7, детали устройства не мец1ают этому.
После установки корпуса 1 каретку 56 перемещают до срабатьгеания фиксатора 68. В этом положении центр гнезда 57 вместе с корпусом 1 распо17. Переключениями золотника 71 управляют работой силового цилиндра 41, который перемещает шток 42 вместе с нижней плитой 15 сначала вниз до упора в торцовую поверхность 20 корпуса 1 , а захваты 17 своими выступами 18 удерживают корпус 1 за поверхности 19, а затем вместе с корпусом 1 - вверх, в исходное положение корпуса
1 при сборке, при этом направляющие гильзы 25 вместе с цанговыми захватами 8 пройдут сквозь отверстия 3 внутрь корпуса 1 (фиг.2).
Далее каретку 56 перемещают из рабочей зоны вправо, при этом упор 72 смещает планку 63 с кулачковой поверхностью 64 влево относительно каретки 56 на расстояние, которое могут переместиться винты 66 в пазу 67.
40
при
этом статор 6 и корпус ,1 будут соосны между собой. При перемещении каретки в рабочую зону планка 63 кулачковой поверхностью 64 поднимает ролик 40 и поворачивает рычаг 35, ко торьй гибкой связью и рычажным параллелограммом 30 перемещает плиту 16, сжимая пружины 23, и через упоры 28, стержни 26 с цанговыми захватами 8
вниз, освобождая цанговые захваты 8 от воздействия гильз 25. Лепестки 49
расходятся, и в образовавшийся зазор через прорези 48 вводят соответствующие вьтоды 4. Далее перемещают за
рукоятку 65 планку 63 вправо относительно каретки 56, при этом рычаг 35 поворачивается и перемещает рычажный параллелограмм 30 так, что плита 16, действием пружин 23, поднимается и освобождает упоры 28, и стержни 26 под действием пружин 29 также поднимаются вместе с цанговыми захватами 8,в результате гильзы 25 входят во
взаимодействие с конусной поверхностью О тов 8 при наладке устройства на раз52 цанговых захватов 8, обеспечивая зажим и натяжение выводов 4 в направлении, параллельном оси 7.
Передвигая золотник 71, перемещают плиту 15 с корпусом 1 вниз, осуществляя сборку корпуса 1 со статором 6, при этом выводы 4 протянуты через отверстия 3 корпуса 1 наружу.
Случаи изгиба, выводов 4 и попадания их между статором 6 и корпусом 1 исключены, так как выводы 4 натянуты и неподвижны, а корпус 1 перемещается строго в заданном направлении на неподвижный статор 6, поэтому скорость перемещения корпуса 1 при сборке может быть увеличена и производит перемещение приводом от пиевмоцилиндра 41 .
Затемj удерживая корпус 1 рукой (или любым тормозящим устройством),
личные варианты собираемых элементов. Положение цанговых захватов 8 относительно статора 6 и выводов 4 строго ориентировано, так как съемные штифты f5 44 своими выступающими концами 45 находятся в пазах 46 гильз 25. Это облегчает и ускоряет установку выводов 4 через прорези 48.
20 Формула изобретения
Способ сборки электрической машины, включающий центрирование корпуса в приспособлении, установку статора 2-5 в корпус и центрирование статора в приспособлении относительно корпуса, отличающийся тем, что, с целью обеспечения механизации сборки электрической машины с выводами обподнимают плиту 15, Поскольку 30 мотки статора, проходящими через отные захваты 17 не создают большого сопротивления, они легко освобождают корпус 1,
Далее перемещают каретку влево, при этом кулачковая поверхность 64 планки 63 поворачивает рычаг 35, который через связанные с ним детали перемещает вниз плитой 16 стержни 26 и освобождают цанговые захваты 8 от воздействия гильз 25, лепестки 49
цанговых захватов 8 расходятся и освобождают выводы 4. Корпус в сборке со статором удаляют из гнезда 57, а на освободившееся место устанавливают новый корпус 1 и начинают новый цикл сборки.
Резьбовое соединение цанговых захватов 8 со стержнями 26 позволяет регулировать положение цанговых захваичные варианты собираемых элементов. Положение цанговых захватов 8 относительно статора 6 и выводов 4 строго ориентировано, так как съемные штифты 44 своими выступающими концами 45 находятся в пазах 46 гильз 25. Это облегчает и ускоряет установку выводов 4 через прорези 48.
Формула изобретения
Способ сборки электрической машины, включающий центрирование корпуса в приспособлении, установку статора в корпус и центрирование статора в приспособлении относительно корпуса, отличающийся тем, что, с целью обеспечения механизации сборки электрической машины с выводами обверстия в торцовой стенке корпуса, после центрирования корпус перемещают вдоль оси приспособления, в отверстия корпуса вводят захваты, располагая
35 их параллельно оси приспособления, после центрирования статора выводы обмотки фиксирзпот в захватах, располагая выводы параллельно оси приспособления, а после установки корпуса,
40 на статор-выводы освобождают.
4-
26
2
12
Фиг.З
Б- Б
фиг. А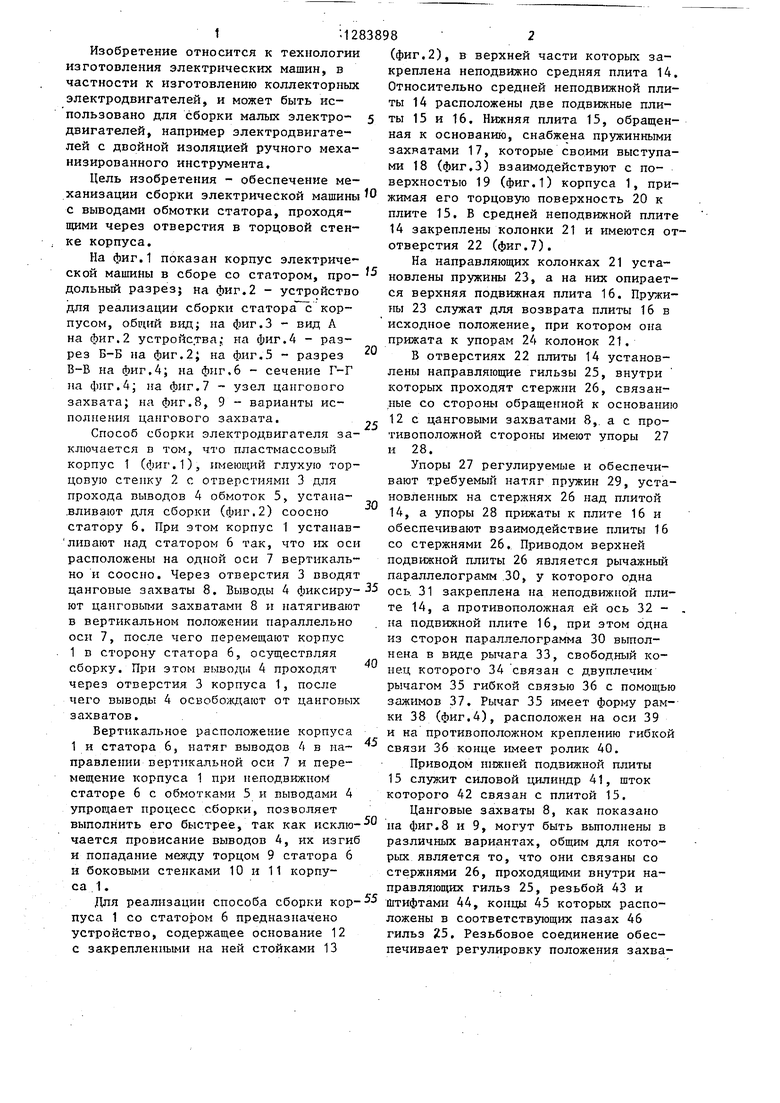
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки запрессовкой деталей типа вал-втулка | 1986 |
|
SU1333527A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| УСТРОЙСТВО к ПРЯДИЛЬНЫМ и КРУТИЛЬНЫМ МАШИНАМ для ОДНОВРЕМЕННОГО СЪЕМА ПОЧАТКОВ И НАДЕВАНИЯШПУЛЬ | 1969 |
|
SU247826A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Устройство для сборки проволочных контактов | 1988 |
|
SU1554040A1 |
| АВТОМАТ ДЛЯ ПРОБИВКИ ОТВЕРСТИЙ В ИЛАСТИНАХ И СБОРКИ ИХ СО СТЕРЖНЯМИ В ПАКЕТ | 1972 |
|
SU427765A1 |
| СТАНОК ДЛЯ СБОРКИ ГИБКОГО ЭЛЕЛАЕИТА С ЖЕСТКИМИ ДЕТАЛЯМИ | 1972 |
|
SU327961A1 |
| Устройство для вырубки деталей из полосового и ленточного материала | 1978 |
|
SU770827A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
Изобретение относится к технологии изготовления электрических машин, в частности к изготовлению коллекторных электрических машин с двойной изоляцией, и может быть использовано в рудных механизированных инструментах. Цель изобретения - обеспечение механизации сборки электрической машины с выводами обмотки статора, проходящими через отверстия в торцовой стенке корпуса. Пластмассовый корпус 1 устанавливают в приспособление для центрирования его относительно оси 7, перемещают корпус 1 вдоль оси приспособления, а статор 6 центрируют в приспособлении. Через отверстия в корпусе вводят цанговые захваты 8. Выводы 4 обмотки 5 ста то- ров фиксируют в захватах, располагая их параллельно оси 7. Перемещают корпус в сторону статора, осуществляя сборку. Выводы 4 проходят через отверстия корпуса. Вертикальное расположение корпуса и стопора, натяг выводов 4 параллельно оси 7 исключает провисание выводов, их изгиб и попадание между торцом стопора и боковой стенкой корпуса. 9 ил. J, /i jftjriar / f 15 (Л «/ 06863 фиъ.2
В-
(ffUff. f
Г- Г
cfJuff.S
(puff. 7
фие.8
Редактор А.Долиннч
Составитель Г.Майорова
Техред М.Ходанич Корректор В.Бутяга
Заказ 7454/54Тираж 661 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент США № 4263710, кл | |||
| Солесос | 1922 |
|
SU29A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
