Изобретение относится к радиотехнике и может быть использовано, например, для сборки проволочных контактов розеток соединителей для присоединения печатных плат.
Цель изобретения - расширение технологических возможностей устройства.
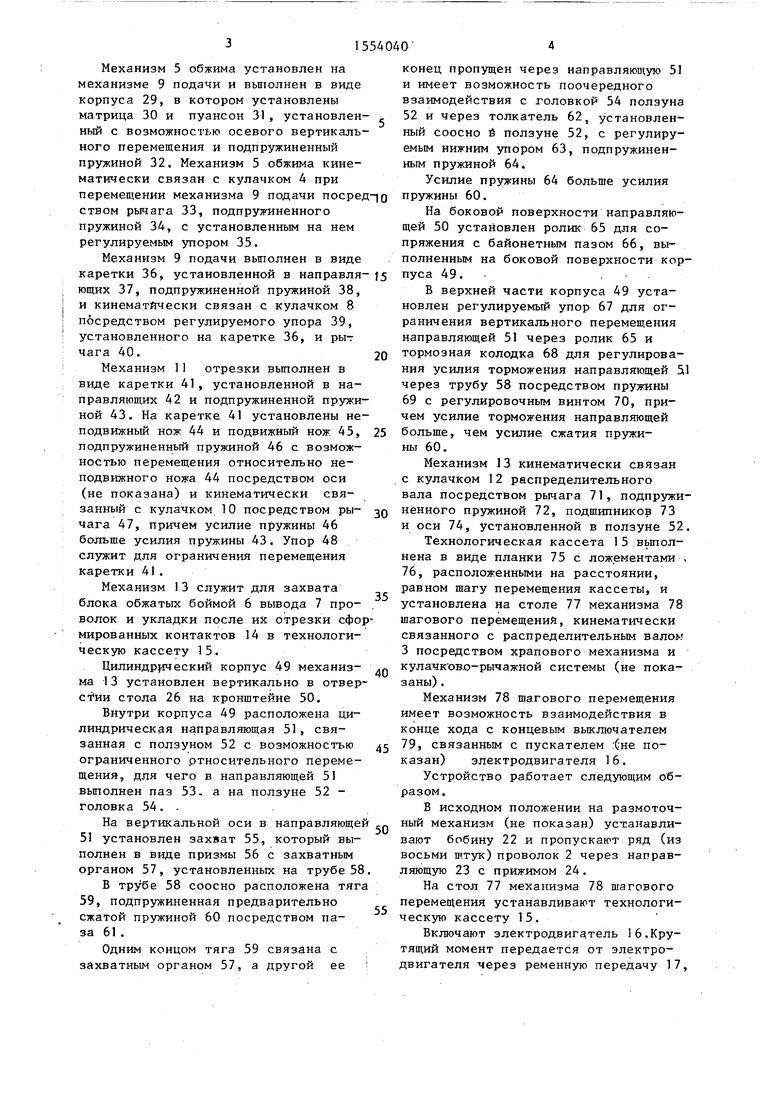
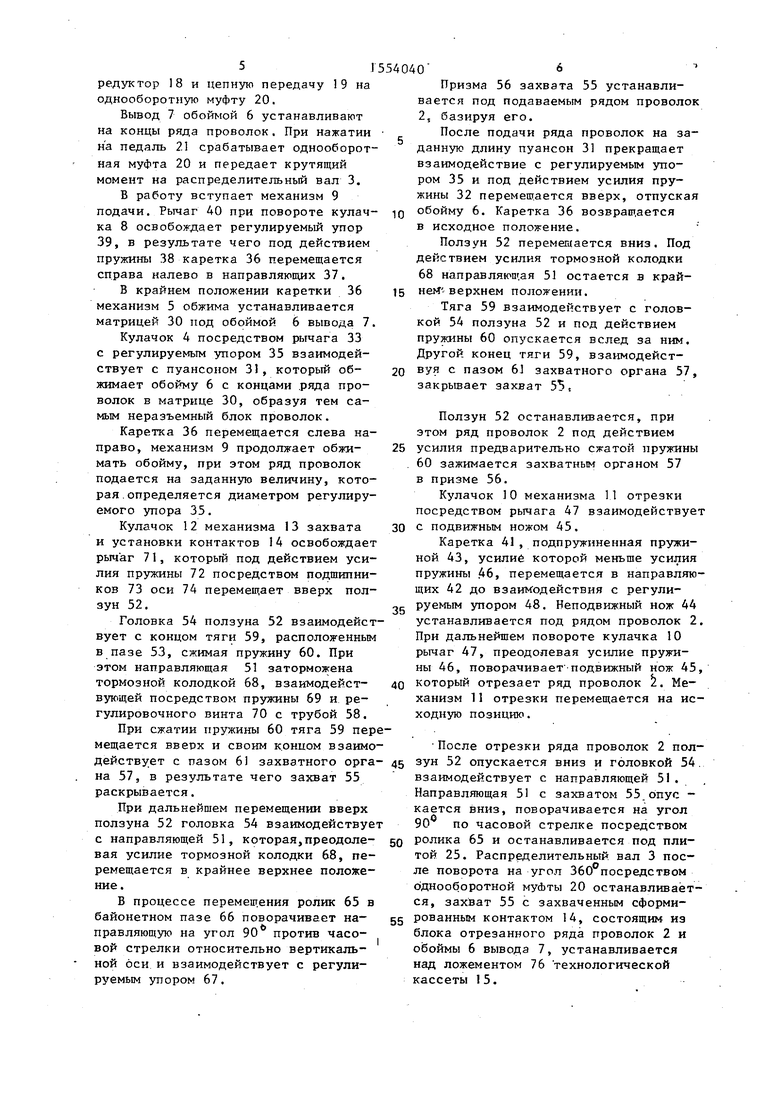
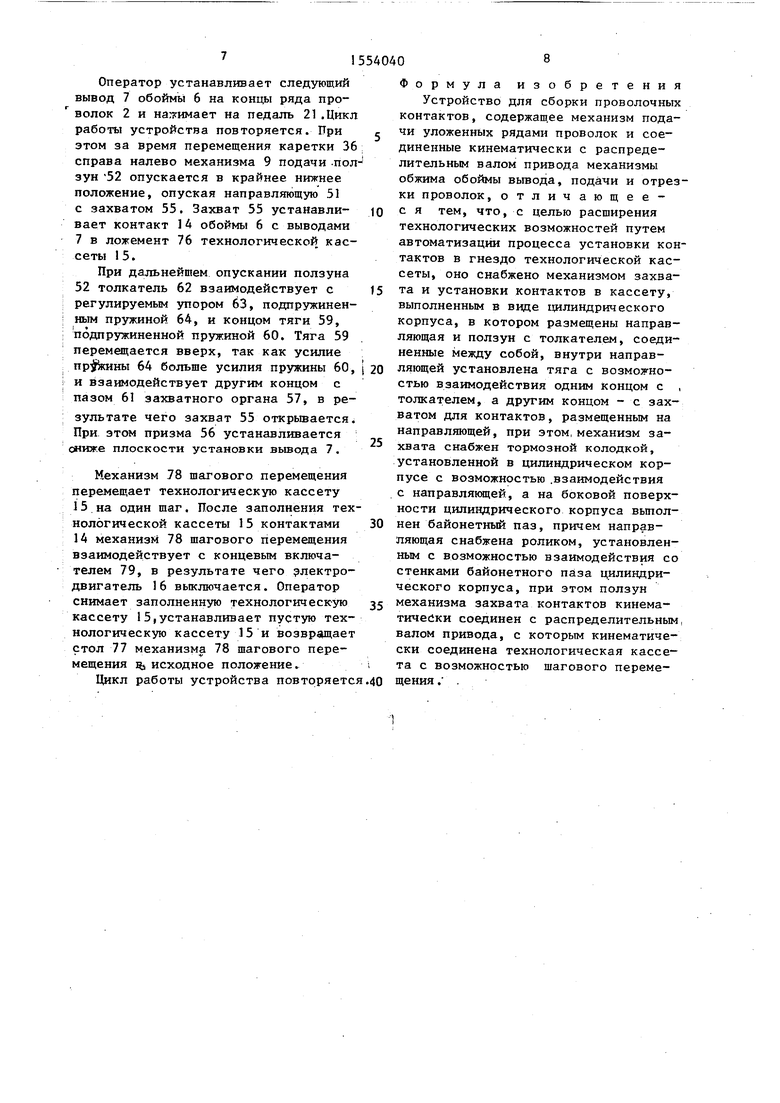
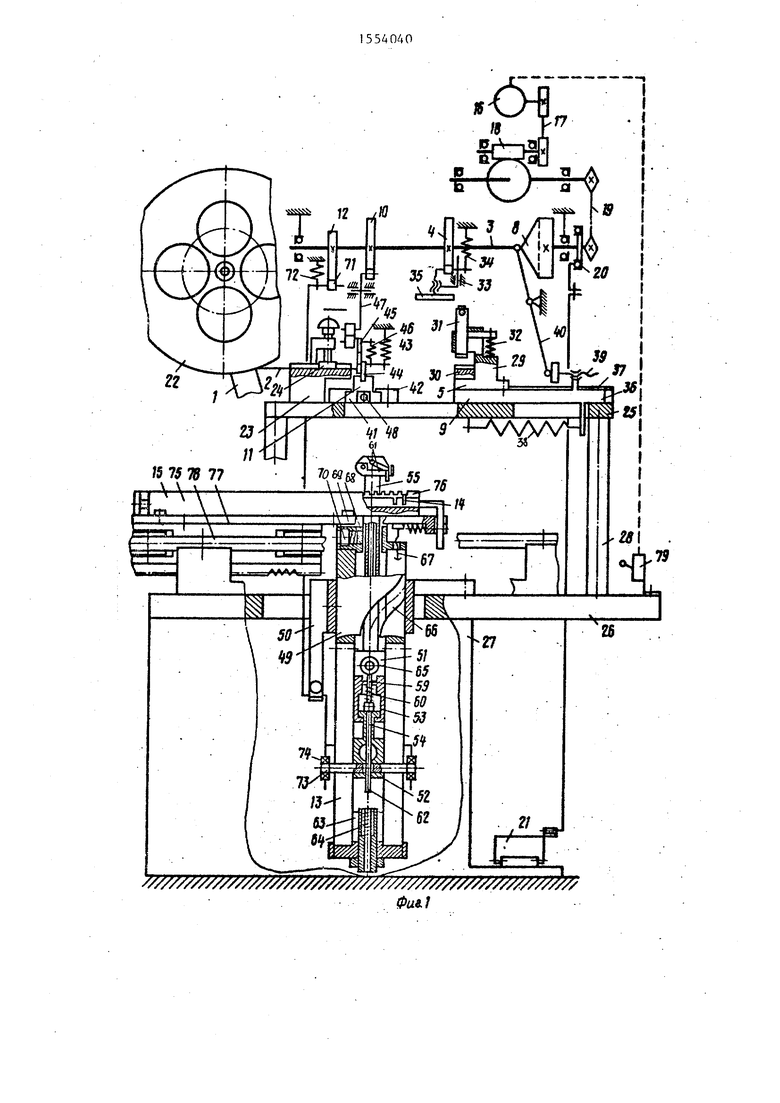
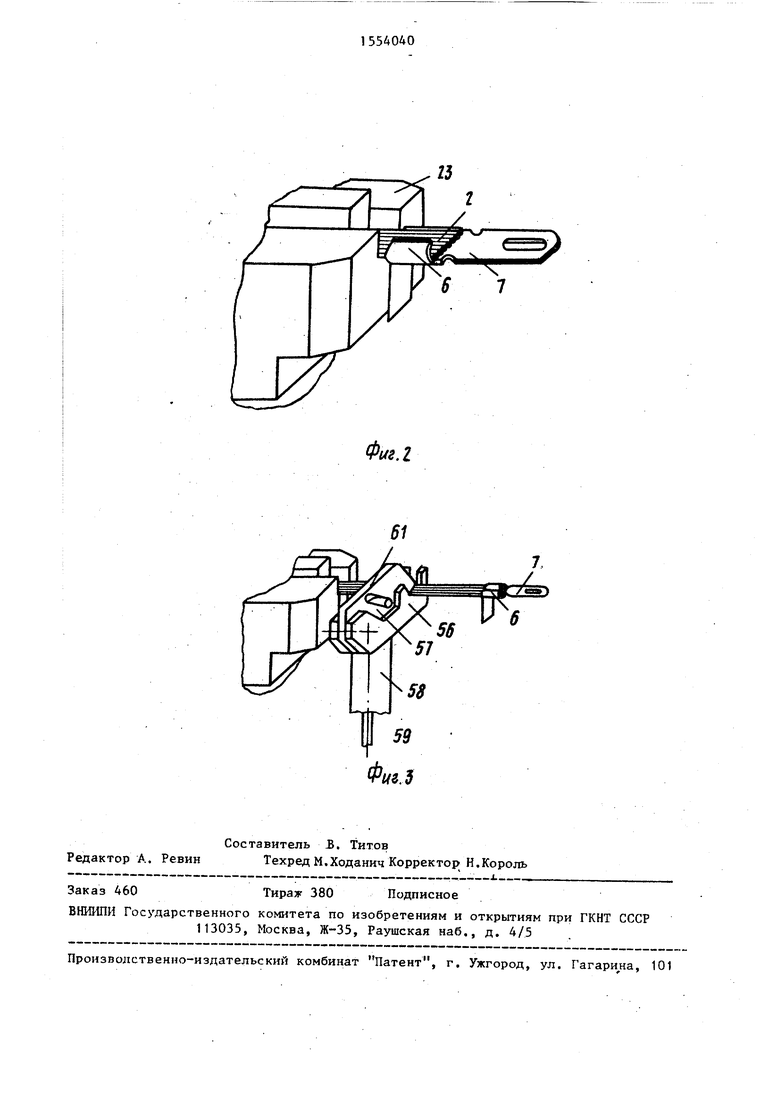
На фиг. I изображена кинематическая схема, устройства, общий вид; на фиг. 2 - вывод, установленный обоймой на концы проволок; на фиг. 3 - момент захвата блока обжатых обоймой вывода проволок перед их отрезкой.
Устройство содержит механизм 1 подачи уложенной рядами проволоки 2, распределительный вал 3, на котором установлены кулачок 4 механизма 5 обжима обоймы 6 вывода 7, кулачок 8 механизма 9 подачи, кулачок 10 механизма 11 отрезки, кулачок 12 мёханизма 13 захвата и установки контактов 14 и технологическую кассету 15. Для обеспечений прерывистого вращения распределительный вал 3 связан с электродвигателем 16 через ременную передачу 17, редуктор 18, цепную передачу 19 и однооборотную муфту 20, управляемую педалью 21.
Механизм 1 подачи сложенных рядами проволок 2 выполнен в виде бобины 22, установленной на размоточном механизме (не показан). Ряд (из восьми в предлагаемом устройстве) проволок 2 пропущен через направляющую 23 с прижимом 24, установленную на плите 25. Плита 25 установлена над столом 26 станины 27 посредством стоек 28. Под плитой 25 установлена технологическая кассета 15.
СП СП
Јь
Механизм 5 обжима установлен на механизме 9 подачи и выполнен в виде корпуса 29, в котором установлены матрица 30 и пуансон 31, установлен- ный с возможностью осевого вертикального перемещения и подпружиненный пружиной 32. Механизм 5 обжима кинематически связан с кулачком 4 при перемещении механизма 9 подачи посред ством рычага 33, подпружиненного пружиной 34, с установленным на нем регулируемым упором 35.
Механизм 9 подачи выполнен в виде каретки 36, установленной в направля- ющих 37, подпружиненной пружиной 38, и кинематически связан с кулачком 8 посредством регулируемого упора 39, установленного на каретке 36, и рыт чага 40.
Механизм 11 отрезки выполнен в виде каретки 41, установленной в направляющих 42 и подпружиненной пружиной 43. На каретке 41 установлены неподвижный нож 44 и подвижный нож 45, подпружиненный пружиной 46 с возможностью перемещения относительно неподвижного ножа 44 посредством оси (не показана) и кинематически связанный с кулачком 10 посредством рычага 47, причем усилие пружины 46 больше усилия пружины 43. Упор 48 служит для ограничения перемещения каретки 41.
Механизм 13 служит для захвата блока обжатых боймой 6 вывода 7 проволок и укладки после их отрезки сфомированных контактов 14 в технологическую кассету 15.
Цилиндрический корпус 49 механизма 1 3 установлен вертикально в отверстии стола 26 на кронштейне 50.
Внутри корпуса 49 расположена цилиндрическая направляющая 51, связанная с ползуном 52 с возможностью ограниченного ртносительного перемещения, для чего в направляющей 51 выполнен паз 53. а на ползуне 52 - головка 54.
0
з
0
5
0
конец пропущен через направляющую 51 и имеет возможность поочередного взаимодействия с головкой 54 ползуна 52 и через толкатель 62, установленный соосно в ползуне 52, с регулируемым нижним упором 63, подпружиненным пружиной 64.
Усилие пружины 64 больше усилия пружины 60.
На боковой поверхности направляющей 50 установлен ролик 65 для сопряжения с байонетным пазом 66, выполненным на боковой поверхности корпуса 49.
В верхней части корпуса 49 установлен регулируемый упор 67 для ограничения вертикального перемещения направляющей 51 через ролик 65 и тормозная колодка 68 для регулирования усилия торможения направляющей 5,1 через трубу 58 посредством пружины 69 с регулировочным винтом 70, причем усилие торможения направляющей больше, чем усилие сжатия пружины 60.
Механизм 13 кинематически связан с кулачком 12 распределительного вала посредством рычага 71, подпружиненного пружиной 72, подшипников 73 и оси 74, установленной в ползуне 52.
Технологическая кассета 15 выполнена в виде планки 75 с ложементами , 76, расположенными на расстоянии, равном шагу перемещения кассеты, и установлена на столе 77 механизма 78 шагового перемещений, кинематически связанного с распределительным валом 3 посредством храпового механизма и кулачк ово-рычажной системы (не показаны) .
Механизм 78 шагового перемещения имеет возможность взаимодействия в конце хода с концевым выключателем 79, связанным с пускателем -(не показан) электродвигателя 16.
Устройство работает следующим образом.
В исходном положении на размоточ-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |
| Установка для наплавки торцов зубьев шестерен | 1988 |
|
SU1593820A1 |
| Привод,преимущественно для устройства запрессовки штырей в плату | 1981 |
|
SU1075457A1 |
| Автомат для сборки | 1985 |
|
SU1391857A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Устройство для приварки анодов конденсаторов к рейкам и сборки реек в кассеты | 1977 |
|
SU736193A1 |
| Устройство для установки клиньев в пазы якорей электрических машин | 1980 |
|
SU920969A1 |
Изобретение относится к радиотехнике и может быть использовано для сборки проволочных контактов розеток соединителей. Цель изобретения - расширение технологических возможностей - достигается тем, что устройство снабжено механизмом захвата и установки контактов в кассету, выполненным в виде цилиндрического корпуса, внутри которого размещены направляющая и ползун с толкателем. Механизм захвата снабжен тормозной колодкой, установленной в цилиндрическом корпусе и взаимодействующей с направляющей. На боковой поверхности цилиндрического корпуса выполнен байонетный паз. Направляющая снабжена роликом, взаимодействующим со стенкой байонетного паза цилиндрического корпуса. 3 ил.
На вертикальной оси в направляющей ,0 ньгй механизм (не показан) уст.анавли ее -v. вают бобину 22 и пропускают ряд (из
восьми п тук) проволок 2 через направляющую 23 с прижимом 24.
На стол 77 механизма 78 шагового перемещения устанавливают технологическую кассету 15.
Включают электродвигатель 16.Крутящий момент передается от электро51 установлен захват 55, который выполнен в виде призмы 56 с захватным органом 57, установленных на трубе 58.
В трубе 58 соосно расположена тяга 59, подпружиненная предварительно сжатой пружиной 60 посредством паза 61 .
Одним концом тяга 59 связана с захватным органом 57, а другой ее
55
двигателя через ременную передачу 17,
двигателя через ременную передачу 17,
редуктор 18 и цепную передачу 19 на однооборотную муфту 20.
Вывод 7 обоймой 6 устанавливают на концы ряда проволок, При нажатии на педаль 21 срабатывает однооборот- ная муфта 20 и передает крутящий момент на распределительный вал 3.
В работу вступает механизм 9 подачи. Рычаг 40 при повороте кулач- ка 8 освобождает регулируемый упор 39, в результате чего под действием пружины 38 каретка 36 перемещается справа налево в направляющих 37.
В крайнем положении каретки 36 механизм 5 обжима устанавливается матрицей 30 под обоймой 6 вывода 7.
Кулачок 4 посредством рычага 33 с регулируемым упором 35 взаимодействует с пуансоном 31, который об- жимает обойму 6 с концами ряда проволок в матрице 30, образуя тем самым неразъемный блок проволок.
Каретка 36 перемещается слева направо, механизм 9 продолжает обжи- мать обойму, при этом ряд проволок подается на заданную величину, которая определяется диаметром регулируемого упора 35.
Кулачок 12 механизма 13 захвата и установки контактов 14 освобождает рычаг 71, который под действием усилия пружины 72 посредством подшипников 73 оси 74 перемещает вверх ползун 52.
Головка 54 ползуна 52 взаимодействует с концом тяги 59, расположенным в пазе 53, сжимая пружину 60. При этом направляющая 51 заторможена тормозной колодкой 68, взаимодейст- вующей посредством пружины 69 и регулировочного винта 70 с трубой 58.
При сжатии пружины 60 тяга 59 пермещается вверх и своим концом взаимодействует с пазом 61 захватного орга на 57, в результате чего захват 55 раскрывается.
При дальнейшем перемещении вверх ползуна 52 головка 54 взаимодействуе с направляющей 51, которая,преодоле- вая усилие тормозной колодки 68, перемещается в крайнее верхнее положение.
В процессе перемещения ролик 65 в байонетном пазе 66 поворачивает на- правляющую на угол 90 против часовой стрелки относительно вертикальной оси и взаимодействует с регулируемым упором 67.
Призма 56 захвата 55 устанавливается под подаваемым рядом проволок 2, базируя его.
После подачи ряда проволок на заданную длину пуансон 31 прекращает взаимодействие с регулируемым упором 35 и под действием усилия пружины 32 перемешается вверх, отпуская обойму 6. Каретка 36 возвращается в исходное положение.
Ползун 52 перемешается вниз. Под действием усилия тормозной колодки 68 направляющая 51 остается в крайнем верхнем положении.
Тяга 59 взаимодействует с головкой 54 ползуна 52 и под действием пружины 60 опускается вслед за ним. Другой конец тяги 59, взаимодействуя с пазом 6J захватного органа 57, закрывает захват 55 t
Ползун 52 останавливается, при этом ряд проволок 2 под действием усилия предварительно сжатой пружины 60 зажимается захватным органом 57 в призме 56.
Кулачок 10 механизма 11 отрезки посредством рычага 47 взаимодействуе с подвижным ножом 45.
Каретка 41 , подпружиненная пружиной 43, усилие которой меньше усилия пружины 46, перемещается в направляющих 42 до взаимодействия с регулируемым упором 48. Неподвижный нож 44 устанавливается под рядом проволок 2 При дальнейшем повороте кулачка 10 рычаг 47, преодолевая усилие пружины 46, поворачивает подвижный нож 45 который отрезает ряд проволок 2. Механизм 11 отрезки перемещается на исходную позицию.
После отрезки ряда проволок 2 ползун 52 опускается вниз и головкой 54 взаимодействует с направляющей 51. Направляющая 51 с захватом 55.опус - кается вниз, поворачивается на угол 90 по часовой стрелке посредством ролика 65 и останавливается под плитой 25. Распределительный вал 3 после поворота на угол 360°посредством однооборотной муфты 20 останавливается, захват 55 с захваченным сформированным контактом 14, состоящим из блока отрезанного ряда проволок 2 и обоймы 6 вывода 7, устанавливается над ложементом 76 технологической кассеты 15.
Оператор устанавливает следующий вывод 7 обоймы 6 на концы ряда про- волок 2 и нажимает на педаль 21.Цикл работы устройства повторяется. При с этом за время перемещения каретки 36 справа налево механизма 9 подачи .ползун 52 опускается в крайнее нижнее положение, опуская направляющую 51 с захватом 55. Захват 55 устанавли- ю вает контакт 4 обоймы 6 с выводами 7 в ложемент 76 технологической кассеты 15.
При дальнейшем опускании ползуна 52 толкатель 62 взаимодействует с 15 регулируемым упором 63, подпружиненным пружиной 64, и концом тяги 59, подпружиненной пружиной 60. Тяга 59 перемещается вверх, так как усилие пружины 64 больше усилия пружины 60, | 20 и взаимодействует другим концом с пазом 61 захватного органа 57, в результате чего захват 55 открывается. При этом призма 56 устанавливается ониже плоскости установки вывода 7.
25
Механизм 78 шагового перемещения перемещает технологическую кассету 15 на один шаг. После заполнения технологической кассеты 15 контактами 14 механизм 78 шагового перемещения взаимодействует с концевым включателем 79, в результате чего электродвигатель 16 выключается. Оператор снимает заполненную технологическую кассету 15,устанавливает пустую технологическую кассету 15 и возвращает стол 77 механизма 78 шагового перемещения ЕЛ исходное положение.
Цикл работы устройства повторяется
5 0
5
0 5
0
Формула изобретения Устройство для сборки проволочных контактов, содержащее механизм подачи уложенных рядами проволок и соединенные кинематически с распределительным валом привода механизмы обжима обоймы вывода, подачи и отрезки проволок, отличающее- с я тем, что, с целью расширения технологических возможностей путем автоматизации процесса установки контактов в гнездо технологической кассеты, оно снабжено механизмом захвата и установки контактов в кассету, выполненным в виде цилиндрического корпуса, в котором размещены направляющая и ползун с толкателем, соединенные между собой, внутри направляющей установлена тяга с возможностью взаимодействия одним концом с , толкателем, а другим концом - с захватом для контактов, размещенным на направляющей, при этом, механизм захвата снабжен тормозной колодкой, установленной в цилиндрическом корпусе с возможностью .взаимодействия с направляющей, а на боковой поверхности цилиндрического корпуса выполнен байонетный паз, причем направляющая снабжена роликом, установленным с возможностью взаимодействия со стенками байонетного паза цилиндрического корпуса, при этом ползун механизма захвата контактов кинематически соединен с распределительным, валом привода, с которым кинематически соединена технологическая кассета с возможностью шагового перемещения . .
///////////////////////////W
Фиг.
Редактор А. Ревин
Составитель Б. Титов
Техред М.Ходанич Корректор Н.Король
Заказ 460
Тираж 380
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фаг.I
Подписное
| Питательный кран для вагонных резервуаров воздушных тормозов | 1921 |
|
SU189A1 |
| НПО Темп. | |||
