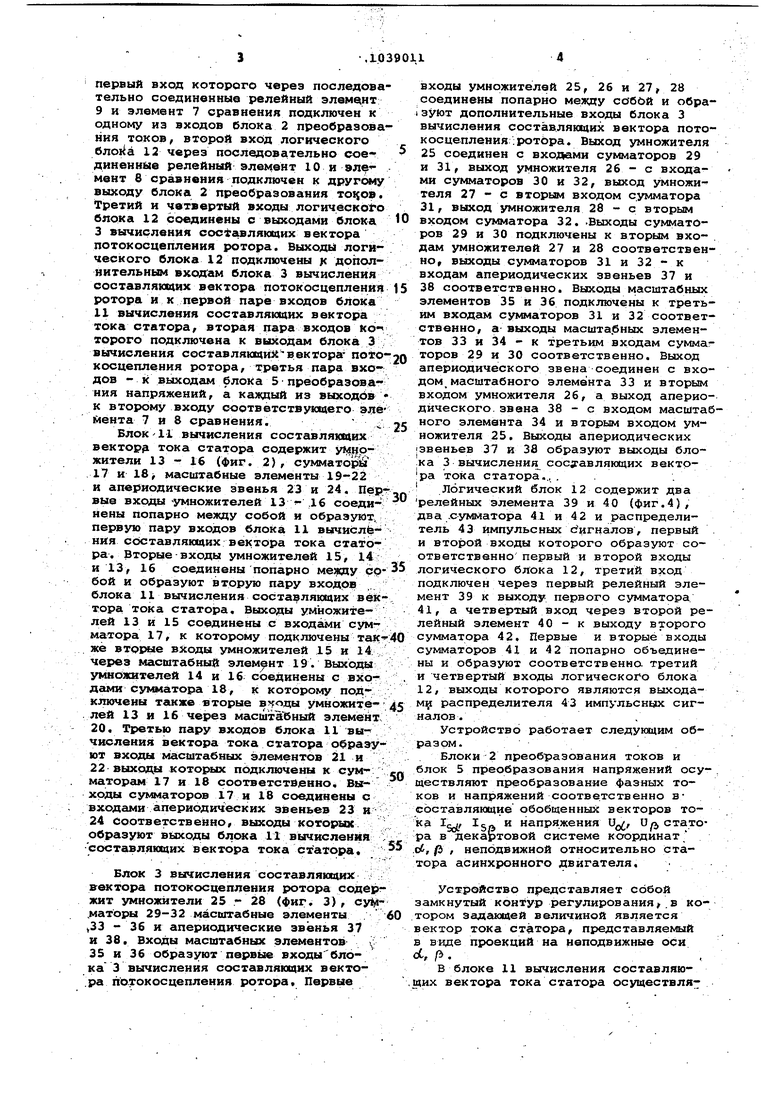
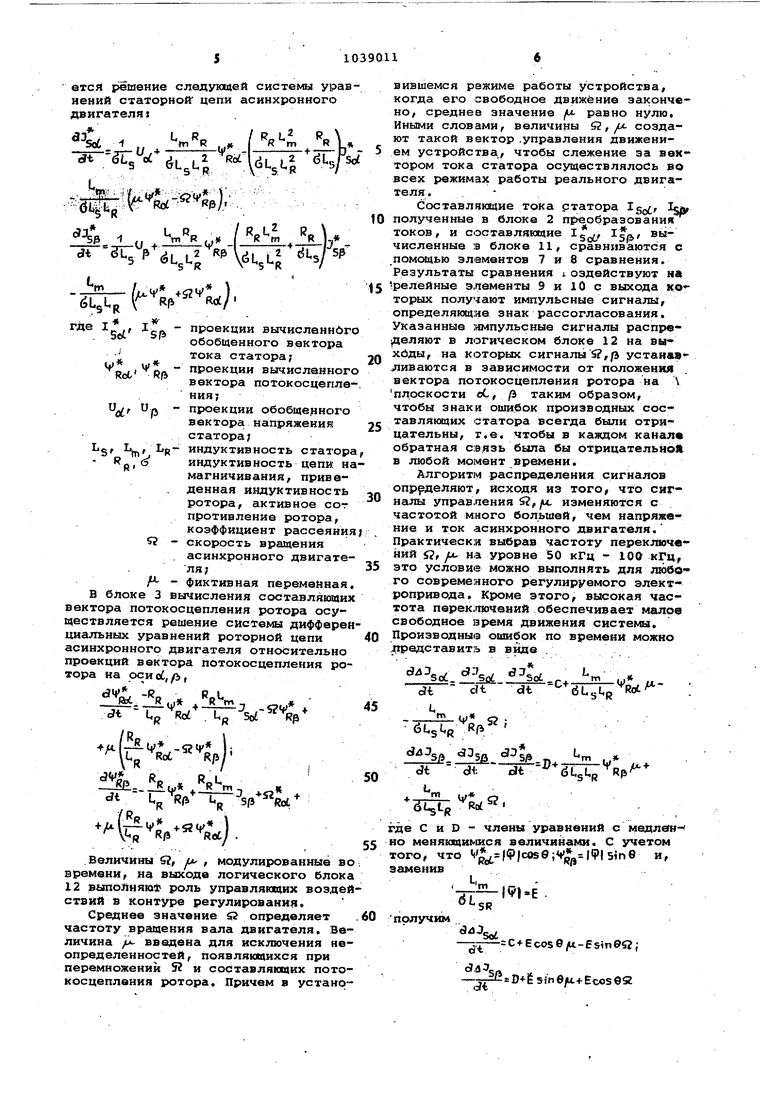
Иэобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения. Известно устройство для определения одной из координат асинхронного двигателя - скорости вращения, содер жащее электромеханический датчик, ус тановленный на валу двигателя. Известны также устройства для оп ределения координат асинхронного дви гателя - составляющих вектора потокосцепления ротора, содержащие датчи ки магнитного потока - датчики Холла и датчики ЭДС в виде измерительных обмоток 1.. Недостатком известных устройств является конструктивная сложность Наиболее близким к предлагаемому по технической сущности является уст ройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчи ки фазных токов статора, подключенные через блок преобразования токов к входам блока вычисления составляют щих вектора потокосцепления ротора, и датчики фазных напряжений, подключенные к блоку преобразования напряжений . Недостатком является то, что данное устройство не содержит электромеханического датчика скорости, датчиков потока и ЭДС, усложняющих Koriструкцию. Кроме того, недостатком является то, что определение координат асинхронного двигателя - скорости вращения и составляющих век-тора потокосцепления ротора производится здесь по информации о фазных токах и напряжениях в разомкнутом контуре, и это не позволяет получить высокую точность, особенно в динамических ре жимах. Цель изобретения - повышение точности определения координат асинхрон ного двигателя в статических и динамических режимах работы. Указанная цель достигаётся тем, ЧТО в устройство для определения координат асинхронного двигателя в регулируемом электроприводе, содержащее датчики фазных токов статора, подключенные к блоку преобразования токов, два выхода которого соединены с первыми двумя входами блока вы|числения состгшляющих вектора потоке сцепления ротора, и датчики фазных напряжений статора, подключенные к блоку преобразования напряжений, введены два элемента сравнения, двг1 релейных элемента, блок вычисления составляющих вектора тока статора и логический блок, первый вход которого через последовательно.соединенные первый релейный элемент и .первый элемент сравнения подключен к одному из выходов блока преобразования токов, второй вход через последовательно соединенные второй релейный элемент и второй элемент сравнения - к другому выходу блока преобразования токов; третий, и четвертый входы соединены с выходами блока вычисления составляющих вектора потокосцепления ротора, а выходы логического блока подключены к дополнительным входам блока вычисления составляющих вектора потокосцепления ротора и к первой паре входов блока вычисления состав-, ляющих вектора тока статора, вторая пара входов которого подключена к выходам блока вычисления составляю-л щих вектора потокосцепления ротора, третья пара входов - к выходам блока преобразования напряжений, а каждый из выходов - к второму входу соответствующего элемента сравнения. Кроме того, логический блок содер-; жит два релейных элемента, два сумма ора и распределитель импульсных сигналов, первый: и второй входы которого образуют соответственно первый и второй входы логического блока, третий вход подключен через первый релейный элемент к выходу первого . сумматора, четвертый вход через второй релейный элемент - к вькоду второго сумматора, при этом первые и вторые входы сумматоров попарно .объединены и образуют соответственно третий и четвертый входы логического блока, выходы которого являются выходами распределителя импульсных сигналов . На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - структурная схема блока вычисления составляющих вектора тока статора; на фиг 3 - структурная схема блока вычисления составляющих вектора потокосцепления ротора; иа фиг. 4 - структурная схема логического блока; иа фиг. 5 - диаграмма работы логического блока. Устройство для определения координат асинх;ронного двигателя в регулируемом электроприводе содержит датчи- , ки 1{фиг. I) фазных токов статора, подключенные к блоку 2 преобразова- ния токов два выхода которого соединены с первыми двумя входами блока 3 вычисления составляющих вектора потокосцеплен:ия ротора. Устройство содержит также датчики 4 фазных напряжений статора, подключениые к |5локу 5 преобразования нааряжений. Датчики 2 фазных токов и датчики 4 фазных напряжений включены в цепь статора асинхроииого двигателя 6. Кроме того, устройство содержит также два элемента 7 и 8 сравнения два релейных элемента,9 и 10, блок 11 вычисления сосд авлякщих вектора ока статора и логический блок 12, первый вход которого через последова тельно соединенные релейный элемент 9 и элемент 7 сравнения подключен к одному из входов блока 2 преобразова ния токов, второй вход логического 12 через последовательно соет диненные релейный элемент 10 и эл мент 6 сравнения подключен к другому выходу блока 2 преобразования . Третий и четвертый входы логического блока 12 соединены с выходами блока 3 вычисления составляющих вектора потокосцеплеиия ротора. Выходы логического блока 12 подключены к дополнительным входам блока 3 вычисления составляющих вектора потокосцепления ротора и к первой паре входов блоке 11 вычисления составляющих вектора тока статора, вторая пара входов ко- тррого подключена к выходам блока 3 вычисления составляющиэс/вектора- noiro косцепления ротора, третья пара входов - к выходам блока 5 преобразования напряжений, а каждый из выходбв к второму входу соответствующего эдё ента 7 и 8 сравнения. ; БлокII вычисления составлякЩих векторд тока статора содержит y y |jpжители 13-16 (фиг. 2), сумма-гор й 17 и 18f масштабные элементы 19-22 и апериодические звенья 23 и 24. Пер вые входы-умножителей 13 - .16 соединены попарно между собой и образзпот, первую пару входов блока 11 вычисл -ния составляющих вектора тока статора. Вторые входы умножителей 15, 14 и 13, 16 соединены попарно меясду со бой и образуют вторую пару входов блока 11 вычисления составляющих вектора тока статора. Выходы умножителей 13 и 15 соединены с входами сумматора 17, к которому подключены так же вторые входы умножителей 15 и 14 через масштабный элемент 19. Выходы умножителей 14 и 16 соединены с входами сумматора 18, к которому подключены также вторые умножителей 13 и 16 через мас1итаГбный элемент 20. Третью пару входов блока 11 вычисления вектора тока статора образу ют входы масштабных элементов 21 и 22-выходы которых подключены к сумматорам 17 и 18 соответственно. Выходы сумматоров 17 и 18 соединены с входами апериодических звеньев 23 и 24 Соответственно, выходы кoтopыx образуют выходы блока 11 вычисления составляющих вектора тока статора Блок 3 вычисления составляющих . вектора потокосцепления ротора содер жит умножители 25 .- 28 (фиг. 3) , cyi .маторы 29-32 масштабные элементы уЗЗ - 36 и апериодические звенья 37 и 38. Входы масштабных элементов : 35 и 36 образуют первые входы блока 3 вычисления составляющих вектора потокосцепления ротора. Первые входы умножителей 25, 26 и 27, 28 соединены попарно между соббй и образуют дополнительные входы блока 3 вычисления составляющих вектора потокосцепления : ротора. Выход умножителя 25 соединен с входами сумматоров 29 и 31, выход умножителя 26 - с входами сумматоров 30 и 32, выход умножителя 27 - с вторым входом сумматора 31, выход умножителя 28 - с вторым входом сумматора 32. -Выходы сумматоров 29 и 30 подключены к вторым входгил умножителей 27 и 28 соответственно, выходы суг маторов 31 и 32 - к входам апериодических звеньев 37 и 38 соответственно. ВЕЛСОДЫ масштабных элементов 35 и 36 подключены к третьим входам сумматоров 31 и 32 соответственно, а-выходы масштабных элементов 33 и 34 - к третьим входам суммаг торов 29 и 30 соответственно. Выход апериодического звена соединен с входом, масштабного элемента 33 и вторым входом умножителя 26, а выход апериодического, звена 38 - с входом масштабного элемента 34 и вторым входом умножителя 25. Выходы апериодических Звеньев 37 и 38 образуют выходы бяока 3 вычисления составляющих вектрра тока статора.., . . i Логический блок 12 содержит два релейных элемента 39 и 40 (фиг.4), два -с-умматора 41 и 42 и распределитель 43 Импульсных Сигналов, первый и второй входы которого образуют соответственно первый и второй входы логического блока 12, третий вход подключен через первый релейный элемент 39 к выходу первого сумматора 41, а четверт.ый вход через второй релейный элемент 40 - к выходу второго сумматора 42. Первые и вторые входы сумматоров 41 и 42 попарно объединены и образуют соответственна третий и четвертый входы логического блока 12, выходы которого являются выходамр распределителя 43 импульсных сиг- налов. Устройство работает следунадим обраэрм. Блоки 2 преобразования токов и блок 5 преобразования напряжений осуществляют преобразование фазных токов и напряжений соответственно всоставляющие обобщенных векторов токА Icj so напряжения Ug, Up, статора в декартовой системе координат, .ct, ft , неподвижной относительно статора асинхронного двигателя. Устройство представляет собой замкнутый контур регулирования,.в котором задающей величиной является вектор тока ст 1тора, представляемый в виде проекций на неподвижные оси сС, р . в блоке 11 вычисления составляющих вектора тока статора осуществляатся решение следуквдей системы урав нений статорной цепи асинхронного двигателя проекции вычисленийг Sot обобщенного вектора тока статора; Ы ut проекции вычисланног Rot Kib вектора потокосцепле ния; проекции обобщенного вектора напряжения статора; Lp- индуктивность статор индуктивность цепи н магничивания, приведенная индуктивность ротора, активное сот противление ротора, коэффициент рассеяни Я - скорость вращения асинхронного двигате ля; / фиктивная переменная В блоке 3 вычисления составляющи вектора потокосцепления ротора осуществляется решение системы диффере циальных уравнений роторной цепи асинхронного двигателя относительно проекций вектора потокосцепления ро тора на осиоС,/2,, .лы р W R ы + -I оы J. Roi . I Л 5Ы RR. -5- if - 5 Ф IS ° , to RP (И RI Величины alt 1 , модулированные в времени, на выходе логического блок 12 ВЫПОЛНЯЮТ роль управлякхаих возде ствий в контуре регулирования. Среднее значение Q определяет частоту вращения вала х вигателя. Ве личина введена для исключения не определенностей, появляющихся при перемножений S2 и составляющих пото косцепления рютора. Причем в устано вившемся режиме работы устройства, когда его свободное движение закончено, среднее значение /и. равно нулю. Иными словами, величины Я,/л создают такой вектор .управления движением устройства,, чтобы слежение за вектором тока статора осуществлялось во всех режимах работы реального двигателя. Составляющие тока ртатора % полученные в блоке 2 преобразования 1- токов, и составляющие I 5о6 5( численные :в блоке 11, сравниваются с помсидью элементов 7 и 8 сравнения. Результаты сравнения i оздействуют на релейные элементы 9 и Ю с выхода которых получак т импульсные сигналы, определягацие знак рассогласования. Указанные )импульсные сигналы распределяют в логическом блоке 12 на вы хйды, на которых сигналы S,/5 устанавливаются в зависимости от положения . вектора потокосцепления ротора на Л плоскости оС, /Э таким образом, чтобы знаки ошибок производных составлякхцих статора всегда были отрицательны, г,е, чтобы в каждом канал обратная с:вязь была бы отрицательной в любой момент времени. Алгоритм распределения сигналов определяют, исходя из того, что сигналы управления ,дс изменяются с частотой много большей, чем напряжв ние и ток асинхронного двигателя. Практически выбрав частоту переключений i, на уровне 50 кГц - 100 кГц, это условие можно выполнять для любо го современного регулируемого электропривода. Кроме этого, высокая частота перек.гпочений обеспечивает малое свободное время движения системы. Производные ошибок по времени можно представить в виде IZsc ... „. cJi сК dt Ы cj . Сл 6UU P drjgg m ,. dt oH; Ш где С И D - члены уравнений с медлен- но меняющимися величинами. С учетом того, что )с080; р |ф|51пв и, заменив . . получим С е cos 0/U - Е sin 0ft; Sine/in-EcoseSZ
Поскольку система координат неподвижная, а вектор потокосцепления ротора вращается, то меняется и угол О, т.е. меняются и коэффициенты при сигналах управления Я , /и. , как по величине, так и по знаку. Для обеспеченияусловий скользящего режима (слежения) вьщеляют 4 |квадранта (фиг. 5) . В первом квад}ран тесо5в 81П0,. Поэтому для того, чтобы связи были отрицательными, управляищим сигналам присваивают значения (ni,5l--st . Во втором квадранте ,, поэтому/ -Siqjn./i3g , SZaSVqfH Л 3 . Рассуясдая аналогично, получают для третье %t Vp V- A oi V 4/b %L-4p ;5 p
V-Vp ei 4toC+4/i 4tt-Vfb V
.. л
Vot-Kt/S Vot-«fp
V-Vp. fs/ ЧЫ-Vfi W..
которые реализует логический распределитель 43 логического блока 12 с помощью стандартных логических элементов .
Замкнутая система регулирования составляющих вектора статора, реализованная в устройстве, позволяет обеспечить высокую точность определения таких координат асинхронного двигателя как скорость вращения S и .составляющие вектора потокосцещ(ения ротора V,.
Таким образом, введение в устройство для определения координат асинхго кеадранта;и.81({пда,./,, для четвертого (л.,.
Квадранты вьщеляют по определенным знакам разности и суммы составля ю1цих вектора потокосцепления ротора. Обозначив через
.n()i
)
Л7, 5о.; 5л.,Э
управлянхцие воздействия 62,/и, формируют по следующим логическим функци,ям:
ронного двигателя блока вычисления составляющих вектора тока статора, элементов сравнения, релейных элементов и логического блока, с помощью которых образуется замкнутый контур регулирования составляющих вектора тока статора, позволяет обеспечить определение скорости вращения и составляющих потокосцепления ротора, не обходимых в системе регулирования асинхронным электроприводом, с более высокой точностью по сравнению с известным устройством, . 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1241399A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АСИНХРОННОГО ДВИГАТЕЛЯ, Б РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ, содержащее датчики фазных токов статора, подключенные к блоку преобразования; токов, два выхода которого соединены с первыми двумя входами блока вычисления составляющих вектора потокосцепления ротора,и датчики фазных напря-, женин статора, подключенные к блоку преобразования напряжений, о т л и- :л а ю щ е е с я тем, что, с целью по- вышения точности в статических и диг намических режимах работы, введены два элемента сравнения, два релейных ; - элемента, блок вычисления составляющих вектора тока статора и логичесjкий блок, первый вход которого через Ч. ;последовательно соединенные первый : реле1йный элемент и первый элемент .. . сравнения подключен к одному из выходов блока преобразования токов, второй вход через последовательно соединённые второй релейный элемент и второй элемент сравнения - к другому выходу блока преобразования токов, третий и четвертый входы соединены с выходами блока вычисления составляющих вектора потокосцепления ротрра, а выходы логического блока подключены к дополнительным входам блока вычисления составляющих вектора потокосцепления ротора и к первой паре бходов блока вычисления составляющих вектора тока статора, вторая пара входов которого подключена к выходам блока вычисления составляющих вектора потокосцепления ротора, третья пара входов - к выходам блока преобразования напряжений, а каждый из выходов - к второму входу соответствую- щего элемента сравнения 2, Устройство по п. 1, ® т л и чающееся тем, что логический блок содержит два релейных элемента, дв,а сумматора и распределитель им:пульсных сигналов, первый и.второй ОР входы которого образуют соответственсо но первый и второй входы логического блока, третий вход подключен через первый релейный элемент к выходу первого сумматора, четвертый вход через .второй релейный элемент - к вьЬсоду .второго сумматора, при этом первые и вторые входы сумматоров попарно объединены и образуют соответственно третий и четвертый входы логического блока, выходы Которого являются-выходами распределителя импульсных сигналов . . .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бродовский В.Н | |||
| и др | |||
| Асинх- | |||
| ронные приводы с честотнотоковым управлением | |||
| Известия АН СССР, Энергетика и транспорт , 1974, 2 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ очистки жидких нефтепродуктов | 1974 |
|
SU472146A1 |
