2
«м


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |


Изобретение относится к электротехнике. Целью изобретения является повышение точности определения координат асинхронного двигателя в статических и динамических режимах работы. Указанная цель достигается тем, что формирователь 12 управляющих воздействий дополнительно соединен с выходами блока 3 преобразования токов старора и изменена структура блока 6 вычисления составляющих вектора по- токосцепления и блока 11 вычисления вектора тока статора. В результате из структуры блоков 6 и 11 исключены масштабные элементы с коэффициентами, определяемыми параметрами роторной обмотки, которые существенно зависят от теплового режима асинхронного двигателя 1. Это обусловило повьпиение точности в определении таких координат как частота вращения и проекции вектора потокосцепления(д , Кп, в условиях изменения температур. 4 ил. о S (Л
/м
с
ТТЛ
tt
Q
Г
СО со
ю
со
и
f
jiZE Фа&1
Изобретение относится к электротехнике, а именно к устройствам для определения координат асинхронного двигателя, и может быть использовано в регулируемом асинхронном электро-. приводе общепромышленного назначения.
Цель изобретения - повышение точности определения координат асинхронного двигателя в статических и динамических режимах работы.
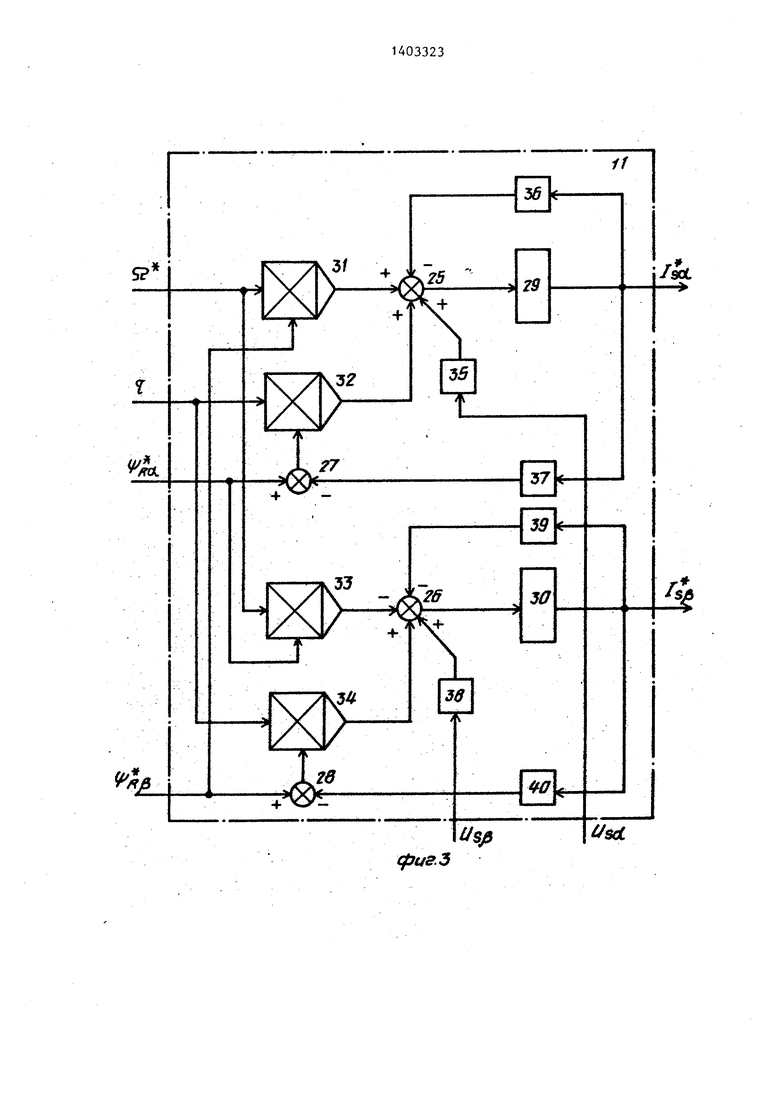
На фиг.1 представлена структурная схема устройства для определения координат асинхронного двигателя регу- лируемого электропривода} на фиг.2 - структурная схема блока вычисления составляющих вектора потокосцепления ротора; на фиг.З - структурная схема блока вычисления, составляющих тока статора; фиг.4 - структурная схема формирователя управляющих воздействий в контурах регулирования составляющих векторов потокосцепления ротора и тока статора.
Устройство для определения координат асинхронного двигателя 1 (фиг.1) содержит датчики 2 фазных токов статора, подключенные выходами к входам блока преобразования токов 3, датчики 4 фазных напряжений статора, подключенные выходами к входам блока преоб- разованш напряжений 5, блок 6 вычисления составляющих вектора потоко- сдепления ротора, снабженный двумя парами входов, два элемента сравнения 7 и 8, два релейных элемента 9 и 10, .блок 11 вычисления составляющих вектора тока статора, снабженный тремя парами входов,- формирователь 12 уп- равлякмдих воздействий в контурах регулирования составляющих векторов потокосцепления ротора и тока статора, снабженный тремя парами входов.
Первая пара входов блока 6 вычис- ления составляющих вектора потоко- сцетшения ротора объединена пофазно с первыми входами элементов сравнения 7 и 8 и подключена к выходам блока 3 преобразования токов статора. Вторая пара входов блока 6 вычисления составляющих вектора потокосцепления ротора объединена пофазно с первой парой входов блока 11 вычисления сосг тавляющих вектора тока статора и подключена соответственно к выходам формирователя управляющих воздействий 12. Вторая пара входов блока 11 вычисления составляющих вектора тока
статора подключена к выходам блока 6 вычисления составляющих- вектора потокосцепления ротора, третья пара входов блока 11 подключена к выходам блока 5 преобразования напряжений статора, а выходы блока 11 подключены ко вторым входам соответствующих элементов сравнения 7 и 8, выходы которых подключены ко входам- релейных элементов 9 и 10, выходы которых подключены к первой паре входов формирователя 12, вторая пара входов которое го подключена к выходам блока 6 вычисления составляющих вектора потокосцепления ротора. Третья пара входов формирователя 12 управляющих воздействий подключена к выходам блока 3 преобразования токов статора.
Блок 6 вычисления составляющих вектора потокосцепления ротора выполнен с сумматорами 13 - 16 (фиг.2) двумя интеграторами 17 и 18, масштабными элементами 19 и 20,блоками умножения 21 - 24, причем входы масштабных элементов 19 и 20 образуют первую пару входов блока 6, первые входы блоков умножения 21, 23 и 22, 24 попарно объединены и образуют вторую пару входов блока 6 вычисления составляющих вектора потокосцепления ротора, выходы блоков умножения 21 и 23 подключены к первым входам сумматоров 13 и 15, выходы блоков умножения 22 и 24 подключены ко вторым входам сумматоров 13 и 15, выходы которых подключены ко входам интеграторов 17 и 18, выходы которых образуют первый и второй выходы блока 6 вычисления составляющих вектора потокосцепления ротора, выход интегратора 17 подключен к объединенньп первому входу сумматора 14 и второму входу блока умножения 23, выход интегратора 18 подключен к объединенным первому входу сумматора 16 и второму входу блока умножения 21, выходы масштабных элементов 19 и 20 подключены ко вторым входам сумматоров 14 и 16, выходы которых подключены ко вторым входам блоков умножения 22 и 24.
Блок 11 вычисления составляющих вектора тока статора выполнен с сумматорами 25 - 28 (фиг. 3)jинтеграторами 29. и 30, блоками умножения 31 - 34, масштабными элементами 35 - 40, причем первые входы блоков умножения 31, 33 и 32, 34 объединены попарно и образуют первую пару входов блока 11,
31403323
вторые входы блоков умножения 33 и 31 вующих датчиков 2 и А; в составляющие
объединены попарно с первыми входами сумматоров 27 и 28 и образуют вторую пару входов блока 1,1 j третья пара входов блока 11 подключена ко входам масштабных элементов 35 и 38, выходы которых подключены соответственно к первым входам сумматоров 25 и 26,
выходы блоков умножения 31 и 32 под- ю ром задающей величиной является векклочен ы ко второму и третьему входам сумматора 25, выходы блоков умножения 33 и 34 подключены ко второму и i . третьему входам сумматора 26, выходы масштабных элементов 36 и 39 подключены к четвертым входам сумматоров 25 и 26, выходы которых подключены ко входам интеграторов 29 и 30, выходы которых подключены к объединенным попарно входам масштабных элемен- 20
тор тока статора, представленньй в виде проекций на оси координат i, /5 .
Проекции вычисленного вектора ток статора Igjt sa Формируются в блоке 15 11, реализующем следующие дифференци альные уравнения
,
II 55L (dt .-цч-L
ным попарно входам масштабных элемен-20 ± :г о т т 1 тов 36, 37 и 39, 40 и образуют выходы %
блока 11, выходы масштабных элементов 37 и 40 подключены ко вторым вхо- тг г-г--г-Г U dt 5/S
dl,
Ья
дам сумматоров 27 и 28, выходы которых подключены ко вторым входам блоков умножения 32 и 34.
Формирователь 12 управляющих воздействий выполнен с сумматорами 41 - 44, релейными элементами 45, 46, Айсштабными элементами 47, 48, распределителем импульсных сигналов 49, причем первая пара входов распределителя импульсньпс сигналов 49 образует первую пару входов формирователя 12, а выходы распределителя 49 образуют выходы формирователя 12, Первые и вторые входы сумматоров 41 и 42 объединены попарно и образуют вторую пару входов формирователя 12, выходы сумматоров 41 и 42 подключены ко входам релейных элементов 45 и 46, выходы которых подключены ко второй паре вхо- дов распределителя импульсных сигналов 49, первые и вторые входы сумма- торов 43 и 44 объединены попарно и образуют третью пару входов формирователя 12, выходы сумматоров 43 и 44 подключены ко входам масштабных элементов 47 и 48, выходы которых подключены к третьим входам сумматоров 41 и 42.
Устройство для определения координат асинхронного двигателя в регулируемом электроприводе работает следующим образом.
Блок преобразования токов 3 и блок преобразования напряжений 5 осуществляют преобразование фазных токов и напряжений, поступающих с соответст Rslii, Ць,-ьг
р
25
30
-L r - « «V V -E;L; Li
где R5,L5,L, параметры асинхрон ного двигателя; Л. - вычислительное зна чение скорости дви гателя ;
- фиктивная переменная.
Проекции вычисленного вектора по- 3g токосцепления ротора ,((„ формируются в блоке 6, реализующем следующие дифференциальные уравнения (ji, dt
40
dVJ -( -L I як - TReL
45
Составляющие вектора тока статора I5, полученные на выходе блока преобразования токов 3, и составляющие
Sui-
, сформированные на вьпсо де блока 11, сравниваются с помощью элементов сравнения 7 и 8. Результат сравнения воздействуют на релейные
50 элементы 9 и 10, с выхода которых получают импульсные сигналы, определяющие знак рассогласования. Указанные импульсные сигналы распределяют в формирователе 12 на выходы, на ко-
55 торых сигналы Я, С устанавливаются в зависимости от положения векторов потокосцепления ротора (.(, VR ) и тока статора (Igj, ISA плоскос ти mi, |3 таким образом, чтобы знаки
.обобщенных векторов тока 1, и напряжения .-Ugo статора в декартовой системе координат ei , ft , неподвижной относительно статора асинх- .ронного двигателя 1.
XI Устройство представляет собой замкнутый контур регулирования, в кото
тор тока статора, представленньй в виде проекций на оси координат i, /5 .
Проекции вычисленного вектора тока статора Igjt sa Формируются в блоке 11, реализующем следующие дифференциальные уравнения
,
II 55L (dt .-цч-L
тг г-г--г-Г U dt 5/S
dl,
Ья
25
30
-L r - « «V V -E;L; Li:;.
где R5,L5,L, параметры асинхронного двигателя; Л. - вычислительное значение скорости двигателя ;
- фиктивная переменная.
Проекции вычисленного вектора по- 3g токосцепления ротора ,((„ формируются в блоке 6, реализующем следующие дифференциальные уравнения (ji, dt
40
dVJ -( -L I як - TReL
5
Составляющие вектора тока статора I5, полученные на выходе блока преобразования токов 3, и составляющие
Sui-
, сформированные на вьпсо- де блока 11, сравниваются с помощью элементов сравнения 7 и 8. Результаты сравнения воздействуют на релейные
0 элементы 9 и 10, с выхода которых получают импульсные сигналы, определяющие знак рассогласования. Указанные импульсные сигналы распределяют в формирователе 12 на выходы, на ко-
5 торых сигналы Я, С устанавливаются в зависимости от положения векторов потокосцепления ротора (.(, VR ) и тока статора (Igj, ISA плоскости mi, |3 таким образом, чтобы знаки
1А03323
производных составляющих вектора тока статора всегда были отрицательны, т.е. чтобы в каждом канале обратная связь была отрицательной в любой момент времени.
Алгоритм распределения сигналов определяют, исходя из того, что сигналы, а изменяются с частотой s,t|i8s,,& s,.,& s,,& s,,,& §,.,& s.jj, s,&
il(i W b1
лы (+1 H& ui(b w и uw (+)SH
itp, (4-) t-)
t Silci, sig l5o6- s.. Sul,
: S)sign((,, , S,sign( ЙА/
Й A 2,(.), ((,)), Величины П- , i , модулированные фо времени, на выходе формирователя 1.2 выполняют роль управляющих воздей- йтвий в контуре регулирования.
Среднее значение я определяет фкорость вращения вала асинхронного Двигателя 1. В установившемся режиме работы.устройства, когда его свобод- йое движение закончено, среднее зна- ение С определяется,как Гер . Величины Q.% создают такой век- fop управления движением устройства, чтобы слежение за вектором тока Статора осуществлялось во всех режимах работы электропривода. .
Замкнутая система регулирования сЬставляюиуях вектора тока статора, {)еализованная в устройстве, позволяет (Эбеспёчить высокую точность определе- Ьия таких координат асинхронного двигателя, как скорость и проекции тора потокосцеплени я ротора у, ,«f яр в условиях изменения температуры двигателя при эксплуатации электропривода, за счет исключения в блоках вычисления составляющих векторов тока статора и потокосцепления ротора масштабных элементов с коэффициентами, определяемыми параметрами роторной обмотки, которые существенно за- йисят от теплового режима двигателя. Таким образом, подключение дополнительной пары входов формирователя управляющих воздействий к выходам блока преобразования токов статора и
го больше, чем напряжение и ток асинхронного двигателя в регулируемом электроприводе. Кроме того, высокая частота переключений обеспечивает малое свободное движение системы.
Сигналы , Я формируют по следующим логическим функциям
5
введение в его состав дополнительно Q двух сумматоров, двух масштабных элементов, введение в блок вычисления составляющих вектора потокосцепления ротора дополнительно двух интеграторов, а вычисления составляющих 5 вектора тока статора - двух интеграторов, двух сумматоров и двух масштабных элементов обеспечивает определение координат в статических и динамических режимах с более высокой точ- 0 ностью в сравнении с известньм решением.
Формула изобретения
Устройство для определения координат асинхронного двигателя регулируемого электропривода, содержащее датчики фазных токов статора, подключенные выходами к входам блока преобразова-. ния токов статора, датчики фазных над пряжений статора, подключенные выходами к входам блока преобразования напряжений, два элемента сравнения, два релейных элемента, формирователь управляющих воздействий в контурах
45 регулирования составляющих векторов потокосцепления ротора и тока статора с двумя парами входов, блок вычисления составляющих вектора тока статора с тремя парами входов, блок вычисления составляющих вектора потокосцеп-. ления ротора с двумя парами входов, первая из которых объединена пофазно с первыми входами соответствующих элементов сравнения и подключена к выходам блока преобразования токов, а вторая пара входов объединена пофазно с первой парой входов блока вычисления составляющих вектора тока статора и подключена к соответствую50
71
щим выходам указанного формирователя управляющих воздействий, вторая пар входов блока вычисления составляющих вектора тока статора подключена к выходам блока вычисления составляющих вектора потокосцепления ротора, его третья пара входов подключена к выходам блока преобразования напряжений статора, а выходы подключены к вторым входам соответствующих элементов сравнения, выходы которых подключены к входам соответствующих релейных элементов, выходы которых подключены к первой паре входов указанного формирователя управляющих воздействий, вторая пара входов которого подключена к выходам блока вычисления составляющих вектора потокоецепления ротора, выполненного с четырьмя блоками умножения, четырьмя сумматорами и двумя масщтабными элементами, при- чем входы масштабных элементов образуют первую пару входов названного блока, первый вход второй пары входов названного блока подключен к объединенным первым входам первого и второго блоков умножения, второй вход - к объединенным первым входам третьего и четвертого блоков умножения,второй вход первого блока умножения подключен к второму входу блока вычисления составляющих вектора потокосцепления ротора, второй вход втор-ого блока умножения подключен к первому входу блока вычисления составляющих вектора потокосцепления ротора, выходы первого и второго блоков умножения подключены соответственно к первым входам первой пары сумматоров, выходы масштабных элементов подключены соответственно к первым входам второй пары сумматоров, блок вычисления составляющих вектора тока статора выполнен с-четырьмя блоками умножения, .двумя сумматорами, четьфьмя масштабными элементами, причем первый вход первой пары входов названного блока подключен к объединенным первым входам первого и второго блоков умножения, а второй вход - к объединенным первым входам третьего и четвертого блоков умножения, первый вход второй пары входов подключен к объединенным вторым входам второго и третьего блоков умножения, а второй вход - к объединенным вторым входам первого и четвертого блоков умножения, выходы первого и второго блоков умножения под23. 8
ключены соответственно к первьтм входам сумматоров, а выходы третьего и четвертого блоков, умножения - к
вторым входам сумматоров, третьи и четвертые входы которых подключены соответственно к выходам первой и второй пар масщтабных элементов,входы первой пары масштабных элементов образуют третью пару входов названного блока, формирователь управляющих воздействий в контурах регулирования составляющих векторов потокосцепления ротора и тока статора выполнен с двумя рб лейными элементами, двумя сумматорами и распределителем импульсных сигналов, первая пара входов которого образует первую пару входов названного формирователя управляющих воздейстВИЙ, вторая пара входов распределителя импульсных сигналов подключена через соответствующие релейные элементы к выходам первого и второго сумматоров, первые и вторые входы которых
соответственно объединены и образуют вторую пару входов названного форми- рователя управляющих воздействий, выходы которого образованы выходами распределителя импульсных сигналов,
отличающееся тем, что, с целью повышения точности определения координат асинхронного двигателя в статических и динамических режимах, формирователь управляющих воздействий
в -контурах регулирования составляющих векторов потокосцепления ротора и тока статора дополнительно снабжен двумя входами, двумя сумматорами и двумя масштабньа й элементами, причем
масштабные элементы включены между дополнительными входами первого и второго сумматоров и выходами дополнительных сумматоров соответственно, первые и вторые входы которых попарно
объединены и образуют дополнительную пару входов названного формирователя управляющих воздействий, которая подключена к выходам блока преобразова-.. НИЛ токов статора, в блок вычисления
составляющих вектора потокосцепления ротОра дополнительно введены два интегратора, входы которых подключены к выходам первой пары сумматоров, а выходы интеграторов образуют вьгходы
названного блока, которые подключены вторым входам второй пары сумматоов, выходы которых подключены к втоым входам третьего и четвертого блоов умножения, выходы которых подклю9U
чены к вторым входам первой пары сумматоров, в блок вычисления составляю- 1ЦИХ вектора тока статора дополнительно введены два интегратора, два сумматора, два масштабных элемента, входы которых соответственно объединены с входами второй пары масштабных элементов и выходами интеграторов и образуют выходы названного блока, входы интеграторов подключены к выхо
срие.г
23
дам первой пары сумматоров, выходы дополнительной пары масштабных элементов подключены к первым входам дополнительной пары сумматоров, вторые пары входов которых образуют соответственно вторую пару входов названного блока, а выходы дополнительной пары сумматоров подключены соответственно к вторым входам третьего четвертого блоков умножения.
(.З
сриеЛ
| Способ очистки жидких нефтепродуктов | 1974 |
|
SU472146A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
