со со со эо
70
SD
Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения.
Целью изобретения является упрощение и повышение точности определения координат асинхронного двигателя.
На фиг.1 изображена структурная схема устройства для определения координат асинхронного двигателя в регулируемом электроприводе;на фиг, 2 - структурная схема блока вычисления составляющих вектора потокосцепления ротора; на фиг.З - структурная схема блока вычисления составляющих вектора тока статора.
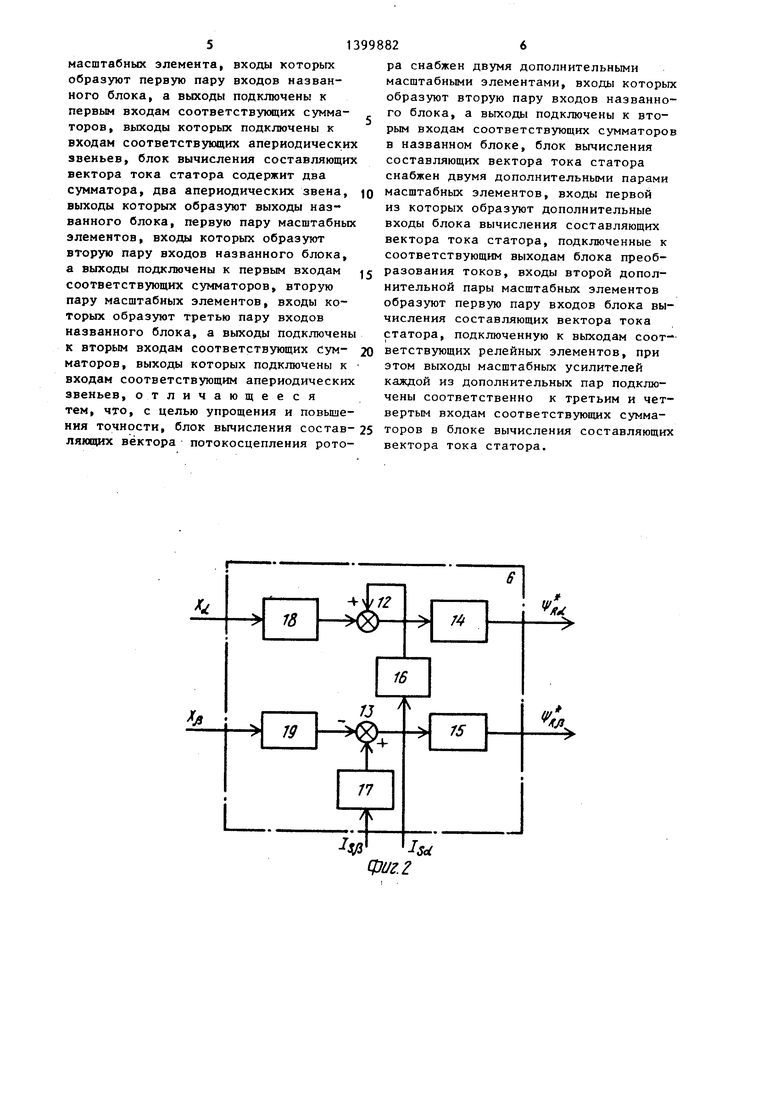
Устройство для определения координат асинхронного двигателя 1 (фиг.1) содержит датчики 2 фазных токов статора, подключенные выходами к входам блока 3 преобразования токов, датчики 4 фазных напряжений статора, подключенные выходами к входам блока 5 преобразования напряжений, блок 6 вычис- 25 27,29,31 подключены к входам сумматоров 20,и 21 соответственно.
ления составляющих вектора потокосцепления ротора, снабженный двумя парами входов, два элемента 7 и 8 сравнения, два релейных элемента 9 и 10, блок 11 вычисления составляющих вектора тока статора, снабженный четырьмя парами входов.
Первая пара входов блока 6 вычисления составляющих вектора потокосцепления объединена пофазно с первыми входами элементов 7 и 8 сравнения и подключена к выходам блока 3 преобразования токов статора. Вторая пара входов блока 6 вычисления составляющих вектора потокосцепления ротора объе- динена пофазно с первой паров входов блока 11 вычисления составляющих вектора тока статора и подключена к выходам релейных элементов 9 и 10. Вы
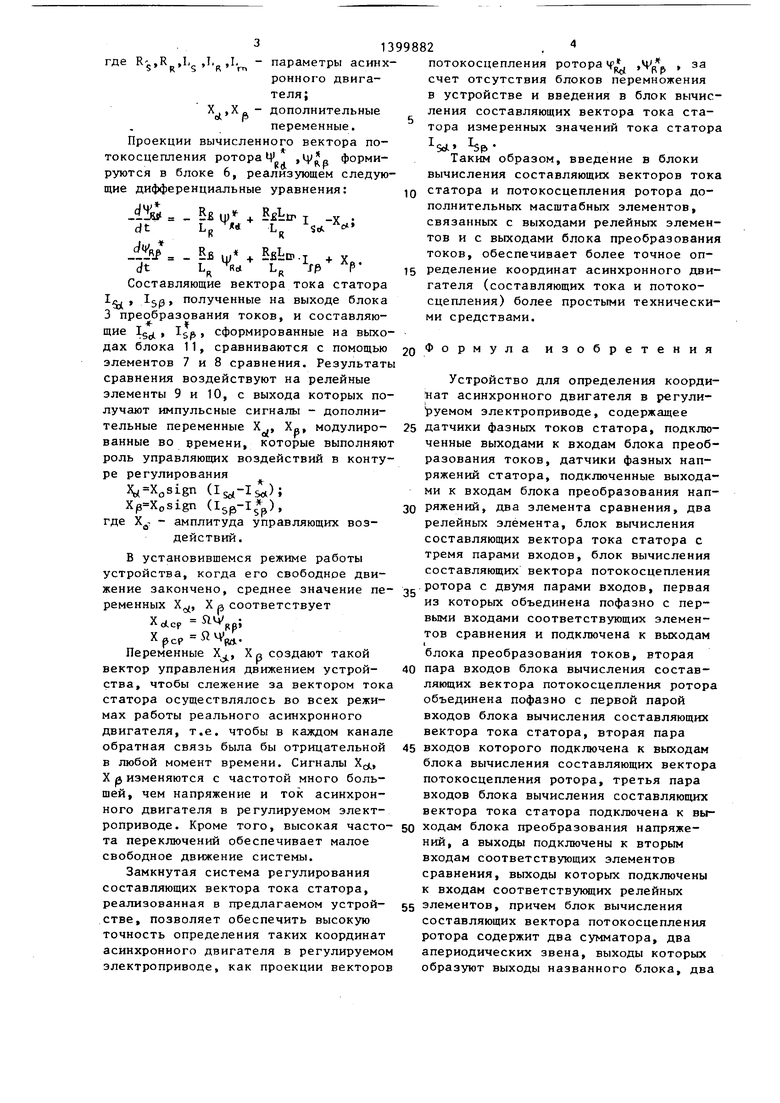
15, выходы которых образуют выходы названного блока, двумя парами масштабных элементов 16, 17 и 18, 19, входы которых образуют первую и вторую пару входов блока, а выходы подключены к первым и вторым входам сумматоров 12 и 13 соответственно, выходы сумматоров 12 и 13 подключены
к входам апериодических звеньев 14 и 15 соответственно.
Блок 11 вычисления составляющих вектора тока статора (фиг.З) снабжен двумя сумматорами 20 и 21, двумя апериодическими звеньями 22 и 23, выходы которых образуют выходы первичного блока, а входы подключены к выходам сумматоров 20 и 21 соответственно, четырьмя парами масштабных элементов
24, 25, 26, 27, 28, 29, 30, 31, входы которых образуют соответственно первую, вторую, третью и четвертую пары входов названного блока, выходы масштабных элементов 24,26,28,30 и 25,
ров 20,и 21 соответственно.
Устройство для определения координат в асинхронном электроприводе работает следующим образом.
Блок 3 преобразования.токов и блок 5 преобразования напряжений осуществляют преобразование фазных токов и напряжений, поступающих с соответствующих датчиков 2 и 4, в составляющие обобщенных векторов тока IJHL напряжения Uj, Ugo статора в декартовой системе координат oL, , неподвижной относительно статора асинхронного двигателя 1.
Проекции вычисленного вектора стаJL.ы
тора 1.-, Ig формируются в блоке 11, реализующем следующие дифференциальные уравнения:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1987 |
|
SU1415398A1 |
| Электропривод | 1988 |
|
SU1552333A1 |
Изобретение относится к электротехнике. Целью изобретения является упрощение и повьппение точности определения координат асинхронного двигателя. Указанная цель достигается тем, что в устройстве изменена структура блока 6 вычисления составляющих вектора потокосцепления ротора и блока 11 вычисления составляющих вектора тока статора и организована дополнительная связь между блоком 11 и блоком 3 преобразования токов статора. В результате повышается точность определения таких координат асинхронного двигателя 1, как проекции векторов ы потокосцепления ротора и Ц цо , так как исключаются блоки перемножения и вводятся в блок 11 измеренные значения тока статора и Ijp Зил, $ (Л
ходы блока 6 подключены к второй паре ,е JT
- jT п 5s.LlE
dt
входов блока 11, третья пара входов которого подключена к выходам блока 5 преобразования напряжений статора, а четвертая пара входов - к выходам блока 3 преобразования токов статора. Выходы блока 11 вычисления составляю- щих вектора тока статора подключены к вторым входам элементов 7 и 8 сравнения, выходы которых подключены к входам релейных элементов 9 и 10. Блок 6 вычисления составляющих вектора потокосцепления ротора (фиг.2) снабжен двумя с мматорами 12 и 13, двумя апериодическими звеньями 14 и
1Г7
ЧЦ-ьл
ц.5ь1;Е ы
L«(44-L
ч(ц
55
iitn.V
ЦЦ-ЬД Р
5s.LlE
1Г7
ЧЦ-ьл
fiLijT
ч(ць,-ь;)
sp
iitn.V
ЦЦ-ЬД Р
где
Rs. 4 4 i-r.1399882.
параметры асинх- потокосцепления ротора Va за
ЧЛ п Р
ронного двига- счет отсутствия блоков перемножения
теля;
Х..Х,.- дополнительные р
переменные.
Проекции вычисленного вектора потокосцепления ротора Ц Форми., , Kd г
руются в блоке 6, реализующем следующие дифференциальные уравнения:
ut + X
R
ил
IV -н Rrf
R SfittP
S
ТЭ
ci
Составляющие вектора тока статора I , 150 полученные на выходе блока 3 преобразования токов, и составляющие 1 , ISP, сформированные на выходах блока 11, сравниваются с помощью элементов 7 и 8 сравнения. Результаты сравнения воздействуют на релейные элементы 9 и 10, с выхода которых получают импульсные сигналы - дополнительные переменные X ., Хд, модулированные во времени, которые выполняют роль управляющих воздействий в контуре регулирования
Xj XoSLgn ();
Xp Xosign (), где Хд- - амплитуда управляющих воздействий.
В установившемся режиме работы устройства, когда его свободное движение закончено, среднее значение переменных Х, X А соответствует
XdLcp pp;
X вер рЛ
X
Хр создают такой
Переменные ,
вектор управления движением устройства, чтобы слежение за вектором тока статора осуществлялось во всех режимах работы реального асинхронного двигателя, т.е. чтобы в каждом канале обратная связь была бы отрицательной в любой момент времени. Сигналы ., X А изменяются с частотой много боль- щей, чем напряжение и ток асинхронного двигателя в регулируемом электроприводе. Кроме того, высокая часто- 50 ходам блока преобразования напряжета переключений обеспечивает малое свободное движение системы.
Замкнутая система регулирования составляющих вектора тока статора, реализованная в предлагаемом устройстве, позволяет обеспечить высокую точность определения таких координат асинхронного двигателя в регулируемом электроприводе, как проекции векторов
в устройстве и введения в блок вычисления составляющих вектора тока статора измеренных значений тока статора
SdL %Э
Таким образом, введение в блоки
вычисления составляющих векторов тока статора и потокосцепления ротора дополнительных масштабных элементов, связанньпс с выходами релейных элементов и с выходами блока преобразования токов, обеспечивает более точное оп- ределение координат асинхронного двигателя (составляющих тока и потокосцепления) более простыми техническими средствами.
Формула изобретения
Устройство для определения координат асинхронного двигателя в регули- руемом электроприводе, содержащее
датчики фазных токов статора, подключенные выходами к входам блока преобразования токов, датчики фазных напряжений статора, подключенные выходами к входам блока преобразования напряжений, два элемента сравнения, два релейных элемента, блок вычисления составляющих вектора тока статора с тремя парами входов, блок вычисления составляющих вектора потокосцепления ротора с двумя парами входов, первая из которых объединена пофазно с первыми входами соответствующих элементов сравнения и подключена к выходам
I
блока преобразования токов, вторая пара входов блока вычисления составляющих вектора потокосцепления ротора объединена пофазно с первой парой входов блока вычисления составляющих вектора тока статора, вторая пара входов которого подключена к выходам блока вычисления составляющих вектора потокосцепления ротора, третья пара входов блока вычисления составляющих вектора тока статора подключена к вы
НИИ, а выходы подключены к вторым входам соответствующих элементов сравнения, выходы которых подключены к входам соответствукнцих релейных 55 элементов, причем блок вычисления составляющих вектора потокосцепления ротора содержит два сумматора, два апериодических звена, выходы которых образуют выходы названного блока, два
масштабных элемента, входы которых образуют первую пару входов названного блока, а выходы подключены к первым входам соответствующих сумматоров, выходы которых подключены к входам соответствующих апериодических звеньев, блок вычисления составляющих вектора тока статора содержит два сумматора, два апериодических звена, выходы которых образуют выходы названного блока, первую пару масштабных элементов, входы которых образуют вторую пару входов названного блока, а выходы подключены к первым входам соответствующих сумматоров, вторую пару масштабных элементов, входы которых образуют третью пару входов названного блока, а выходы подключены к вторым входам соответствующих Сум- маторов, выходы которых подключены к входам соответствующим апериодических звеньев, отличающееся тем, что, с целью упрощения и повышения точности, блок вычисления состав- лямщих вектора потокосцепления рото10
20 2598826
ра снабжен двумя дополнительными масштабными элементами, входы которых образуют вторую пару входов названного блока, а выходы подключены к вторым входам соответствующих сумматоров в названном блоке, блок вычисления составляющих вектора тока статора снабжен двумя дополнительными парами масштабных элементов, входы первой из которых образуют дополнительные входы блока вычисления составляющих вектора тока статора, подключенные к соответствующим выходам блока преобразования токов, входы второй дополнительной пары масштабных элементов образуют первую пару входов блока вычисления составляющих вектора тока статора, подключенную к выходам соот- ветствующих релейных элементов, при этом выходы масштабных усилителей каждой из дополнительных пар подключены соответственно к третьим и четвертым входам соответствующих сумматоров в блоке вычисления составляющих вектора тока статора.
фиг. 2
23
II
2S
u
фцг.з
| Способ очистки жидких нефтепродуктов | 1974 |
|
SU472146A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
