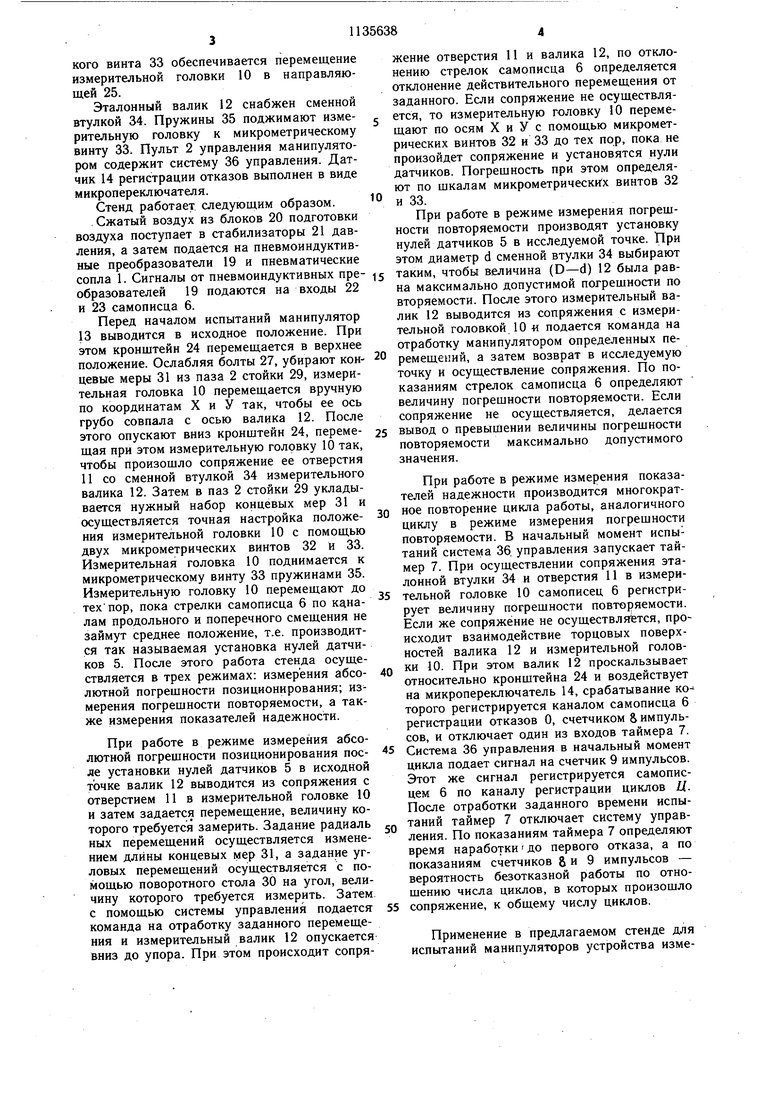
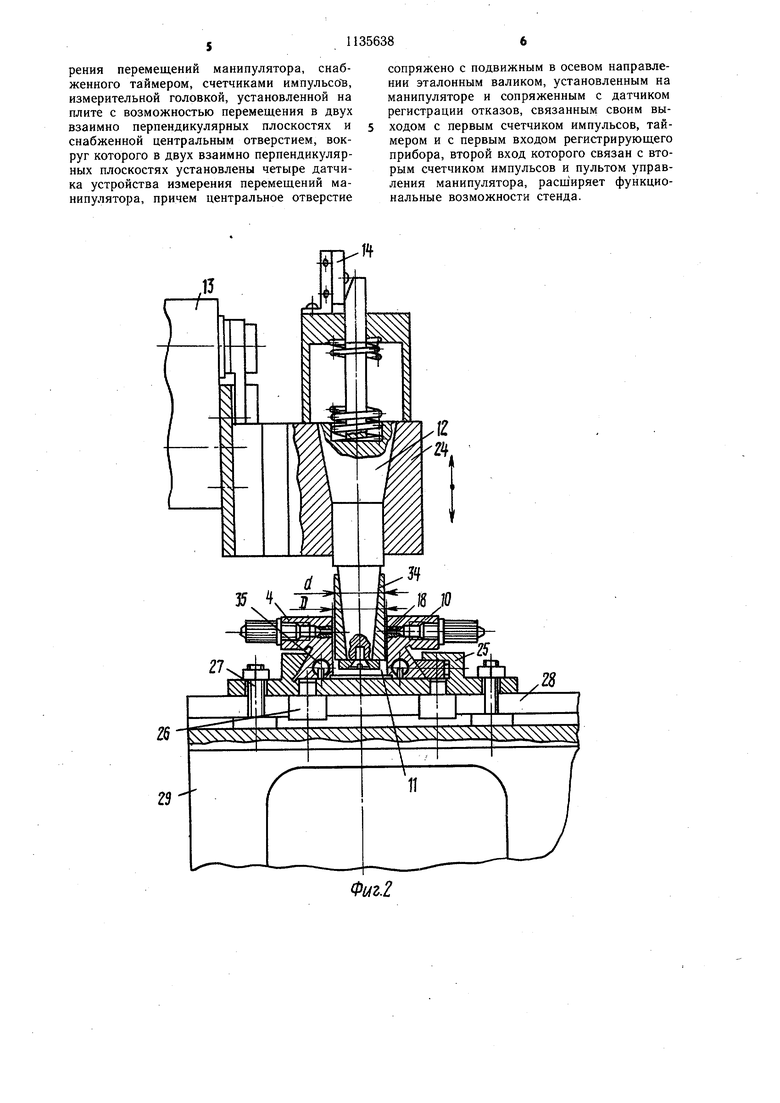
Изобретение относится к роботостроению, в частности к стендам для оценки качества манипуляторных систем, и может быть использовано для проведения исследовательских приемно-сдаточных и других испыта-, НИИ промышленных роботов. Известны стенды для оценки качества манипуляторных систем, выполненные в виде пульта управления, регистрирующей аппаратуры, устройство задания траектории перемещения захвата манипулятора, перемещающегося в пространстве посредством приводного устройства, металлического стержня с закрепленными на нем двумя параллельными пластинами, между которыми расположено металлическое кольцо, установленное в захвате манипулятора и связанное с входами регистрирующей аппаратуры, а стержень связан с выходом источника постояиного тока 1 . Однако такое устройство не позволяет определять точность позиционирования в конкретных точках траектории (на точность измерения влияют погрешности устройства задания траектории; стенд характеризуется сложностью осуществления автоматизации процесса испытаний). Известен также стенд для испытаний манипуляторов, содерж ащий плиту, установленные на не.й пульт управления манипулято ром, устройство задания перемещений манипулятора и устройство измерения перемещеНИИ манипулятора, включающее датчики, связанные через преобразователи с регистрирующим прибором 2. Недостатком известного устройства является невозможность опред,еления абсолютной погрешности перемещений манипулятора, что снижает функциональные возможности стенда. Цель изобретения - расщирение функциональных возможностей стенда. Указанная цель достигается тем, что в . стенде для испытаний манипуляторов, содержащем плиту, установленные на ней пульт управления манипулятором, устройство для задания перемещений манипулятора и устройство измерения перемещений манипулятора, включающее датчики, связанные через преобразователи с регистрирующим прибором, устройство измерения перемещений манипулятора снабжено таймером, счетчиками импульсов, измерительной головкой, установленной на плите с возможностью перемещения в двух взаимно перпендикулярных плоскостях и снабженной центральным отверстием, вокруг которого в двух взаимно перпендикулярных плоскостях установлены четыре датчика устройства измерения Перемещений манипулятора, центральное отверстие сопряжено с подвижным в осевом направлении эталонным валиком, установленным Иа манипуляторе и сопряженным с датчиком регистрации отказов, связанным своим выходом с первым счетчиком импульсов, таймером, и с первым входом регистрирующего прибора, второй вход которого связан с вторым счетчиком импульсов и пультом управления манипулятором. На фиг. 1 изображен стенд, общий вид; на фиг. 2 - измерительная головка и часть манипулятора, разрез; на фиг. 3 - блоксхема устройства измерения перемещений .манипулятора. Стенд для испытаний манипуляторов содержит плиту 1, установленные на ней пульт 2 управления манипулятором, устройство 3 для задания перемещений манипулятора, устройство 4 измерения перемещений манипулятора, включающее датчики 5, связанные через преобразователи (не показаны) с регистрирующим прибором (самописцем) 6. Устройство 4 измерения перемещений манипулятора снабжено таймером 7, счетчиками 8 и 9 импульсов, измерительной головкой 10, установленной на плите 1 с возможностью перемещения в двух взаимно перпендикулярных плоскостях и снабженной центральным отверстием И, вокруг которого в двух взаимно перпендикулярных плоскостях установлены четыре датчика 5 устройства измерения перемещений манипулятора. Центральное отверстие 11 сопряжено с подвижным в осевом направлении эталонным валиком 12, установленным на манипуляторе 13 и сопряженным с датчиком 14 регистрации отказов (микропереключателем), связанн гм своим выходом 15 с первым счетчиком 8 импульсов, таймерх м 7 и с первым входом 16 регистрирующего прибора 6, второй вход 17 которого связан с вторым счетчиком 9 импульсов и пультом 2 управления манипулятором. Датчики 5 выполнены в виде пневматических сопел 1, соединенных с пневмоиндуктивными преобразователями 19, блоками 20 подготовки воздуха и стабилизаторами 21 давления. В качестве регистрирующего прибора 6 применен многоканальный самописец с входами 16, 17, 22 и 23. Эталонный валик 12 установлен на манипуляторе .13 посредством кронштейна 24, который может перемещаться относительно манипулятора в вертикальной плоскости и фиксироваться на н. Измерительная головка 10 установлена на направляющей 25, которая с помощью пальцев 26 и болтов 27 установлена в пазу- 28 стойки 29 на плите 1. Устройство 3 для задания перемещений манипулятора состоит из поворотного стола 30, на котором установлен испытываемый манипулятор 13, и набора концевых мер 31, помещенных в паз 2 стойки 29 между направляющей 25 и микрометрическим винтом 32 на стойке 29. С помощью микрометрического винта 33 обеспечивается перемещение измерительной головки 10 в направляющей 25. Эталонный валик 12 снабжен сменной втулкой 34. Пружины 35 поджимают измерительную головку к микрометрическому винту 33; Пульт 2 управления манипулятором содержит систему 36 управления. Датчик 14 регистрации отказов выполнен в виде микропереключателя. Стенд работает следующим образом. Сжатый воздух из блоков 20 подготовки воздуха поступает в стабилизаторы 21 давления, а затем подается на пневмоиндуктивные преобразователи 19 и пневматические сопла 1. Сигналы от пневмоиндуктивных преобразователей 19 подаются на входы 22 и 23 самописца 6. Перед началом испытаний манипулятор 13 выводится в исходное положение. При этом кронштейн 24 перемещается в верхнее положение. Ослабляя болты 27, убирают концевые меры 31 из паза 2 стойки 29, измерительная головка 10 перемещается вручную по координатам X и У так, чтобы ее ось грубо совпала с осью валика 12. После этого опускают вниз кронщтейн 24, перемещая при этом измерительную головку 10 так, чтобы произощло сопряжение ее отверстия 11 со сменной втулкой 34 измерительного валика 12. Затем в паз 2 стойки 29 укладывается нужный набор концевых мер 31 и осуществляется точная настройка положения измерительной головки 10 с помощью двух микрометрических винтов 32 и 33. Измерительная головка 10 поднимается к микрометрическому винту 33 пружинами 35. Измерительную головку 10 перемещают до техпор, пока стрелки самописца 6 по к налам продольного и поперечного смещения не займут среднее положение, т.е. производится так называемая установка нулей датчиков 5. После этого работа стенда осуществляется в трех режимах: измерения абсолютной погрешности позиционирования; измерения погрешности повторяемости, а также измерения показателей надежности. При работе в режиме измерения абсолютной погрешности позиционирования после установки нулей датчиков 5 в исходной точке валик 12 выводится из сопряжения с отверстием 11 в измерительной головке 10 и затем задается перемещение, величину которого требуется замерить. Задание радиаль ных перемещений осуществляется изменением длины концевых мер 31, а задание угловых перемещений осуществляется с помощью поворотного стола 30 на угол, величину которого требуется измерить. Затем, с помощью системы управления подается команда на отработку заданного перемещения и измерительный валик 12 опускается вниз до упора. При этом происходит сопряжение отверстия 11 и валика 12, по отклонению стрелок самописца 6 определяется отклонение действительного перемещения от заданного. Если сопряжение не осуществляется, то измерительную головку 10 перемещают по осям X и У с помощью микрометрических винтов 32 и 33 до тех пор, пока не произойдет сопряжение и установятся нули датчиков. Погрешность при этом определяют по шкалам микрометрических винтов 32 и 33. При работе в режиме измерения погрешности повторяемости производят установку нулей датчиков 5 в исследуемой точке. При этом диаметр d сменной втулки 34 выбирают таким, чтобы величина (D-d) 12 была равна максимально допустимой погрешности по вторяемости. После этого измерительный валик 12 выводится из сопряжения с измерительной головкой 10 « подается команда на отработку манипулятором определенных перемещений, а затем возврат в исследуемую точку и осуществление сопряжения. По показаниям стрелок самописца 6 определяют величину погрешности повторяемости. Если сопряжение не осуществляется, делается вывод о превышении величины погрешности повторяемости максимально допустимого значения. При работе в режиме измерения показателей надежности производится многократное повторение цикла работы, аналогичного циклу в режиме измерения погрешности повторяемости. В начальный момент испытаний система 36. управления запускает таймер 7. При осуществлении сопряжения эталонной втулки 34 и отверстия 11 в измерительной головке 10 самописец 6 регистрирует величину погрешности повторяемости. Если же сопряжение не осуществляется, происходит взаимодействие торцовых поверхностей валика 12 и измерительной головки 10. При этом валик 12 проскальзывает относительно кронщтейна 24 и воздействует на микропереключатель 14, срабатывание которого регистрируется каналом самописца 6 регистрации отказов О, счетчиком & импульсов, и отключает один из входов таймера 7. Система 36 управления в начальный момент цикла подает сигнал на счетчик 9 импульсов. Этот же сигнал регистрируется самописцем 6 по каналу регистрации циклов Ц. После отработки заданного времени испытаний таймер 7 отключает систему управления. По показаниям таймера 7 определяют время наработки до первого отказа, а по показаниям счетчиков & и 9 импульсов - вероятность безотказной работы по отношению числа циклов, в которых произошло сопряжение, к общему числу циклов. Применение в предлагаемом стенде для испытаний манипуляторов устройства измерения перемещений манипулятора, снабженного таймером, счетчиками импульсотв, измерительной головкой, установленной на плите с возможностью перемещения в двух взаимно перпендикулярных плоскостях и снабженной центральным отверстием, вокруг которого в двух взаимно перпендикулярных плоскостях установлены четыре датчика устройства измерения перемещений манипулятора, причем центральное отверстие
сопряжено с подвижным в осевом направлении эталонным валиком, установленным на манипуляторе и сопряженным с датчиком регистрации отказов, связанным своим выходом с первым счетчиком импульсов, таймером и с первым входом регистрирующего прибора, второй вход которого связан с вторым счетчиком импульсов и пультом управления манипулятора, расширяет функциональные возможности стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2185953C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| СПОСОБ ИМИТАЦИОННОЙ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ СИСТЕМЫ УПРАВЛЕНИЯ РАЗГРУЗОЧНО-ЗАГРУЗОЧНОЙ МАШИНЫ ЯДЕРНОГО РЕАКТОРА | 2011 |
|
RU2479875C1 |
| Стенд для контроля перемещений промышленных роботов-манипуляторов | 1987 |
|
SU1565675A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2003 |
|
RU2252862C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Виброрелаксометр | 1972 |
|
SU467254A1 |
| ПНЕВМАТИЧЕСКИЙ КОНТРОЛЬНО-ДИАГНОСТИЧЕСКИЙ СТЕНД | 2014 |
|
RU2597630C2 |
СТЕНД ДЛЯ ИСПЫТАНИЙ МАНИПУЛЯТОРОВ, содержащий плиту, установленные на ней пульт управления манипулятором, устройство для задания перемещений манипулятора и устройство измерения перемещений манипулятора, включающее датчики, связанные через преобразователи с регистрирующим прибором, отличающийся тем, что, с целью расщирения функциональных возможностей, устройство измерения перемещений манипулятора снабжено таймером, счетчиками импульсов, измерительной головкой, установленной на плите с возможностью перемещения в двух взаимно перпендикулярных плоскостях и снабженной центральным отверстием, вокруг которого в двух взаимно перпендикулярных плоскостях установлены четыре датчика устройства измерения перемещений манипулятора, центральное отверстие сопряжено с подвижным в осевом направлении эталонным валиком, установленным на манипуляторе и сопряженным с датчиком регистрации отказов, связанным своим выходом с первым счетчиком импульсов, таймером и i с первым входом регистрирующего прибора, (Л второй вход которого связан с вторым счетчиком импульсов и пультом управления маС нипулятора. 00 сд о 00 сх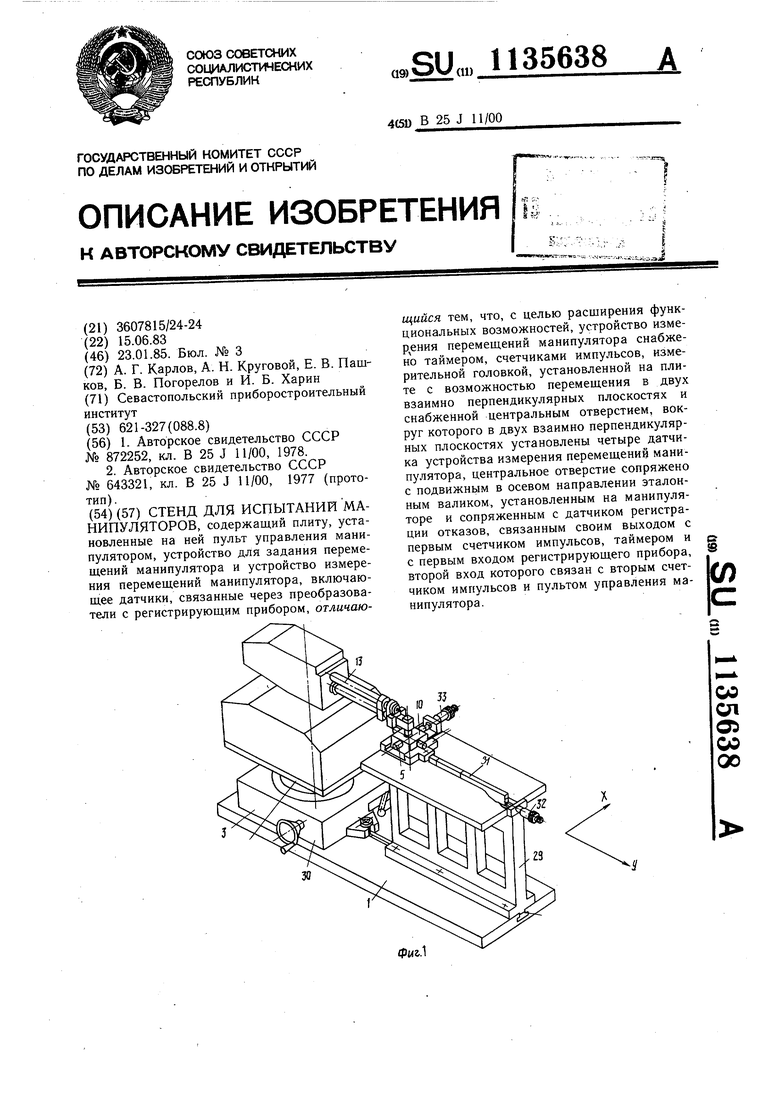
.15
29
Фиг.2
. дпраЫния
Система дпрадления
Таймер
Самописец
7 { k
Счетчик g
15
16 мпукьсоб
12 Z3
Координата X
Датчики шмери тельной ZOMQKU
Стабилизаторы, да8ления
блоки подготовки боздуш
Фиг.5
J6
/V /
«
Счешчак
импульсо8
Координата У
ii
.21
,20
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для оценки качества манипуляторных систем | 1979 |
|
SU872252A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
