1
Изобретение относится к машиностроению, может быть использовано в ро.бототехнике для оценки качестпа роботов, манипуляторов и манипулято ных систем, и является усовершенств ван ием изобретения по основному авт.св. № 1281404.
Цель изобретения - снижение материалоемкости и расширение функциональных возможностей путем измерени скорости перемещения схвата робота по произвольной траектории.
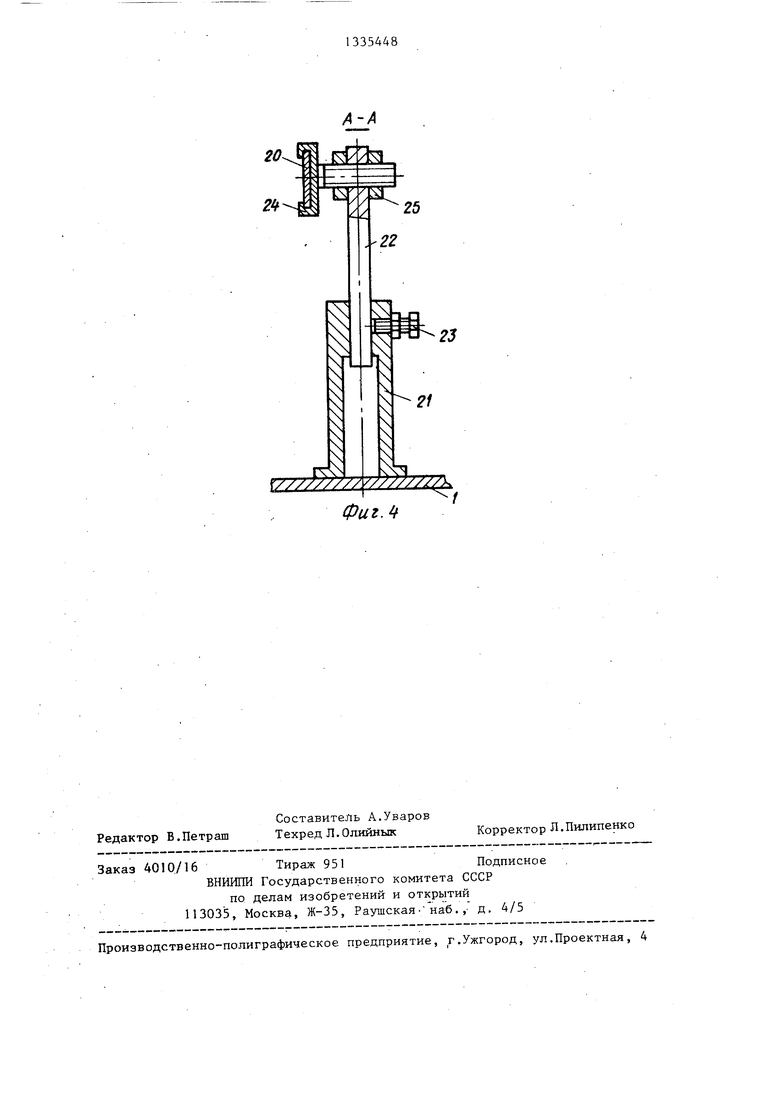
На фиг.1 показан стенд прн измерении скорости перемещения захвата робота по произвольной траектории в вертикальной плоскости; на фиг.2 - то же, в горизонтальной плоскости; на фиг.З - измерительная голот .ка; на фиг.4 - разрез А-А на фиг.2.
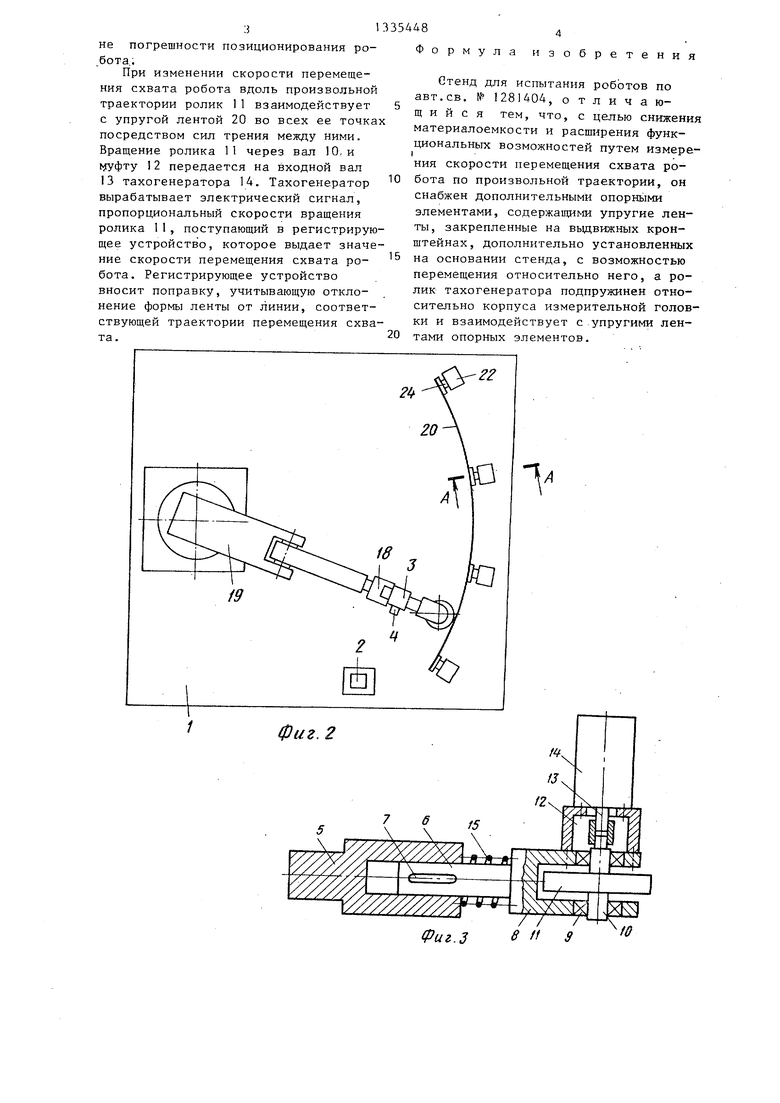
Стенд содержит основание 1, установленные на нем выдвижные упоры 2, измерительную головку 3 с закрепленным в ее корпусе датчиком 4 положения. Измерительная головка содержит корпус 5, установленную с возможностью осевого перемещения штангу 6 зафиксированную от вращения относительно корпуса шпонкой 7. На конце штанги 6 закреплена вилка 8, в подшипниках 9 которой установлен вал 10 с закрепленным на нем роликом 11 Вал 10 с помощью муфты 12 соедине;; с вход1а1м валом 13 тахогенератора 14, закрепленного на вилке 8. Штанга 6.с роликом 11 подпружинена относительно корпуса 5 пружиной 15.
На поверхности 16 основания 1 стенда установлены опорные элементы 17, рабочие поверхности которых предназначены для взаимодействия с |роликом 11. Опорные элементы 17 вы- 1поднены жесткими и нредназначены для измерения, скорости перемещения схвата 18 испытуемого робота 19 по простейшим (прямолинейныг-О траекториям.
Стенд включает дополнительные опорные элементь, содержащие упругие ленты 20, закрепленные на выдвижных кронштейнах, установленных на основании 1. Кронштейны содержат стойки 21, выдвижные штанги 22, установленные в стойках 21 с возможностью осевого перемещения и закрепляемые ,фиксаторами 23, и закрепленные на концах штанг державки 24, в которых установлена упругая лента 20. Державки 24 имеют возможность перемещения
354482 относительно штанг 22 и зафиксированы гайками 25. На штангах 22 нанесены шкалы для отсчета величин переме- щения штанг.
Стенд работает следующим образом. Испь туемый робот 9 устанавливается рядом со стендом. Выдвижные упоры 2 ycтaнaвJ ивaютcя на основании
5
такJчтобы взаимодействие датчика 4
положения с ними происходило при выходе схвата 1В робота 19 в точки его позиционирования. Опорные элементы 17 устанавливаются на основании 1 так, чтобы ролик 11 измерительной головки 3, зажатой в схвате 18 робота 9, взаимодействовал с рабочей поверхностью опорного элемента при движении схвата по траектории, соответствующей этой рабочей поверхности. Опорные элементы 17 используются при измерении скорости перемещения захвата робота по простейшим (прямолинейным) траекториям.
При необходимости измерения скорости схвата робота вдоль произвольной сложной траектории- в вертикальной или горизонтальной плоскости на основании стенда устанавливаются дополнительные опорные элементы для взаимодействия с роликом 11 тахогенератора 14. При этом их стойки 21 устанавливаются и фиксируются, например, с помощью магнитов, закреп- ленных в основаниях стоек, в таких точках основания 1, а их выдвияшые штанги 22 выдвигаются на такие величины, чтобы точки закрепления упругой ленты 20 на кронштейнах соответствовали траектории, по которой производится измерение.скорости захвата робота. Штанги 22 фиксируются фиксаторами 23. Более тонкая регулировка положения точек закрепления упругой ленты 20 на кронштеЙ1- ах осуществляется перемещением державок 24 в штангах 22 с последующей фиксацией державок гайками 25,
Робот осуществляет перемещение своего схвата в различные точки позиционирования. При этом происходит взаимодействие датчика 4 положения с выдвижнь№Г11 упорами 2, в результате чего датчик 4 положения вырабатывает сигналы, свидетельствуюиц е о выходе схвата 18 в точки позиционирования. Разность между наибольшей и наименьшей величинами сигналов от датчика 4 пропорциональна величине погрешности позиционирования робота.
При изменении скорости неремещения охвата робота вдоль произвольной траектории ролик 11 взаимодействует с упругой лентой 20 во всех ее точках посредством сил трения между ними. Вращение ролика П через вал 10,и 1.ГУФТУ 12 передается на входной вал 13 тахогенератора 14. Тахогенератор вырабатывает электрический сигнал, пропорциональный скорости вращения ролика 11, поступающий в регистрирующее устройство, которое выдает значение скорости перемещения схвата робота. Регистрирующее устройство вносит поправку, учитывающую откло- нение формы ленты от линии, соответствующей траектории перемещения схвата.
13
1335448 Ф о
рмула изобретения
Стенд для испытания роботов по авт.св. № 1281404, отличающийся тем, что, с целью снижения материалоемкости и расщирения функциональных возможностей путем измерения скорости перемещения схвата робота по произвольной траектории, он снабжен дополнительными опорнь1ми элементами, содержащими упругие ленты, закрепленные на выдвижных кронштейнах, дополнительно установленных
на основании стенда, с возможностью перемещения относительно него, а ролик тахогенератора подпружинен относительно корпуса измерительной головки и взаимодействует с упругими лентами опорных элементов.
Фиг.З
9П Б ч
--й
/
25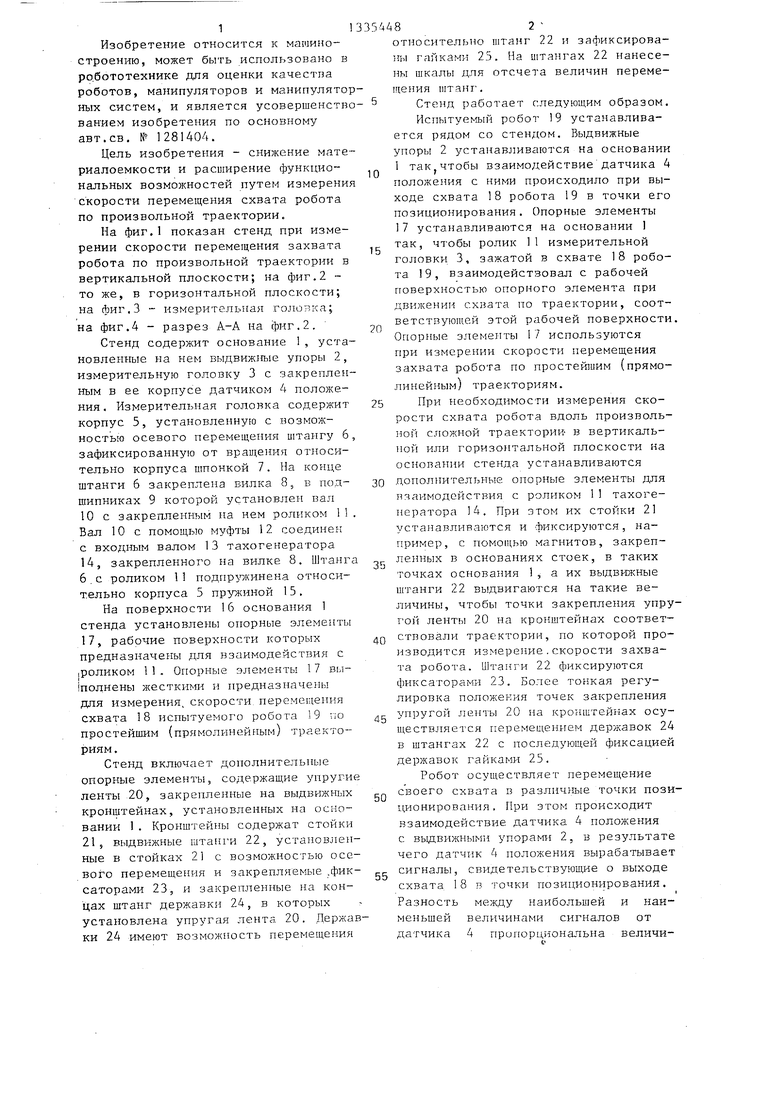
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания роботов | 1985 |
|
SU1281404A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| С-ОБРАЗНЫЕ ШТОКОВЫЕ КЛЕЩИ ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ ЭЛЕКТРОСВАРКИ, ВСТРОЕННЫЕ В РОБОТ | 2001 |
|
RU2221681C2 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2185953C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Способ определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения | 2020 |
|
RU2754423C1 |
| Стенд для испытания промышленных роботов | 1990 |
|
SU1764985A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
Изобретение относится к машиностроению и может быть использовано в робототехнике для оценки качества роботов-манипуляторов. Целью изобретения является снижение материалоемкости и расширение функциональных ; возможностей путем измерения скорости перемещения схвата робота по произвольной траектории. Робот 19, установленный на основании 1 стенда, осуществляет вертикальное или горизонтальное перемещение схвата 18 с закрепленным в нем датчиком 4 положения и измерительной головкой 3 вдоль упругой ленты 20, установленной на выдвижных державках 24. Неоднократно взаимодействуя с выдвижными упорами 2,датчик 4 положения вырабатывает сигналы, свидетельствующие о выходе схвата 18 в точки позиционирования. Разность между наибольшей и наименьшей величинами сигналов с датчика 4 положения пропорциональна погрешности позиционирования. Перемещение схвата 18 с измерительной головкой 3,имеющей подпружиненный ролик, вдоль упругой ленты 20 заданной державками 24 формы, обеспечивает снятие сигнала, пропорционального скорости перемещения с тахогенератора, установленного соосно ролику измерительной головки 3. 4 ил. (У) 00 со О1 4; 4 00 N 77
Редактор В.Петраш
Составитель А.Уваров Техред Л. Олийнык
Заказ 4010./16 Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская . наб.,- д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг.
Корректор Л.Пилипенко
| Стенд для испытания роботов | 1985 |
|
SU1281404A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
