Изобретение относится к станкостроению, в частности к станкам для обработки цилиндрических зубчатых колес методом долбления.
Цель изобретения - повышение точности и производительности обработки за счет автоматизации перемещения каретки и ликвидации разъемного соединения.
На чертеже представлен зубодолбежный станок, общий вид.
пары 20 и 19 передается на главный вал 18 и далее через зубчатые колеса 16 и 17, входной вал 13, зубчатые колеса 12 и 11 - на выходной вал 10. Посредством кривощипа 9 и ползуна 8 это вращательное движение преобразуется в возвратно-поступательное движение П щпинделя 6 с долбяком 7, обрабатывающим заготовку 5. После окончания нарезания заготовки 5, двигатель 24 отключается и включается дополнительный двигаНа станине 1 расположена стойка 2, в Ю тель 29. Движение от двигателя 29 через которой качательно установлен суппорт 3зубчатые колеса 27 и 28 передается гайи стол 4, несущий заготовку 5.ке 26, вращение которой посредством тягового винта 25 преобразуется в поступательное движение nj, каретки 14. Это движение
В суппорт 3 вмонтирован инструментальный щпиндель 6 с возможностью возвратно- поступательного перемещения по стрелке П передается через вал 10 и кривощип 9 пол- долбяка 7 относительно заготовки 5. На щпинделе 6 закреплен ползун 8, соединенный с кривощипом 9, установленным на валу 10. Шестернями И и 12 вал 10 соединен
с валом 13. Валы 10 и 13 являются соответзуну 8, который выводит щпиндель 6 с долбяком 7 за пределы заготовки 5, после чего двигатель 29 отключается. После замены готового изделия новой заготовкой 5, включением двигателя 29 щпиндель 6 с долбяственно входным и выходным валами карет- 20 ком 7 вводится в рабочую зону, двигатель 29 ки 14, установленной с возможностью воз- отключается, включается двигатель 24, цикл
по
вратно-поступательного перемещения стрелке П, в направляющих 15 стойки 2 параллельно оси щпинделя 6. Вал 13 каретки 14 посредством конической пары (коле- са 16 и 17) главного вала 18, кинематических пар 19 и 20 органа настройки 21, кинематических пар 22 и 23 соединен с двигателем 24 привода главного движения станка. Кинематической цепью, включающей тягообработки повторяется.
Формула изобретения
Зубодолбежный станок, включающий станину, смонтированную на ней стойку, размещенный с возможностью качания суппорт, несущий возвратно-поступательно перемещающийся инструментальный шпиндель и
вый винт 25, гайку 26 зубчатые колеса 27 зо механизм вывода его из рабочей зоны, вы- и 28, каретка 14 соединена с дополнительным двигателем 29.
полненный в виде размещенной на направляющих стойки каретки, связанной посредством кривошипно-ползунного механизма с инструментальным щпинделем, а посредством кинематической цепи - с приводом
полненный в виде размещенной на направляющих стойки каретки, связанной посредством кривошипно-ползунного механизма с инструментальным щпинделем, а посредством кинематической цепи - с приводом
Вал 13 установлен с возможностью осевого перемещения.
Станок работает следующим образом.35 станка, отличающийся тем, что, с целью
При включении двигателя 24 вращатель-повышения точности и производительности,
ное движение через кинематические пары 22суппорт
и 23, орган настройки 21, кинематическиестойке.
установлен непосредственно на
пары 20 и 19 передается на главный вал 18 и далее через зубчатые колеса 16 и 17, входной вал 13, зубчатые колеса 12 и 11 - на выходной вал 10. Посредством кривощипа 9 и ползуна 8 это вращательное движение преобразуется в возвратно-поступательное движение П щпинделя 6 с долбяком 7, обрабатывающим заготовку 5. После окончания нарезания заготовки 5, двигатель 24 отключается и включается дополнительный двигапередается через вал 10 и кривощип 9 пол-
зуну 8, который выводит щпиндель 6 с долбяком 7 за пределы заготовки 5, после чего двигатель 29 отключается. После замены готового изделия новой заготовкой 5, включением двигателя 29 щпиндель 6 с долбя ком 7 вводится в рабочую зону, двигатель 29 отключается, включается двигатель 24, цикл
обработки повторяется.
Формула изобретения
Зубодолбежный станок, включающий станину, смонтированную на ней стойку, размещенный с возможностью качания суппорт, несущий возвратно-поступательно перемещающийся инструментальный шпиндель и
механизм вывода его из рабочей зоны, вы-
механизм вывода его из рабочей зоны, вы-
полненный в виде размещенной на направляющих стойки каретки, связанной посредством кривошипно-ползунного механизма с инструментальным щпинделем, а посредством кинематической цепи - с приводом
станка, отличающийся тем, что, с целью
установлен непосредственно на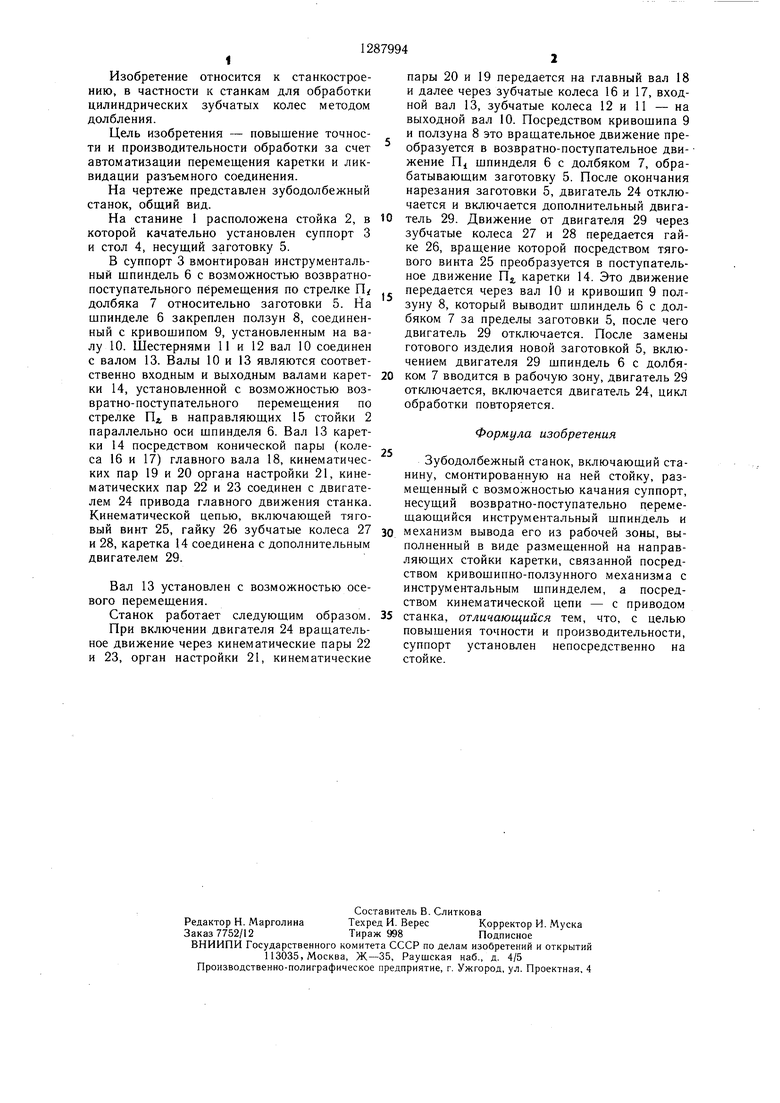
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубодолбежный станок | 1986 |
|
SU1400810A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2011 |
|
RU2475341C2 |
| Двухшпиндельный зубодолбежный станок | 1990 |
|
SU1828788A1 |
| Универсальный зубообрабатывающий станок с ЧПУ | 1987 |
|
SU1715520A1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЗУБЧАТЫХ КОЛЕС | 1994 |
|
RU2076023C1 |
| Роторный зубодолбежный станок | 1985 |
|
SU1324778A1 |
| МНОГОШПИНДЕЛЬНЫЙ ЗУБОДОЛБЕЖНЫЙ СТАНОК | 1991 |
|
RU2009794C1 |
| Зубодолбежный станок | 1979 |
|
SU874284A2 |
| Зубофрезерный станок | 1977 |
|
SU753563A1 |
Изобретение относится к станкостроению, а именно к станкам для обработки цилиндрических зубчатых колес методом долбления. Цель изобретения - повышение точности и производительности зубообработки за счет автоматизации перемещения каретки и ликвидации разъемного соединения. Станок содержит стойку 2, на которой качатель- но установлен суппорт 3, несущий инструментальный щпиндель 6 с долбяком 7. Ползун 8 шпинделя 6 жестко соединен с кривошипом 9, кинематически связанным с двигателем 24 привода главного движения станка. Посредством вала 10 кривошип 9 связан с кареткой 14, смонтированной в направляющих стойки 2 и имеющей автономный привод от двигателя 29. При включении двигателя 24 вращательное движение по кинематической цепи передается на вал 10, после чего преобразуется кривошипом 9 и ползуном 8 в возвратно-поступательное перемещение шпинделя 6 с долбяком 7 относительно заготовки 5. По окончании обработки заготовки 5 двигатель 24 отключается и включается двигатель 29. Движение от двигателя 29 по элементам кинематической цепи передается гайке 26, вращение которой преобразуется тяговым винтом 25 в возвратно-поступательное перемещение каретки 14, которое через вал 10 и кривошип 9 сообщается ползуну 8, выводящему щпиндель 6 с долбяком 7 из рабочей зоны. Включением двигателя 29 не только выводят шпиндель 6 из рабочей зоны, но и устанавливают в новую рабочую зону после смены заготовки 5. 1 ил. i сл fi27 гд ге 1C 00 со со 4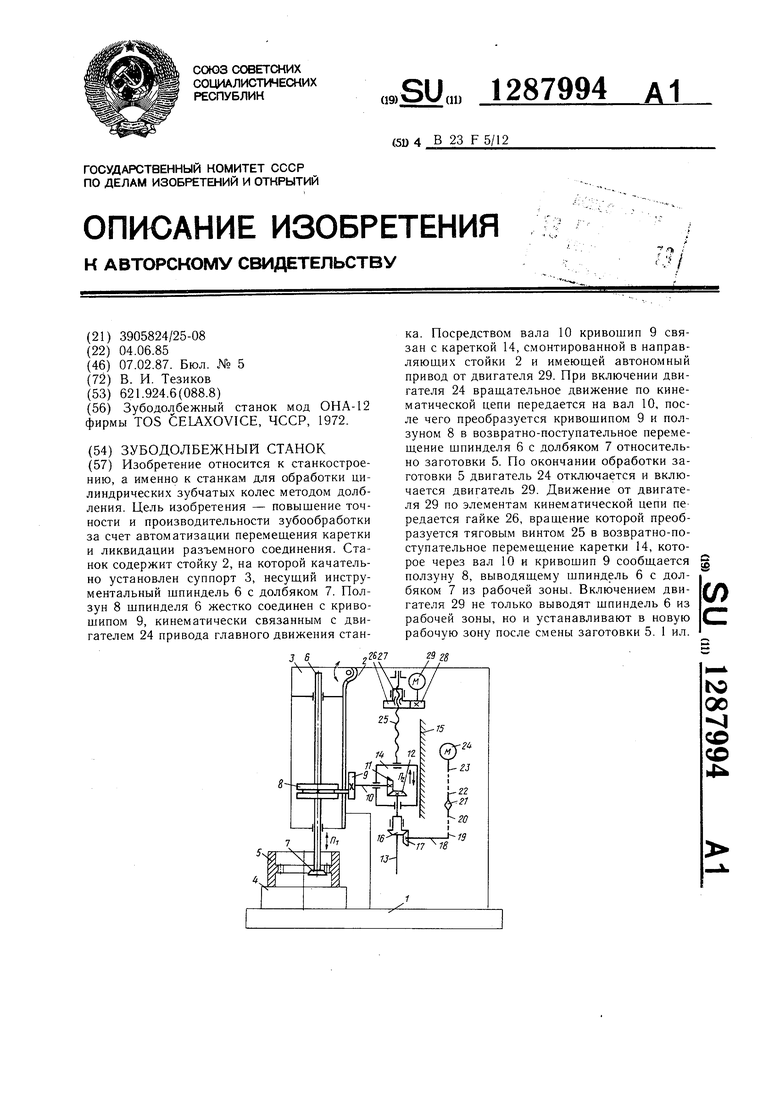
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
