1
Изобретение относится к области электросвязи и другим областям, связанным с приемом модулированных сигналов данных, передаваемых по каналам связи, и предназначено для синхронизации сигналов, передаваемых многопозиционными методами модуляции с использованием корреляционного кодирования, в результате которого на выходе передатчика формируются сигналы с парциальным откликом (биимпульсные сигналы).
Цель изобретения - повышение точности.
На чертеже представлена электронная структурная схема предлагаемого устройства.
Устройство синхронизации приемника многопозиционных сигналов содержит блок 1 коррекции фазы, блок 2 управления фазой, детектор 3, решающий блок 4, декорреля- тор 5, сумматор 6, первый 7 и второй 8 блоки умножения.
Устройство синхронизации приемника многопозиционных сигналов работает сле- дуюш,им образом.
15 ми значениями. Поэтому при формировании сигналов управления работой блока 1 необходимо ориентироваться на случайный, статистически независимый компонент в принимаемом сигнале. Таким образом возникает необходимость в преобразовании (декорре- ляции) принимаемого сигнала с целью выделения этого случайного компонента, т.е. рандомизации сигналов управления подстройки фазы. Если же не учитывать наличие корреляционных связей в принимаемом сигнаОткорректированный сигнал поступает через вход на блок 1, в котором на основании сигналов, вырабатываемых в блоке 2, 25 ле, то управление работой блока 1 будет компенсируется фазовая ошибка, вызван-осуществляться неверно, что приведет к наная несинфазной модуляцией, наличием в канале связи дрожания (джиттера) фазы .несущего колебания и другими факторами. Далее сигнал поступает на решающий блок 4 и детектор 3, в котором осуществляется 30 оценка откорректированного сигнала. Кроме того, в рещающем блоке 4 в каждом подканале определяется разность между откорректированным сигналом, поступающим с выхода блока 1, и его оценкой, подаваемой на решающий блок 4 с выхода детектора 3, т. е. сигнал ошибки (, е.). Сигнал с выхода детектора 3 поступает на декоррелятор 5, сигналы с выхода которого используются для формирования сигналичию существенной погрешности фазы откорректированного сигнала на выходе блока 1, а это, в свою очередь, снижает помехоустойчивость приема сигналов данных.
Формула изобретения
лов, управляющих работой блока 2.
Необходимость использования декорреля- тора 5 в цепи управления подстройкой фазы несущего колебания обосновывается следующим образом.
Устройство синхронизации приемника многопозиционных сигналов, содержащее блок управления фазой, выход которого че35 рез блок коррекции фазы подключен к объединенным первым и вторым входам решающего блока и детектора, выходы которого являются выходами сигналов оценок данных и подключены к другим входам ре,д щающего блока, отличающееся тем, что, с целью повышения точности, введены последовательно соединенные декоррелятор, первый и второй блоки умножения и сумматор, выход которого подключен ко входу блока
управления фазой, а к вторым входам нервоНедостаточная (неполная) компенсация 45 го и второго блоков умножения подключены погрешности фазы в откорректированномсоответственно выходы решающего блока,
сигнале в существенной мере определяет при этом к входам декоррелятора подключе- помехоустойчивость приема сигналов. Осо-ны соответственно выходы детектора.
1288924
бенно ярко это проявляется при приеме многопозиционных сигналов с большим числом градаций амплитуды. Коррекция фазы в блоке 2 осуществляется на основании анализа проекций отсчетного значения принима емого
5 сигнала на когерентные колебания R и Q. При этом для правильного формирования сигналов управления, поступающих с выхода блока 2, необходимо, чтобы анализируемые отсчетные значения были статически незави0 симыми.
Однако отсчетные значения сигналов с парциальным откликом не обладают такой независимостью, т. е. имеются корреляционные связи между отдельными (в зависимости от используемого класса сигналов) отсчетны5 ми значениями. Поэтому при формировании сигналов управления работой блока 1 необходимо ориентироваться на случайный, статистически независимый компонент в принимаемом сигнале. Таким образом возникает необходимость в преобразовании (декорре- ляции) принимаемого сигнала с целью выделения этого случайного компонента, т.е. рандомизации сигналов управления подстройки фазы. Если же не учитывать наличие корреляционных связей в принимаемом сигна0
5 ле, то управление работой блока 1 будет осуществляться неверно, что приведет к на ле, то управление работой блока 1 будет осуществляться неверно, что приведет к наличию существенной погрешности фазы откорректированного сигнала на выходе блока 1, а это, в свою очередь, снижает помехоустойчивость приема сигналов данных.
Формула изобретения
Устройство синхронизации приемника многопозиционных сигналов, содержащее блок управления фазой, выход которого через блок коррекции фазы подключен к объединенным первым и вторым входам решающего блока и детектора, выходы которого являются выходами сигналов оценок данных и подключены к другим входам рещающего блока, отличающееся тем, что, с целью повышения точности, введены последовательно соединенные декоррелятор, первый и второй блоки умножения и сумматор, выход которого подключен ко входу блока
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой приемник многопозиционных сигналов | 1982 |
|
SU1062890A1 |
| Цифровой приемник многопозиционных сигналов | 1986 |
|
SU1417208A1 |
| Устройство для приема сигналов с парциальным откликом | 1983 |
|
SU1117855A1 |
| Устройство для передачи дискретной информации многопозиционным кодом | 1977 |
|
SU658756A2 |
| Устройство для адаптивной коррекции межсимвольных искажений | 1981 |
|
SU951725A1 |
| Цифровой адаптивный корректор сигнала с парциальным откликом | 1982 |
|
SU1073890A1 |
| Устройство адаптивной коррекции в частотной области с отображением характеристик | 1984 |
|
SU1298928A2 |
| Цифровой корректор сигналов | 1979 |
|
SU862366A1 |
| Устройство оценки вероятностиОшибКи СигНАлОВ | 1978 |
|
SU799155A1 |
| Адаптивный приемник сигналов данных | 1989 |
|
SU1672580A1 |
Изобретение относится к электросвязи. Цель изобретения - повышение точности. Устр-во содержит блок 1 коррекции фазы, блок 2 управления фазой, детектор 3, ре- шаюнлий блок 4. Вновь введены последовательно соединенные декоррелятор 5, блоки 7 и 8 умножения и сумматор 6. 1 ил. o 00 00 (;о го N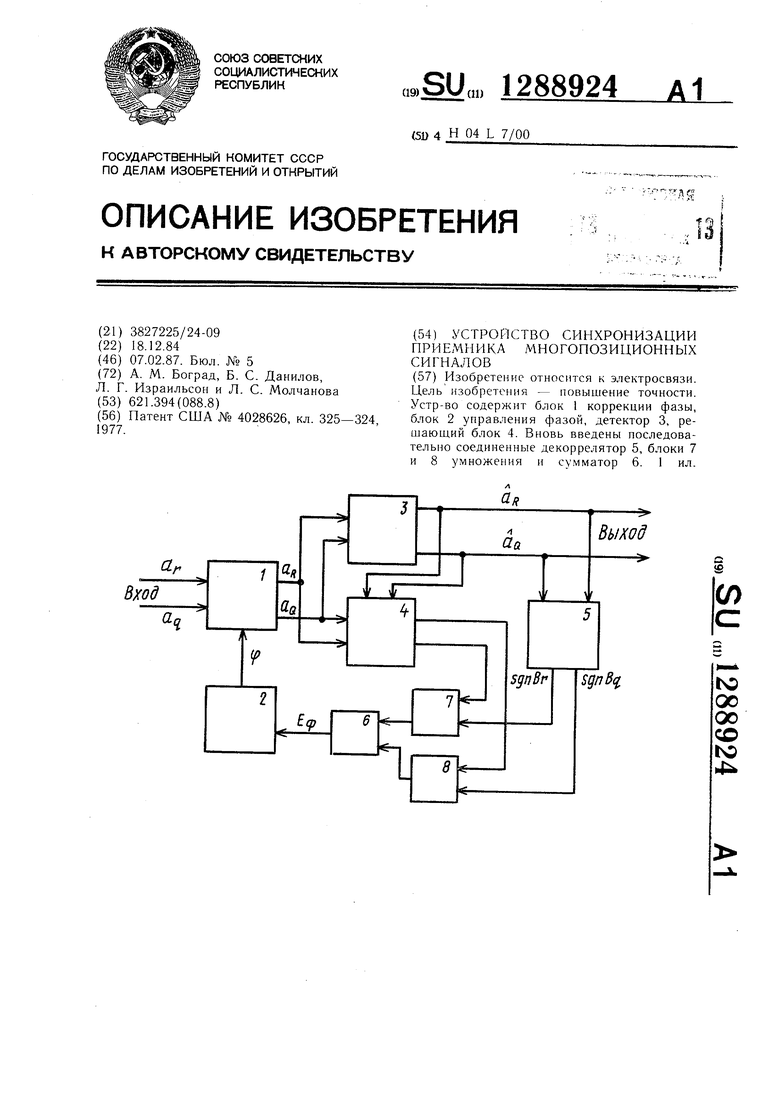
| Патент США № 4028626, кл | |||
| Водяной двигатель | 1921 |
|
SU325A1 |
