Изобретение относится к робототехнике и может быть использовано в конструкциях механических рук роботов.
Цель изобретения - повышение точности позиционирования.
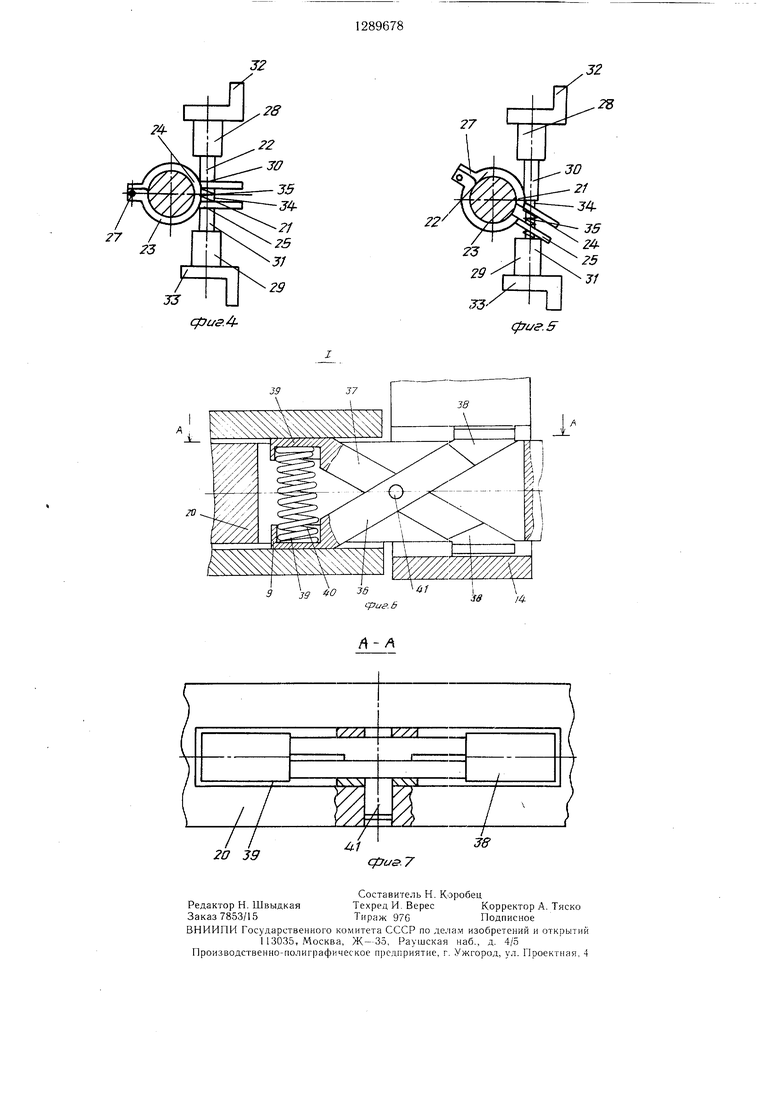
На фиг. 1 ноказана механическая рука, продольный разрез; на фиг. 2 - зубчатые колеса, разрез; на фиг. 3 - положение блокировочного устройства при работе; на фиг. 4 и 5 - то же, вариант; на фиг. б - узел I на фиг. 1; на фиг. 7 - разрез А-А на фиг. 6.
Механическая рука робота состоит из двигателя 1, связанного посредством муфты 2 и входного вала 3, установленного в подшипниках 4 и 5, с разрезным по ширине входным зубчатым колесом 6, состояш.им из двух частей 7 и 8. Колесо 6 связано с промежуточным зубчатым колесом 9, которое в свою очередь связано с разрезным по ширине выходным зубчатым колесом 10, состоящим из двух частей 11 и 12, а ее ровочные устройства 13, 14, 15 и механизм разведения колодок 16 установлены в подвижных друг относительно друга звеньях 17, 18, 19 с осью шарнира 20 и выходным валом 21. Каждое из блокировочных устройств 13, 14, 15 состоит из двух фрикционных колодок 22 и 23 с проушинами 24 и 25 с продольными пазами 26, имеюгцих ось поворота 27. Приводные цилиндры 28 и 29 с полыми штоками 30 и 31, закрепленные за уголки 32 и 33, расположены на направляющей оси 34. Между проушинами 24 и 25 расположена пружина сжатия 35 и выходной вал 21. Механизм разведения колодок 16 представляет собой два двуплечих рычага 36 и 37 с правыми упорами 38, левыми упорами 39 и пружиной 40, расположенной между ними, с общей осью поворота 41.
Механическая рука робота работает следующим образом.
При работе двигатели 1 через муфту 2 вращение передается входьюму валу 3 относительно подпшпников 4 и 5 и далее -- входно.му зубчатому колесу 6. При этом часть 7 передает вращение колесу 9, а при реверсировании двигателя 1 часть В передает вращение колесу 9 (фиг. 2).
Таким образом устраняется люфт в зацеплении, обусловленный боковым зазором и повышается точность позип,иопировапия. Смещение части 7 относительно части 8 в зубчатом колесе 6 достигается при изготовлении, т. е. после нарезания зубьев цельное колесо 6 разрезают на две части 7 и 8, смещают друг относительно друга и закрепляют между собой болтовым соединением (не показано) .
При заторможенном блокировочном устройстве 13 и 14 и расторможенном 15 (фиг. 3) вращение от колеса 9 передается колесу 10, состоящему из двух половин 11 и 12, аналогичных колесу 6. Вращение ко.леса 10 передается непосредственно выходному валу 21, связанному со схвато.м (не показан). При затормаживании выходного вала 21 (фиг. 4) полые штоки 30 и 31 относительнс направляющей оси 34 двух противоположно установленных приводных цилиндров 28 и 29 перемещают навстречу друг другу две фрикционные колодки 22 и 23, действуя на их проушины 24 и 25, содержащие продольные пазы 26, и затормаживают
выходной вал 21. После затормаживания выходного вала 21 происходит его точный доворот с низкой скоростью (фиг. 5). При этом шток 30 выдвигается из приводного цилиндра 28, а шток 31 вдвигается в приводной цилиндр 29 таким образом, что выходной вал 21, не проворачиваясь относительно двух фрикционных колодок 22 и 23, поворачивается вместе с фрикционными колодками на необходимый угол. При такой низкой скорости доворота устраняется влияние инерционности подвижных частей руки и двигателя 1 на тормозной путь при Остановке выходного вала 21. Растормаживание блокировочного устройства происходит при вдвигании обоих штоков 30 и 31 в приводные цилиндры 28 и 29 (фиг. 3), закрепленные за уголки 32 и 33 к звену 19. Разжатие обеих фрикционных колодок 22 и 23 относительно выходного вала 21 происходит за счет пружины сжатия 35. Обе фрикционные колодки поворачиваются относительно общей оси 27. При затормаживании блокировочных устройств 13, 15 и растормаживании блокировочного устройства 14 колесо 9 становится неподвижным из-за контакта с заторможенным колесо.м 10. При этом колесо 9 при помощи механизма разведения колодок затормаживается также относительно оси njapHHpa 20 (фиг. 6, 7), т. е. пружина 40, разжимая рычаги 36 и 37 и уноры 38 и 39, воздействует на внутреннюю поверхность ступицы колеса 9.
Вращающееся колесо 6 заставляет обкатываться неподвижное колесо 9, и при этом происходит поворот звена 19 вокруг оси щарнира 20. После затормаживания блокировочным устройством 14 в определенном положении оси шарнира 20 происходит его
точный доворот до необходимого положения. Механизм разведения колодок растормаживает колесо 9 относительно щарнира 20, так как блокировочное устройство 14 вступает в контакт с упорами 38 и происходит их поворот относительно оси 41 и тем самым колесо 8 получает возможность вращения независимо от оси щарнира 20, которая в данный момент неподвижна вследствие воздействия на ее фрикционных колодок блокировочного устройства 14. При затормаживании блокировочных устройств 14, 15 и растор- мажива}ши блокировочного устройства 13 колесо 9, отсоединенное от затор.моженной осп 1парнира 20, неподвижно из-за контакта
с заторможенным колесом 10. Вращающееся колесо 6 заставляет обкатываться колесо 9, при этом звено 18 поворачивается относительно неподвижного звена 17. В определенном положении звена 18 происходит его затормаживание блокировочным устройством 13 в точный доворот до необходимого положения относительно неподвижного звена 17. Возможен режим, когда двигатель 1 не работает и входной вал 3 может свободно вращаться, блокировочные устройства могут одновременно поворачивать подвижные звенья 18, 19 и выходной вал 21 друг относительно друга на ограниченные углы.
Формула изобретения
1. Механическая рука робота, содержащая три шарнирно соединенных между собой звена, оси щарниров которых расположены взаимно перпендикулярно, а привод их относительного поворота выполнен в виде двигателя, жестко связанного с первым звеном и конической передачей, входное и выходное зубчатые колеса которой жестко связаны соответственно с входным и выходным валами, соосно установленными на втором и третьем звеньях, и промежуточное зубчатое колесо которой установлено на оси щарнира, соединяющей эти звенья, два блокировочных устройства, одно из которых установлено с возможностью обеспечения
жесткой связи третьего звена и выходного вала, отличающаяся тем, что, с целью повы- щения точности позиционирования, второе блокировочное устройство установлено с возможностью обеспечения жесткой связи первого и второго звена, а дополнительно введенное третье блокировочное устройство установлено с возможностью обеспечения жесткой связи третьего звена и оси шарнира, соединяющей второе и третье звенья, причем каждое блокировочное устройство установлено с возможностью доворота звена его приводным органом.
2.Рука робота по п. 1, отличающаяся тем, что каждое блокировочное устройство выполнено в виде шарнирно связанных между собой двух фрикционных колодок, снабженных приводными цилиндрами, щтоки которых установлены с возможностью взаимодействия с соответствующими колодками, и снабжено механизмом разведения колодок.
3.Рука робота по п. 2, отличающаяся тем, что механизм разведения колодок выполнен в виде пружины сжатия, расположенной на оси, которая установлена в соосных отверстиях штоков приводных цилиндров.
4.Рука робота по п. 2, отличающаяся тем, что механизм разведения колодок выполнен в виде двух щарнирно связанных между собой двуплечих рычагов, одни плечи которых шарнирно связаны с колодками, а вторые подпружинены друг относительно друга.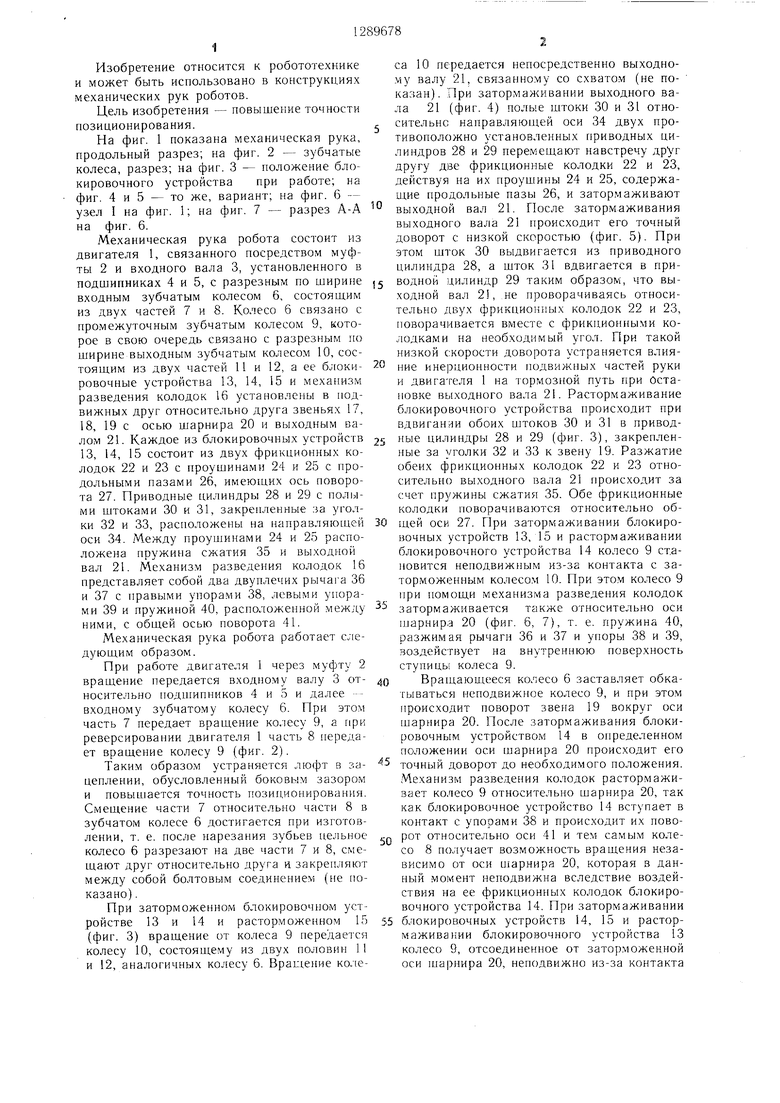

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации зазора в тормозных системах транспортных средств | 1983 |
|
SU1160155A1 |
| Тормоз прицепного рельсового транспортного средства | 1983 |
|
SU1291472A1 |
| Сварочная установка | 1986 |
|
SU1388240A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Устройство доворота шпинделя станка | 1979 |
|
SU1066775A1 |
| Стояночный тормоз заднего колеса с механизмом перемещения колодок и суппортом заднего тормоза | 2023 |
|
RU2830014C1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| Манипулятор | 1983 |
|
SU1098791A1 |
| МУФТА-ТОРМОЗ | 1987 |
|
RU2032118C1 |
| Канатная дорога | 1987 |
|
SU1421578A1 |
Изобретение относится к области робототехники и может быть использовано в конструкциях .механических рук роботов. Цель изобретения - повышение точности позиционирования. Рука содержит три шарнирно соединенных между собой звена 17, 18, 19 и три блокировочных устройства 13, 14, 15, причем блокировочное устройство 15 установлено с возможностью обеспечения жесткой связи третьего звена 19 и выходного вала 21, блокировочное устройство 13 - с возможностью обеспечения жесткой связи первого звена 17 и второго звена 18, а дополнительно введенное третье блокировочное устройство 14 - с возможностью обеспечения жесткой связи третьего звена 19 и оси шарнира 20, при этом каждое блокируюшее устройство установлено с возможностью до- ворота звена его приводным органом. 3 з. п. ф-лы, 7 ил. « (Л N3 00 со Q5 00 фиг-.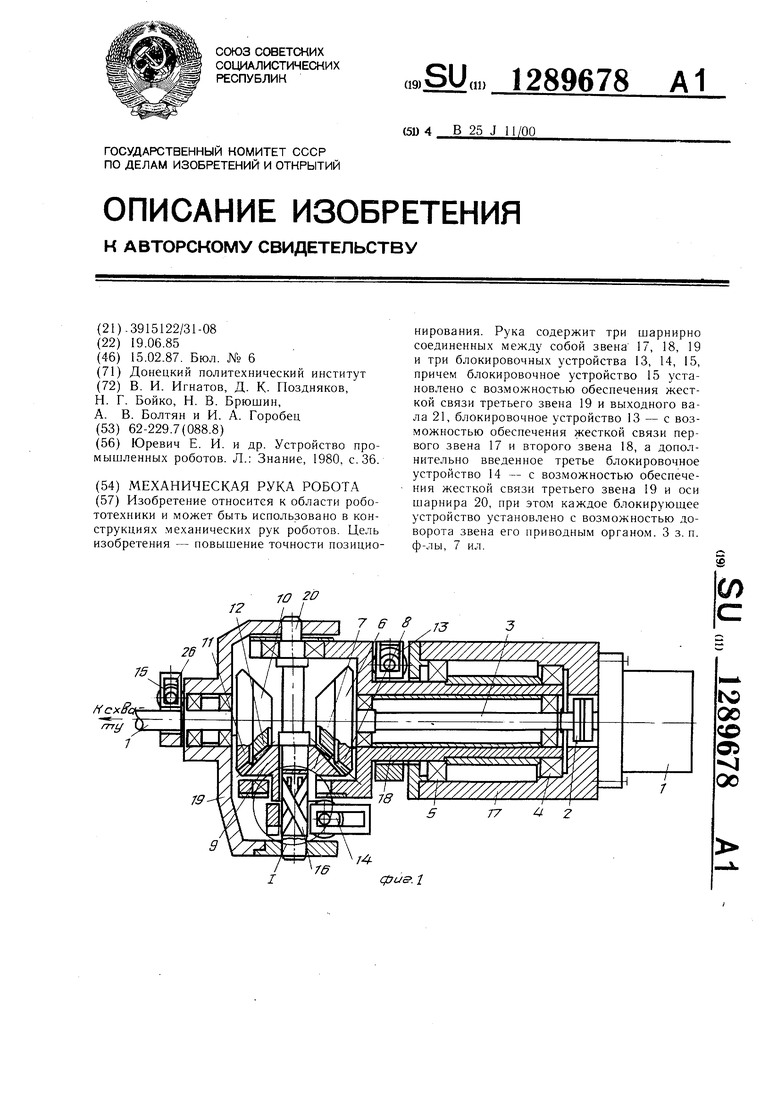
qyu5-.2
2428
4
JJ
29
27
J3
cpuff.4cp ue.ff
Л
I
39/4
//
.
1X3:
/ /
20 39
4
Редактор H. Швыдкая Заказ 7853/15
Составитель H. Коробец
Техред И. ВересКорректор А. Тяско
Тираж 970Подписиое
ВНИИПИ Государственного комитета СССР по де.мам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое п)едприятие, г. Ужгород, ул. Проектная, 4
Jff
cfrus.7
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л.: Знание, 1980, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
