Изобретение относится к машиностроению, а HiVieHHo к манипуляторам и промышленным роботам, и может быть использовано для автоматизации операций загрузкиразгрузки металлорежущих станков, в особенности при токарной обработке в центрах.
Известен манипулятор, содержащий укрепленный на руке схват, связанный с приводом, узел ориентации и блок фиксации зажима детали в схвате, выполненный в виде силового цилиндра с нажимным поршнем и цангового зажима штока этого силового цилиндра 1.
Недостатками известного манипулятора являются возникновение внутренних усилий и деформации детали при захвате ее за необработанные поверхности, а также необходимость базовых отверстий в детали и направляющих в схвате, что сужает область его использования.
Цель изобретения - расширение технологических возможностей манипулятора.
Цель достигается тем, что в манипуляторе, содержащем укрепленный на руке схват, связанный с приводом, узел ориентации детали и блок фиксации зажима детали в схвате, выполненный в виде силового цилиндра с нажимным поршнем и цангового зажима штока этого силового цилиндра, цанговый штока силового цилиндра блока фиксации выполнен в виде гильзы со сферической наружной поверхностью и подвижной и неподвижной сферических фрикционных колодок, разделенных распорной пружиной, при этом блок фиксации зажима детали снабжен гидроцилиндром, в котором размещен цанговый зажим, а его подвижная и. неподвижная сферические фрикционные колодки размещены на внутренней поверхности силового цилиндра.
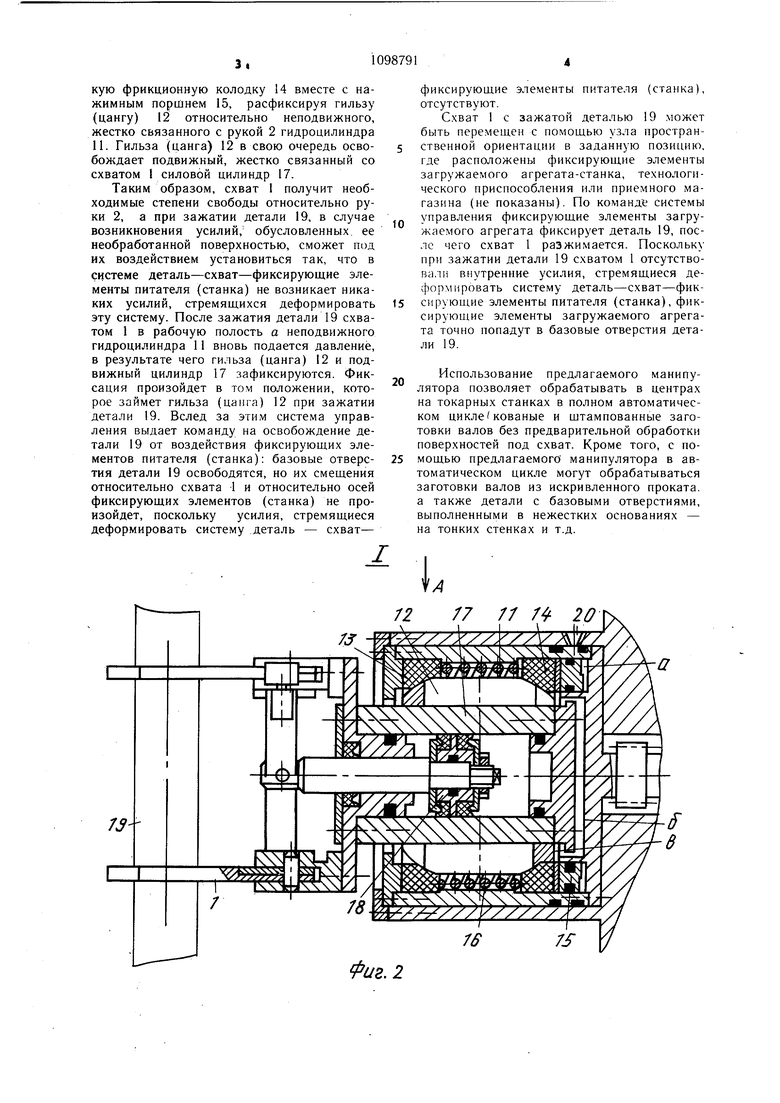
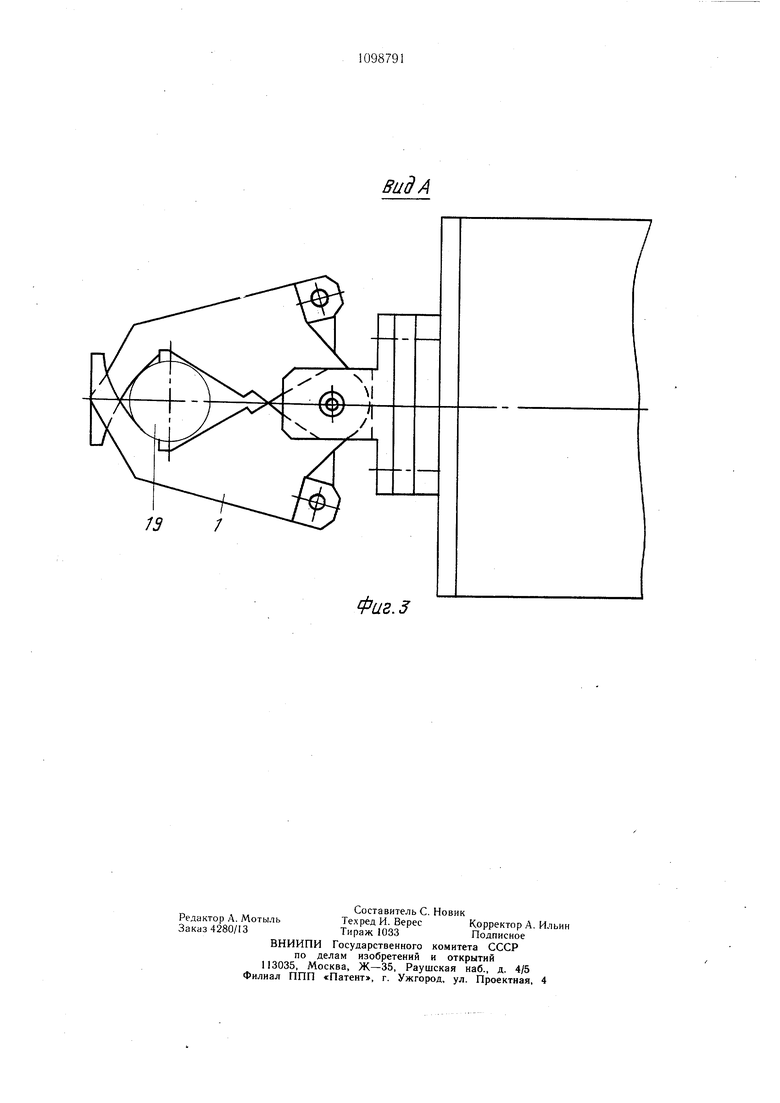
На фиг. 1 схематически представлен манипулятор; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - вид А на фиг. 2.
Автоматический манипулятор состоит из схвата 1, соединенного с рукой 2 посредством блока 3 фиксации зажима детали, а также узла пространственной ориентации, выполненного в виде блока 4 продольного перемещения руки 2 относительно каретки 5, блока 6 подъема каретки 5 относительно колонны 7, блока 8 поворота колонны 7 относительно основания 9 и блока перемещения манипулятора (не показан) вдоль оси станка на к;атках 10.
Блок 3 фиксации зажима детали состоит из неподвижного и жестко связанного с рукой 2 гидроцилиндра 11, внутри которого размещена гильза (цанга) 12 со сферической наружной поверхностью, контактирующей с неподвижной сферической фрикционной колодкой 13 и с подвижной сферической фрикционной колодкой 14, и нажимной порщень 15, вааимодействующий с подвижной сферической фрикционной колодкой 14, при этом между упомянутыми фрикционными колодками 13 и 14 размещена распорная пружина 16, а в гильзе (цанге) 12 установлен подвижный и жестко связанный со схватом 1 силовой цилиндр 17, внутри которого вмонтирован механизм 18 зажима схвата 1.
Манипулятор работает следующим образом.
в соответствии с программой рабочего цикла, выдаваемой системой управления манипулятором (не показана), схват 1 с помощью узла пространственной ориентации (блока 4 продольного перемещения,
5 блока б подъема, блока 8 поворота и блока перемещения вдоль оси станка на катках 10) выводится в заданную позицию для захвата детали 19, которая расположена в разгружаемом агрегате - в питателе
Q или на станке (не показаны) и зафиксирована там принадлежащими этому агрегату фиксирующими элементами (не показаны), введенными в базовые отверстия детали 19 (не показаны), например зажата в центрах токарного станка. При этом в рабочую
5 полость а неподвижного гидроцилиндра 11 через отверстие 20 подана под давлением рабочая жидкость, в результате чего нажимной порщень 15 находится в крайнем левом положении. Под воздействием усилия нажимного поршня 15 подвижная сфе рическая фрикционная колодка 14 прижнмает гильзу (цангу) 12 со сферической наружной поверхностью к неподвижной сферической фрикционной колодке 13, одновременно сжимая распорную пружину
16, в результате чего указанная гильза (цанга) 12 зафиксирована от поворота относительно неподвижного гидроцилиндра 11 в любом направлении. Одновременно, благодаря усилию, передаваемому на цангу 12 через подвижную сферическую фрик0 ционную колодку 14, цанга 12 фиксирует от продольного перемещения, ограниченного пространством между поверхностями бив, подвижный и жестко связанный со схватом 1 силовой цилиндр 17. Таким обра- зом, схват 1 жестко зафиксирован относительно руки 2 манипулятора.
После выхода схвата 1 в исходное положение для захвата детали 19 система управления манипулятором выдает команду на зажатие схвата 1, которая отрабатывается
0 механизмом 18 зажима схвата 1. Одновременно (или с выдержкой времени, или по моменту касания детали 19 одной из челюстей схвата 1) система управления выдает команду, по которой рабочая полость а неподвижного гидроцилиндра 11 соеди5 няется с магистралью слива гидросистемы (не показана), в результате чего давление в рабочей полости а падает. Распорная пружина 16 отжимает подвижную сферическую фрикционную колодку 14 вместе с нажимным поршнем 15, расфиксируя гильзу (цангу) 12 относительно неподвижного, жестко связанного с рукой 2 гидроцилиндра 11. Гильза (цанга) 12 в свою очередь освобождает подвижный, жестко связанный со схватом 1 силовой цилиндр 17.
Таким образом, схват 1 получит необходимые степени свободы относительно руки 2, а при зажатии детали 19, в случае возникновения усилий, обусловленных, ее необработанной поверхностью, сможет под их воздействием установиться так, что в системе деталь-схват-фиксирующие элементы питателя (станка) не возникает никаких усилий, стремящихся деформировать эту систему. После зажатия детали 19 схватом 1 в рабочую полость а неподвижного гидроцилиндра 11 вновь подается давление, в результате чего гильза (цанга) 12 и подвижный цилиндр 17 зафиксируются. Фиксация произойдет в том положении, которое займет гильза (цанга) 12 при зажатии детали 19. Вслед за этим система управления выдает команду на освобождение детали 19 от воздействия фиксирующих элементов питателя (станка): базовые отверстия детали 19 освободятся, но их смещения относительно схвата 1 и относительно осей фиксирующих элементов (станка) не произойдет, поскольку усилия, стремящиеся деформировать систему деталь - схват-
фиксирующие элементы питателя (станка), отсутствуют.
Схват 1 с зажатой деталью 19 может быть перемещен с помощью узла пространственной ориентации в заданную позицию, где расположены фиксирующие элементы загружаемого агрегата-станка, технологического приспособления или приемного магазина (не показаны). По команде системы управления фиксирующие элементы загружаемого агрегата фиксирует деталь 19, после чего схват 1 разжимается. Поскольку при зажатии детали 19 схватом 1 отсутствоFja.TH внутренние усилия, стремящиеся деформировать систему деталь-схват-фиксирующие элементы питателя (станка), фиксирующие элементы загружаемого агрегата точно попадут в базовые отверстия детали 19.
Использование предлагаемого манипулятора позволяет обрабатывать в центрах на токарных станках в полном автоматическом циклекованые и штампованные заготовки валов без предварительной обработки поверхностей под схват. Кроме того, с помощью предлагаемого манипулятора в автоматическом цикле могут обрабатываться заготовки валов из искривленного проката, а также детали с базовыми отверстиями, выполненными в нежестких основаниях - на тонких стенках и т.д. 77 // 7 Фиг, 2 20
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Машина для очистки наружной поверхности цилиндрических изделий | 1976 |
|
SU657878A1 |
| Манипулятор | 1986 |
|
SU1400873A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Токарный многошпиндельный станок | 1989 |
|
SU1660850A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| АГРЕГАТНЫЙ СТАНОК | 1970 |
|
SU275652A1 |
| Задняя бабка токарного станка | 1980 |
|
SU921687A1 |
| Автоматическая линия спутникового типа | 1985 |
|
SU1505757A1 |
МАНИПУЛЯТОР, содержащий укрепленный на руке схват, связанный с приводом, узел ориентации и блок фиксации зажима детали в схвате, выполненный в виде силового ци,г1индра с нажимным поршнем и цангового зажима П1тока этого силового ци.чнндра, отличающийся тем, что, с целью расширения технологических возможHOCTeii, цанговый зажим штока си.чового цилиндра блока фиксации выполнен в виде гильзы со сферической наружной noficj xностью и подвижной и неподвижной сферических фрикционных колодок, разделенных распорной пружиной, при этом блок фиксации зажима детали снабжен гидроцилиндром, в котором размешен цанговьи зажим, а его подвижная и неподвижная сферические фрикционные колодки размешены на внутренней поверхности силового цилиндра. (Л со 00 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический манипулятор | 1976 |
|
SU582944A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
