1
Изобретение относится к грузозахватным устройствам и может быть использовано при создании различных манипуляторов, в том числе дистанционных, где необходим точный охват предметов.
Известен захват манипулятора, содержащий привод и механизм сведения губок, выходные полуоси которого кинематически связаны с губками захвата 11 .
Однако известный захват не обеспечивает надежного зажима тонкостенных деталей.
Цель изобретения - упрощение конструкции и обеспечение надежного зажима транспортируемых деталей.
Для этого в предлагаемом захвате механизм сведения губок выполнен в виде двух соосных ползущек, связанных с одной стороны шарнирными тягами с захватами, а с другой стороны через упругую связь - с приводом захвата.
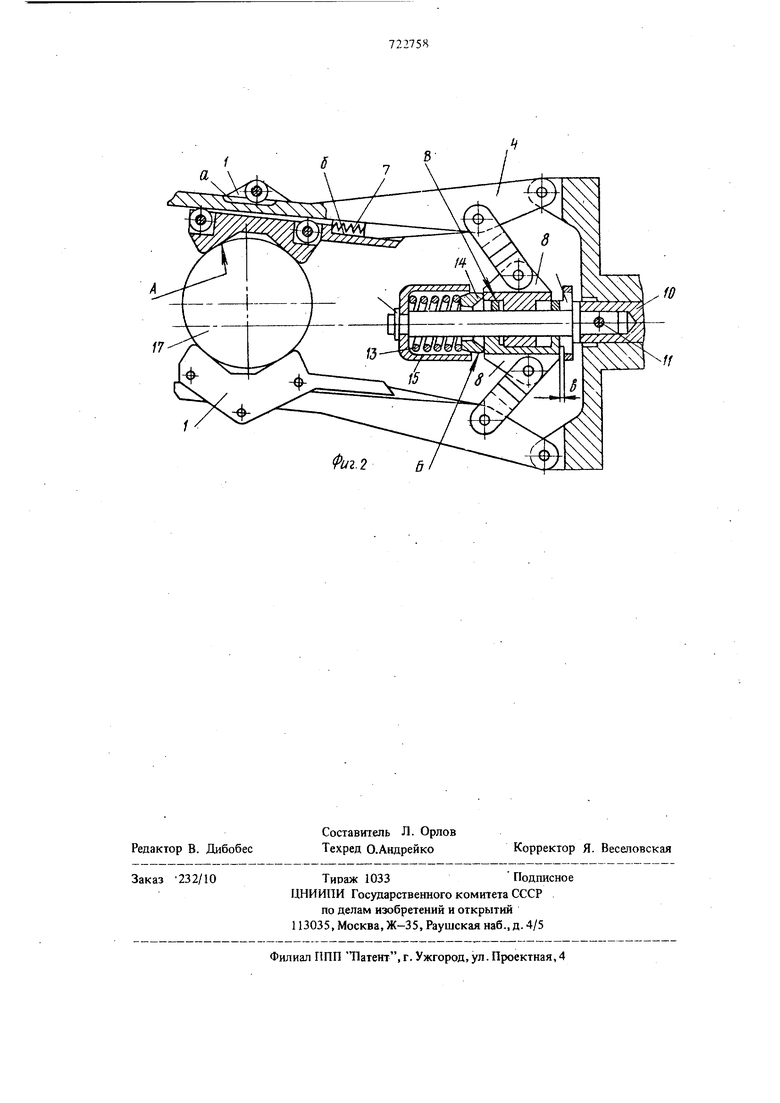
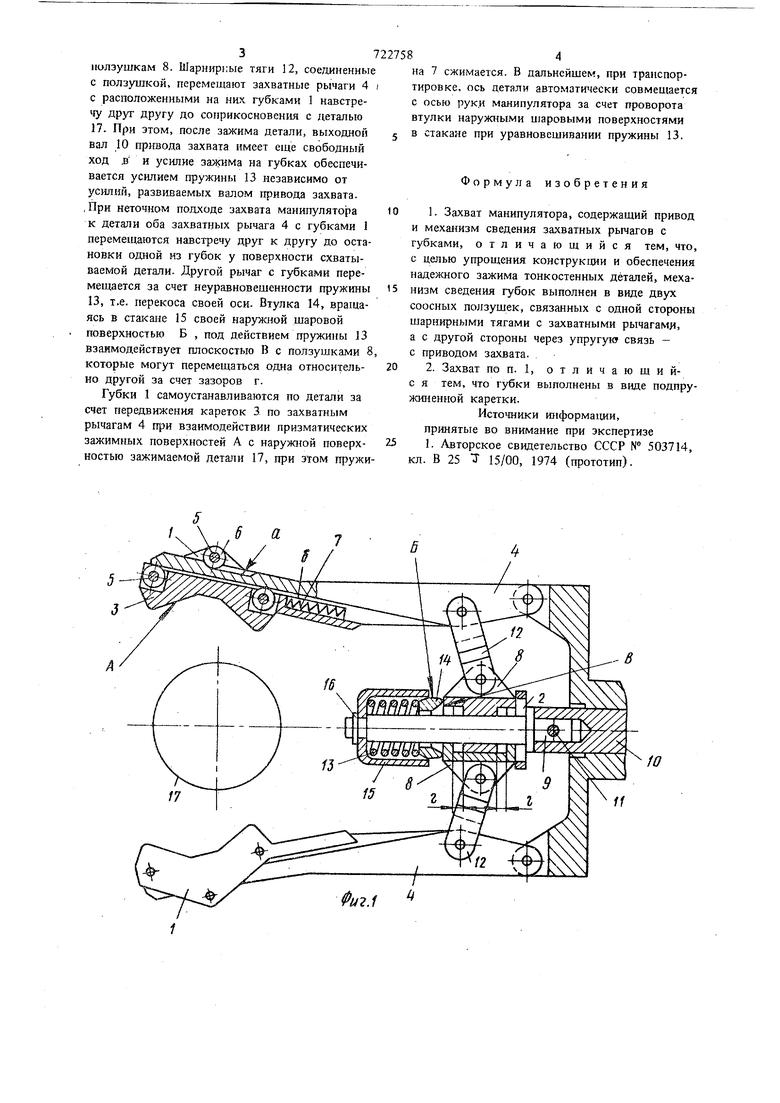
На фиг. 1 изображен описываемый захват, в исходном положении; на фиг. 2 - то же, в рабочем положении.
Захват манипулятора состоит из двух зажимных губок 1 и силового привода с механизмом 2 сведения губок. Губки 1, выполненные в виде кареток 3 с призматическими зажимными поверхностями А, расположены на двуплечих рычагах 4 с возможностью передвижения по внешним и внутренним поверхностям последних с помощью роликов 5, сидящих на осях 6. Для ограничения хода кареток 3 на внещних поверхностях захватных рычагов 4 выполнены пазы а, на их внутренних поверхностях в пазах б установлены пружины 7.
Механизм 2 сведения губок содержит две ползущки 8, установленные свободно без закрепления на валике 9, жестко скрепленным с выходным валом 10 силового привода щтифтом 11. Ползушки 8 связаны с одной -стороны шарнирными тягами 12 с захватными рычагами 4, а с другой стороны - с выходным валом 10 привода захвата упругой связью, пружиной 13 через втулку 14 с шаровой наружной поверхностью Б. Пружина 13, втулка 14 и ползушки 8 расположены внутри стакана 15, жестко закрепленного на валу 10 кольцом 16.
Движение выходного вала 10 привода влево передается через пружину 13 и втулку 14
иолэушкам 8. Шарн1тр1;ые тяги 12, соединенные с ползушкой, перемещают захватные рычаги 4 с расположенными на них губками 1 навстречу друг другу до соприкосновения с деталыо 17. При этом, после зажима детали, выходной вал 10 привода захвата имеет еще свободный ход ,в и усилие зажима на губках обеспечивается усилием пружины 13 независимо от усилий, развиваемых валом гфивода захвата. , При неточном подходе захвата манипулятора к детали оба захватных рычага 4 с губками 1 перемещаются навстречу друг к другу до остановки одной из губок у поверхности схватываемой детали. Другой рычаг с губками перемещается за счет неуравновешенности пружины 13, т.е. перекоса своей оси. Втулка 14, вращаясь в 15 своей наружной щаровой поверхностью Б , под действием пружины 13 взаимодействует плоскостыо В с ползушками 8 которые могут перемещаться одна относительно другой за счет зазоров г.
Губки 1 самоустанавливаются по детали за счет передвижения кареток 3 по захватным рычагам 4 при взаимодействии призматических зажимных поверхностей А с наружной поверхкостью зажимаемой детали 17, при этом пружина 7 сжимается. В дальнейшем, при транспортировке, ось детали автомати11ески совмещается с осью руки манипулятора за счет проворота втулки наружными и1аровыми поверхностями в стакане при уравновешивании пружины 13.
Формула изобретения
1.Захват манипулятора, содержащий привод и механизм сведения захватных рычагов с губками, отличающийся тем, что, с целью упрощения конструквди и обеспечения надежного зажима тонкостенных деталей, механизм сведения губок выполнен в виде двух соосных ползушек, связанных с одной стороны щарнирными тягами с захватными рычагамя,
а с другой стороны через упругую связь с приводом захвата.
2.Захват по п. 1, отличающийс я тем, что губки выполнены в виде подпружиненной каретки.
Источники информации, принятые во внимание при экспертизе 1. .Авторское свидетельство СССР N 503714, кл. В 25 1 15/00, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Схват манипулятора | 1984 |
|
SU1301696A1 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1115883A1 |