Изобретение относится к захватам. Цель изобретения - повышение производительности труда путем автоматизации процесса отрыва груза.
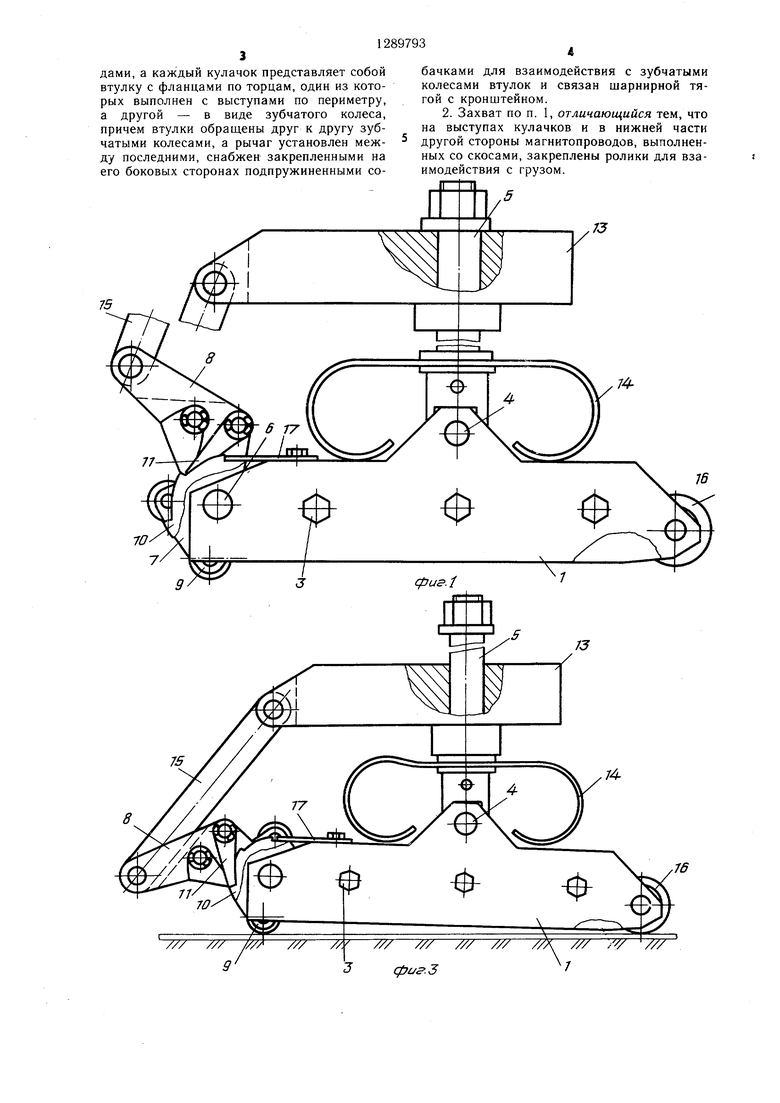
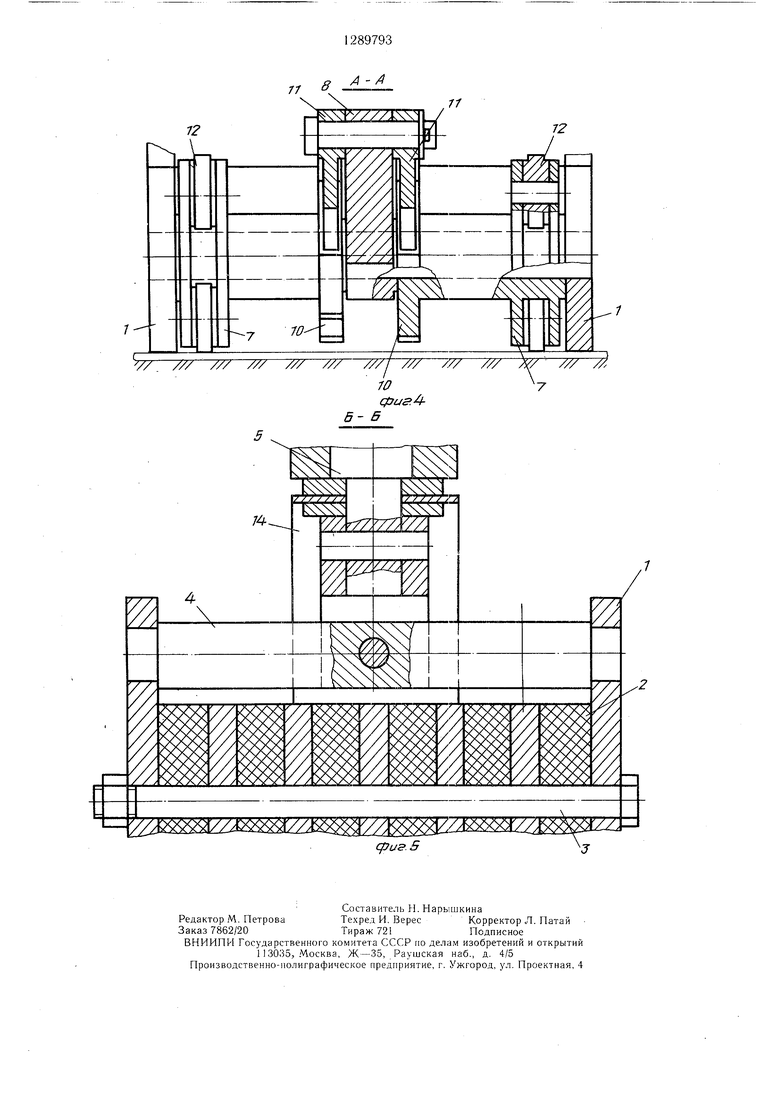
На фиг. 1 показан захват в момент опускания на груз; на фиг. 2 - то же, в момент подъема с грузом; на фиг. 3 - то же, в момент отрыва от груза; на фиг. 4 - сечение на фиг. 2; на ф|иг. 5 -- сечение Б-Б на фиг. 2.
Захват содержит пакет из чередующихся магнитопроводов 1 и магнитов 2, выполненных с отверстиями, в которых установлены стяжки 3. Пакет посредством оси 4 закреплен на элементе 5 для присоединения к грузоподъемному механизму.
На одной стороне пакета установлен механизм отрыва, который включает жестко закрепленные на оси 6 кулачки 7 и рычаг 8, при этом каждый кулачок 7 представляет собой втулку с фланцами ПО торцам, один из которых выполнен с выступами 9 по периметру, а другой - в виде зубчатого колеса 10, причем втулки обращены друг к другу зубчатыми колесами 10, а рычаг 8 установлен между ними.
На боковых сторонах рычага 8 закреплены подпружиненные собачки 11. На выступах 9 кулачков 7 закреплены ролики 12. Кроме того, захват снабжен подвижным кронщтейном 13, охватывающим элемент 5 пластинчатой пружиной .14, закрепленной симметрично относительно элемента 5 в нижней его части. Кронштейн 13 связан с рычагом 8 щарнирной пластинчатой тягой 15, а в нижней части другой стороны магнитопроводов 1, выполненных со скосами, закреплены ролики 16, при этом на магнито- проводах 1 закреплены пластинчатые пружины 17.
Захват работает следующим образом. При опускании на груз один из выступов кулачка 7 выходит за нижний габарит магнитопроводов 1, пружины 17 упираются в зубья колес 10, головки подпружиненных собачек 11 располагаются во впадинах зубчатых колес 10. Нижние то.рцы магнитопроводов 1 - рабочая поверхность захвата - посредством воздействия пружины 14 на их верхние торцы удерживаются в горизонтальном положении. Касание захвата поднимаемого груза происходит вначале роликами 12 кулачка 7 захвата, а затем роликами 16 с одновременной деформацией пружины 14. После этого начинается перемещение кронщтейна 13 вниз относительно неподвижного элемента 5 захвата. Под воздействием тяги 15 перемещается поворотный рычаг 8 (против часовой стрелки) и воздействием подпружиненных собачек 11 поворачивает зубчатые колеса 10 вместе с кулачками 7 на угол 0,25л радиан.
Наличие роликов 12 на выступах 9 кулачков 7 и роли ков 16 способствует умень
5
щению величины сил сопротивления, возникающих при горизонтальном перемещении элементов захвата по поверхности груза.
В момент окончания опускания кронщтейна 13 выступы 9 с роликами 12 кулачка 7 располагаются в пределах нижнего габарита рабочей поверхности захвата, и груз захватывается.
При подъеме кронштейна 3 происходит поворот рычага 8 в обратном направлении на угол 0,25я радиан, при этом головки подпружиненных собачек 11 перескакивают через зубцы колес 10. В момент, когда кронштейн 13 останавливается, начинается подъем груза.
При опускании груза после сонрикос- новения с опорной поверхностью происходит перемещение кронштейна 13 с тягой 15 вниз относительно элемента 5.
Под воздействием тяги 15 перемещается рычаг 8 (против часовой стрелки) и воздей- 0 ствием подпружиненный собачек 11 поворачивает колеса 10 вместе с кулачками 7 на угол 0,25я радиан. В момент окончания опускания кронщтейна 13 один из выступов 9 кулачков 7 располагается за нижним габаритом магнитопроводов 1 и отрывает захват от груза. Выступ 9 кулачка 7 при этом не доходит до своего крайнего нижнего положения, поэтому при подъеме кронщтей- на 13 кулачки 7 с колесами 10 повернутся в обратном направлении (по часовой стрелке) до момента упора зубьями колес 10 в пружинь 17.
При дальнейщем подъеме кронщтейна 13 происхо; ;ит поворот рычага 8 Б обратном (по часовой стрелке) направлении на угол 0,25я радиан, при этом головки подпружиненных собачек И перескакивают, через зубцы колес 10. В момент, когда кронштейн 13 останавливается, начинается подъем захвата без груза, при этом пружина 14 выправит рабочую поверхность захвата в горизонтальное положение, захват готов для подъема следующего груза.
Формула изобретения
Захват, содержащий пакет из чередую- ашхся магнитов и магнитопроводов с отверстиями, в которых установлены стяжки, Элемент для присоединения к грузоподъемному механизму, закрепленный посредством оси на магнитопроводах, и механизм отрыва, включающий жестко закрепленные на общей оси на одной стороне магнитопроводов кулачки и рычаг, отличающийся тем, что, с 0 целью повыщения производительности труда путем автоматизации процесса отрыва груза, он снабжен подвижным в вертикальной плоскости и охватывающим элемент для присоединения к грузоподъемному механизму кронщтейном и пластинчатой пру- 5 жиной, закрепленной симметрично относительно элемента для присоединения к грузоподьемному механизму в нижней его части для взаимодействия с магнитопрово0
5
0
5
дами, а каждый кулачок представляет собой втулку с фланцами по торцам, один из которых выполнен с выступами по периметру, а другой - в виде зубчатого колеса, причем втулки обращены друг к другу зубчатыми колесами, а рычаг установлен между последними, снабжен закрепленными на его боковых сторонах подпружиненными собачками для взаимодействия с зубчатыми колесами втулок и связан шарнирной тягой с кронштейном.
2. Захват по п. 1, отличающийся тем, что на выступах кулачков и в нижней части другой стороны магнитопроводов, выполненных со скосами, закреплены ролики для взаимодействия с грузом.
/7/
/77 / 9
/5Г
777 777
77,
777 / У
777
А72
фиг4cpus.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1988 |
|
SU1643401A1 |
| Автомат для обмотки роторов электрических машин | 1972 |
|
SU540582A3 |
| Станок для теплой сборки и разборки деталей | 1975 |
|
SU556023A1 |
| ЯАТГ.-Т-.Т ТЕХ№ ;:i-,^БИБЛИОТГКЛ | 1966 |
|
SU188912A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| МАШИНА ДЛЯ ОЧИСТКИ МЕШКОВ | 1969 |
|
SU234343A1 |
| АППАРАТ К ПОСАДОЧНЫМ МАШИНАМ ДЛЯ ПОДАЧИ СЕЯНЦЕВ В ПОСАДОЧНУЮ БОРОЗДУ | 1965 |
|
SU174874A1 |
| Контейнер | 1979 |
|
SU854816A1 |
| Автоматическое приспособление для включения в работу и выключения бортовых и узорных деккеров на коттон-машинах | 1948 |
|
SU94417A3 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
Изобретение относится к захватам. Цель изобретения - повышение производительности труда путем автоматизации процесса отрыва груза. Захват содержит пакет из магнитопроводов 1 и магнитов 2 с отверстиями, в которых установлены стяжки 3. Посредством оси 4 пакет закреплен на элементе 5 для присоединения к грузоподъемному механизму. На одной из сторон пакета установлен механизм отрыва, включающий закрепленные на оси 6 кулачки 7 и рычаг 8. Каждый кулачок 7 представляет собой втулку с фланцами по торцам, один из которых выполнен с выступами 9, а другой - в виде зубчатого колеса 10. Втулки обращены друг к другу зубчатыми ко15. лесами 10, а рычаг 8 установлен между ними и снабжен собачками 11. На выступах 9 кулачков 7 закреплены ролики. На элементе 5 установлен охватывающий его подвижный кронштейн 13, а в нижней части элемента 5 закреплена пружина 14, при этом кронштейн 13 связан шарнирной тягой 15 с рычагом 8. При опускании захвата на груз выступ 9 кулачка 7 выходит за магнитопроводы 1, собачки 11 располагаются во впадинах зубчатых колес 10, а пружина 14 удерживают магнитопроводы 1 в горизонтальном положении. После касания захвата груза начинается перемещение вниз кронштейна 13, под действием тяги 15 рычаг 8 посредством собачек 11 поворачивает зубчатые колеса 10 с кулачками 7 таким образом, что их выступы 9 не выходят за магнитопроводы 1, после чего груз захватывается. При подъеме груза происходит подъем кронштейна 13. Для освобождения устройства от груза кронштейн 13 перемещается вниз, под действием тяги 15 поворачивает рычаг 8, который собачками 11 поворачивает в свою очередь колеса 10 с кулачками 7 так, что выступ 9 выходит за магнитопроводы 1 и отрывает груз от захвата. 1 з.п. ф-лы , 5 ил. 0 i (Л ю 00 ;о со (U) /// /// vify// луW ff/ If w w Фиг. 2
Составитель Н. Нарышкина
Редактор М. ПетроваТехред И. ВересКорректор Л Патай
Заказ 7862/20Тираж 721Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Магнитный захват | 1982 |
|
SU1036658A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
