1
(21)4474201/11
(22) 05.07.88
(46) 23,04.91. Бюл. №15
(71)Ленинградский филиал Проектно-техно- логического института Энергомонтажпро- ект
(72)М.С.Казаков (53)621.86.061(088.8)
(56)Авторское свидетельство СССР Мг 1289793, ил. В 66 С 1/04, 1985.
(54) ЗАХВАТ
(57)Изобретение относится к захватам для перемещения листового проката в горизонтальном положении. Цель изобретения - расширение технических возможностей путем обеспечения автоматизации перемещения листового проката широкого диапазона толщин при нестабильном вертикальном перемещении захвата. Для этой цели элемент для присоединения к грузоподъемному механизму выполнен составным в виде звеньев цепи и шарнирно закреплен на подвижной относительно захвата траверсе 13, пластинчатая пружина 15 выполнена в виде угольника, нижняя горизонтальная часть которого закреплена на свободной стороне магнитолроводов 1, а вертикальная часть, выступающая за габарит магнитопроводов, жестко связана горизонтальной тягой 16 с аналогичной пружиной другого захвата. При этом горизонтальная тяга снабжена вертикальным штоком 17, взаимодействующим с роликами 18 К нижней поверхности чередующихся магнитов 2 присоединена накладка 19 из ферромагнитного материала, выступающая за габарит магнитопроводов. Траверса захвата снабжена ограничителями вертикального перемещения вниз в виде симметрично расположенных относительно ее продольной оси упоров 20. 1 з.п.ф-лы, 5 ил
I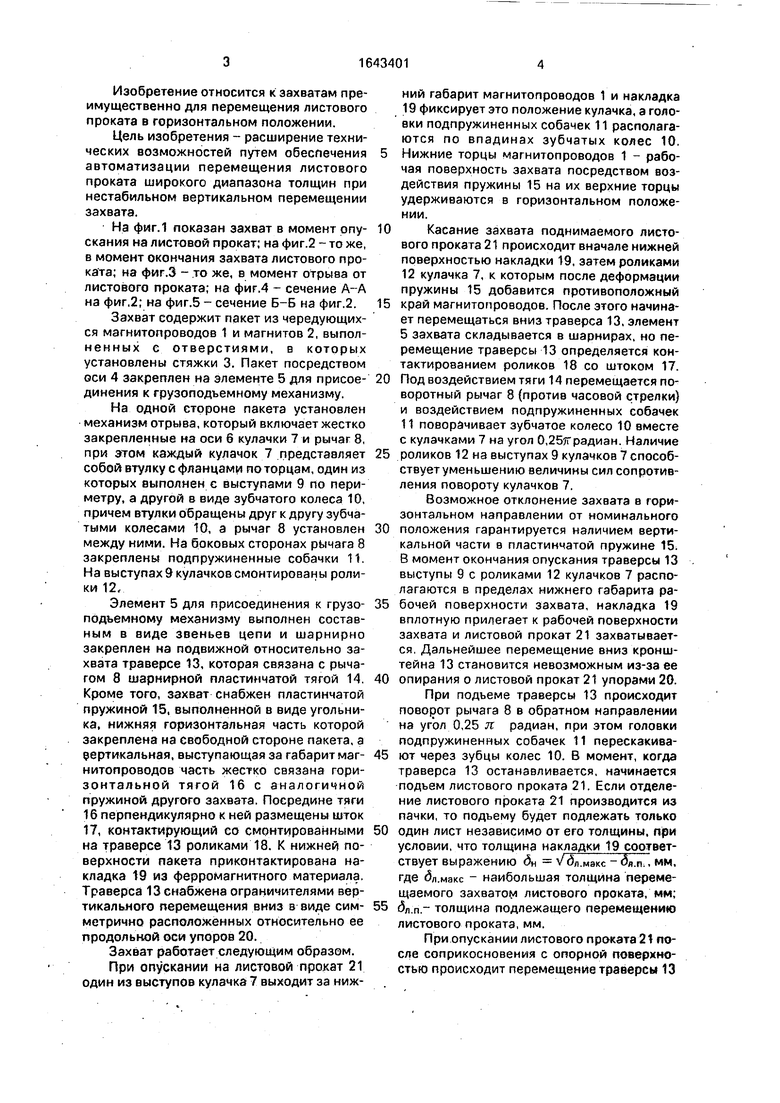
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1985 |
|
SU1289793A1 |
| Захват | 1987 |
|
SU1463685A1 |
| Автомат для обмотки роторов электрических машин | 1972 |
|
SU540582A3 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611834A2 |
| Лесопосадочная машина | 1987 |
|
SU1463163A1 |
| Станок для теплой сборки и разборки деталей | 1975 |
|
SU556023A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Механизированная линия резки листового проката | 1979 |
|
SU946823A1 |
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |
| Станок для шихтовки и сборки пакетов магнитопроводов статоров электрических машин | 1971 |
|
SU555512A1 |

623
Фиг 7
Изобретение относится к захватам преимущественно для перемещения листового проката в горизонтальном положении.
Цель изобретения - расширение технических возможностей путем обеспечения автоматизации перемещения листового проката широкого диапазона толщин при нестабильном вертикальном перемещении захвата.
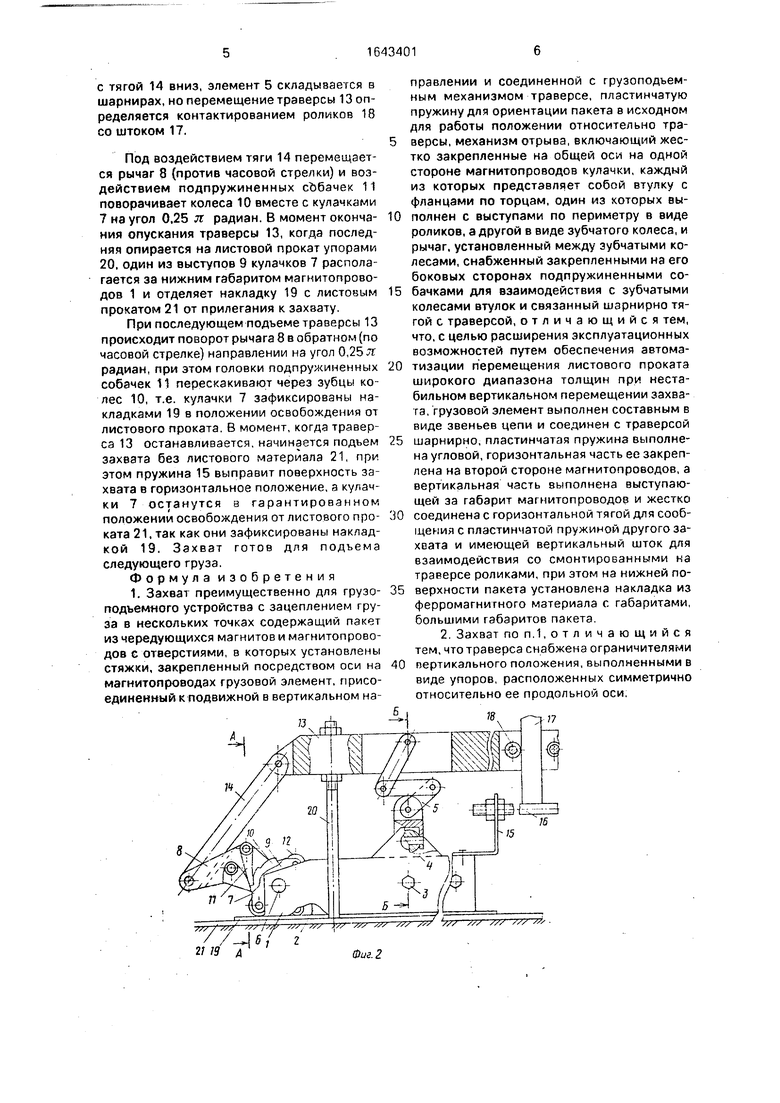
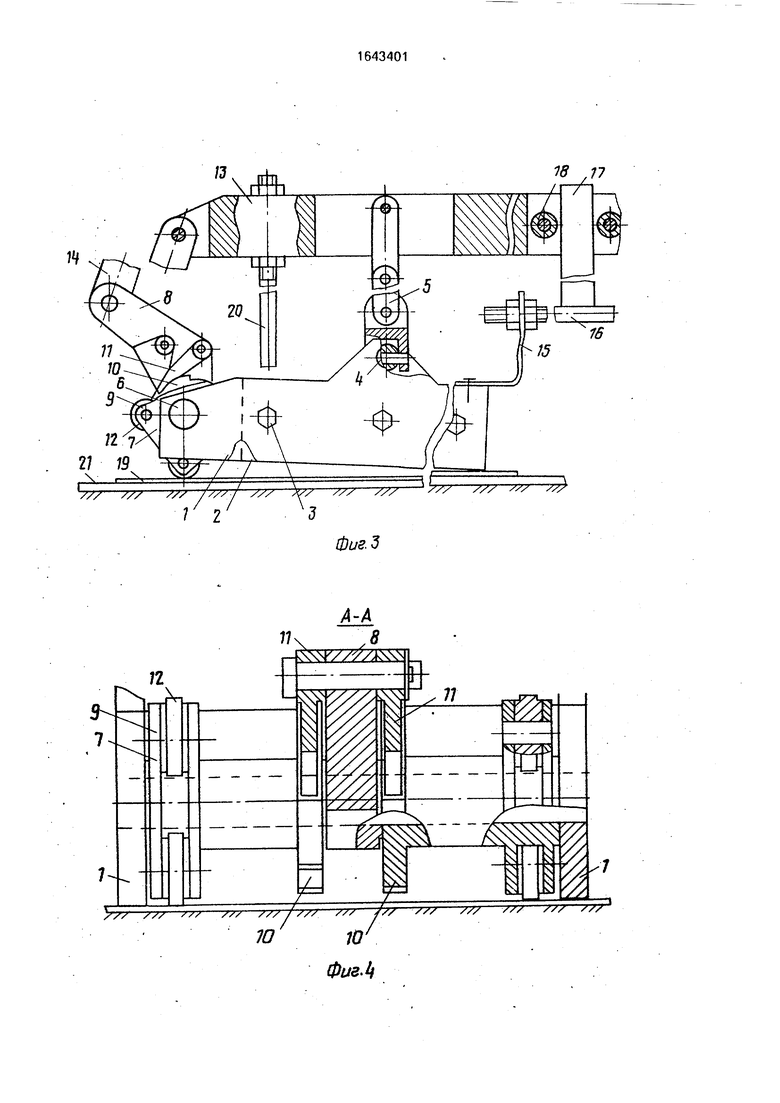
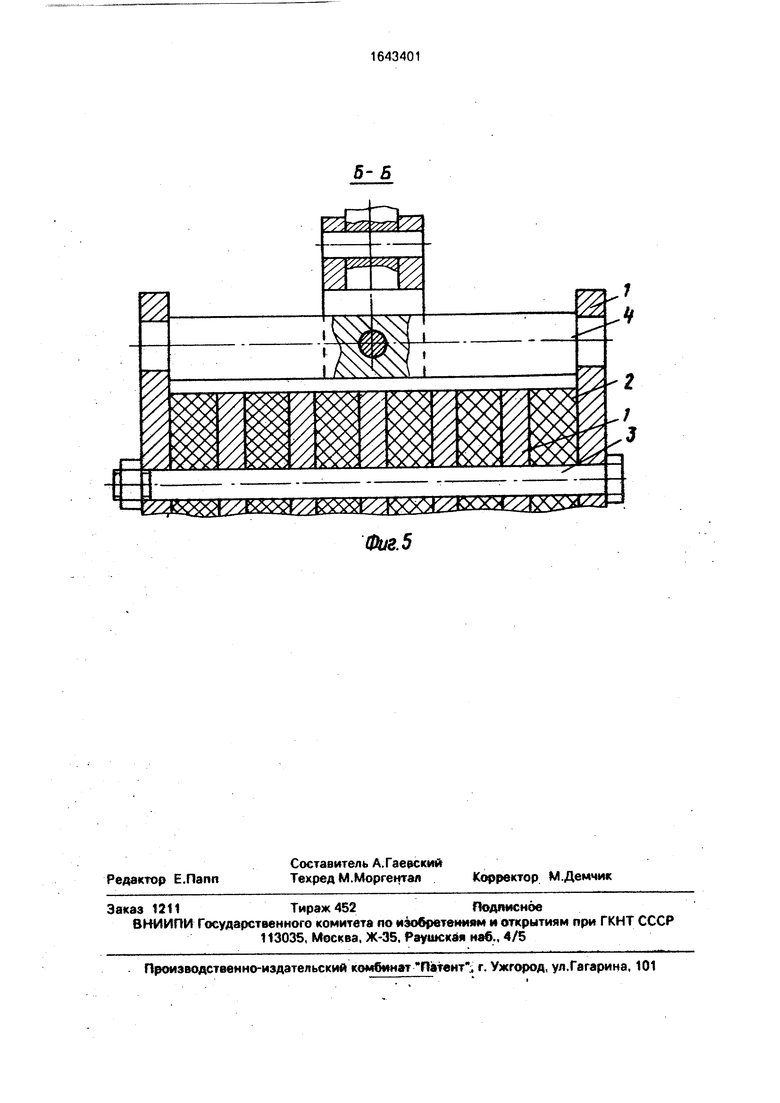
На фиг.1 показан захват в момент опускания на листовой прокат; на фиг.2 - то же, в момент окончания захвата листового проката; на фиг.З - то же, в момент отрыва от листового проката; на фиг.4 - сечение А-А на фиг,2; на фиг.5 - сечение Б-Б на фиг.2.
Захват содержит пакет из чередующихся магнитопроводов 1 и магнитов 2, выполненных с отверстиями, в которых установлены стяжки 3. Пакет посредством оси 4 закреплен на элементе 5 для присоединения к грузоподъемному механизму.
На одной стороне пакета установлен механизм отрыва, который включает жестко закрепленные на оси б кулачки 7 и рычаг 8, при этом каждый кулачок 7 представляет собой втулку с фланцами по торцам, один из которых выполнен с выступами 9 по периметру, а другой в виде зубчатого колеса 10, причем втулки обращены друг к другу зубчатыми колесами 10, а рычаг 8 установлен между ними. На боковых сторонах рычага 8 закреплены подпружиненные собачки 11. На выступах 9 кулачков смонтированы ролики 12,
Элемент 5 для присоединения к грузоподъемному механизму выполнен составным в виде звеньев цепи и шарнирно закреплен на подвижной относительно захвата траверсе 13, которая связана с рычагом 8 шарнирной пластинчатой тягой 14. Кроме того, захват снабжен пластинчатой пружиной 15, выполненной в виде угольника, нижняя горизонтальная часть которой закреплена на свободной стороне пакета, а вертикальная, выступающая за габарит магнитопроводов часть жестко связана горизонтальной тягой 16 с аналогичной пружиной другого захвата. Посредине тяги 16 перпендикулярно к ней размещены шток 17, контактирующий со смонтированными на траверсе 13 роликами 18. К нижней поверхности пакета приконтактирована накладка 19 из ферромагнитного материала. Траверса 13 снабжена ограничителями вертикального перемещений вниз в виде симметрично расположенных относительно ее продольной оси упоров 20.
Захват работает следующим образом.
При опускании на листовой прокат 21 один из выступов кулачка 7 выходит за нижний габарит магнитопроводов 1 и накладка 19 фиксирует это положение кулачка, а головки подпружиненных собачек 11 располагаются по впадинах зубчатых колес 10.
Нижние торцы магнитопроводов 1 - рабочая поверхность захвата посредством воздействия пружины 15 на их верхние торцы удерживаются в горизонтальном положении.
Касание захвата поднимаемого листового проката 21 происходит вначале нижней поверхностью накладки 19, затем роликами 12 кулачка 7, к которым после деформации пружины 15 добавится противоположный
край магнитопроводов. После этого начинает перемещаться вниз траверса 13, элемент 5 захвата складывается в шарнирах, но перемещение траверсы 13 определяется контактированием роликов 18 со штоком 17.
Под воздействием тяги 14 перемещается поворотный рычаг 8 (против часовой стрелки) и воздействием подпружиненных собачек 11 поворачивает зубчатое колесо 10 вместе с кулачками 7 на угол 0,25jrрадиан. Наличие
роликов 12 на выступах 9 кулачков 7 способствует уменьшению величины сил сопротивления повороту кулачков 7.
Возможное отклонение захвата в горизонтальном направлении от номинального
положения гарантируется наличием вертикальной части в пластинчатой пружине 15. В момент окончания опускания траверсы 13 выступы 9 с роликами 12 кулачков 7 располагаются в пределах нижнего габарита рабочей поверхности захвата, накладка 19 вплотную прилегает к рабочей поверхности захвата и листовой прокат 21 захватывается Дальнейшее перемещение вниз кронштейна 13 становится невозможным из-за ее
опирания о листовой прокат 21 упорами 20.
При подъеме траверсы 13 происходит
поворот рычага 8 в обратном направлении
на угол 0,25 л радиан, при этом головки
подпружиненных собачек 11 перескакивают через зубцы колес 10. В момент, когда траверса 13 останавливается, начинается подъем листового проката 21. Если отделение листового проката 21 производится из пачки, то подъему будет подлежать только
один лист независимо от его толщины, при условии, что толщина накладки 19 соответ- ствует выражению д V дл мэкс - 5я.п мм, где Йл.макс - наибольшая толщина перемещаемого захватом листового проката, мм;
(5Л п.- толщина подлежащего перемещению листового проката, мм.
При опускании листового проката 21 после соприкосновения с опорной поверхностью происходит перемещение траверсы 13
с тягой 14 вниз, элемент 5 складывается в шарнирах, но перемещение траверсы 13 определяется контактированием роликов 18 со штоком 17.
Под воздействием тяги 14 перемещается рычаг 8 (против часовой стрелки) и воздействием подпружиненных собачек 11 поворачивает колеса 10 вместе с кулачками 7 на угол 0,25 л радиан. В момент окончания опускания траверсы 13, когда послед- HHq опирается на листовой прокат упорами 20, один из выступов 9 кулачков 7 располагается за нижним габаритом магнитопрово- дов 1 и отделяет накладку 19 с листовым прокатом 21 от прилегания к захвату
При последующем подъеме траверсы 13 происходит поворот рычага 8 в обратном (по часовой стрелке) направлении на угол 0,25л радиан, при этом головки подпружиненных собачек 11 перескакивают через зубцы колес 10, т.е. кулачки 7 зафиксированы накладками 19 в положении освобождения от листового проката В момент, когда траверса 13 останавливается, начинается подъем захвата без листового материала 21, при этом пружина 15 выправит поверхность захвата в горизонтальное положение, а кулачки 7 останутся в гарантированном положении освобождения от листового проката 21, так как они зафиксированы накладкой 19. Захват готов для подъема следующего груза.
Формула изобретения 1. Захват преимущественно для грузоподъемного устройства с зацеплением груза в нескольких точках содержащий пакет из чередующихся магнитов и магнитопрово- дов с отверстиями, в которых установлены стяжки, закрепленный посредством оси на магнитопроводах грузовой элемент, присоединенный к подвижной в вертикальном на2П9 А
10
правлении и соединенной с грузоподъемным механизмом траверсе, пластинчатую пружину для ориентации пакета в исходном для работы положении относительно траверсы, механизм отрыва, включающий жестко закрепленные на общей оси на одной стороне магнитопроводов кулачки, каждый из которых представляет собой втулку с фланцами по торцам, один из которых выполнен с выступами по периметру в виде роликов, а другой в виде зубчатого колеса, и рычаг, установленный между зубчатыми колесами, снабженный закрепленными на его боковых сторонах подпружиненными со- 15 бачками для взаимодействия с зубчатыми колесами втулок и связанный шзрнирно тягой с траверсой, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения автоматизации перемещения листового проката широкого диапазона толщин при нестабильном вертикальном перемещении захвата, грузовой элемент выполнен составным в виде звеньев цепи и соединен с траверсой шарнирно, пластинчатая пружина выполнена угловой, горизонтальная часть ее закреплена на второй стороне магнитопроводов, а вертикальная часть выполнена выступающей за габарит магнитопроводов и жестко соединена с горизонтальной тягой для сообщения с пластинчатой пружиной другого захвата и имеющей вертикальный шток для взаимодействия со смонтированными на траверсе роликами, при этом на нижней поверхности пакета установлена накладка из ферромагнитного материала с габаритами, большими габаритов пакета
2 Захват по п1,отличающийся тем, чтотраверса снабжена ограничителями вертикального положения, выполненными в виде упоров расположенных симметрично относительно ее продольной оси
0
5
5
0
Фиг 2
Фиг.З
11
Фиг.Ь
/// Х/Х /77
Фиг.5
