Изобретение относится к горной про а гашенности и может быть использовано при работе канатных угольных пил.
Цель изобретения - повышение надежности работы привода.
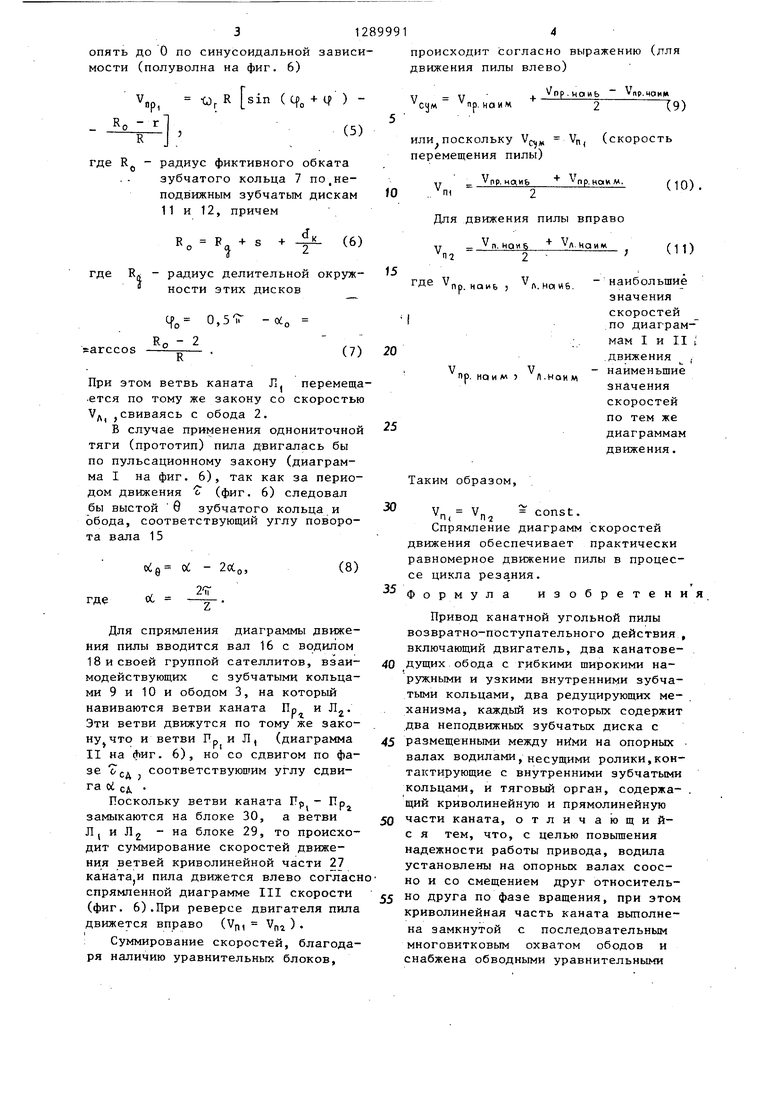
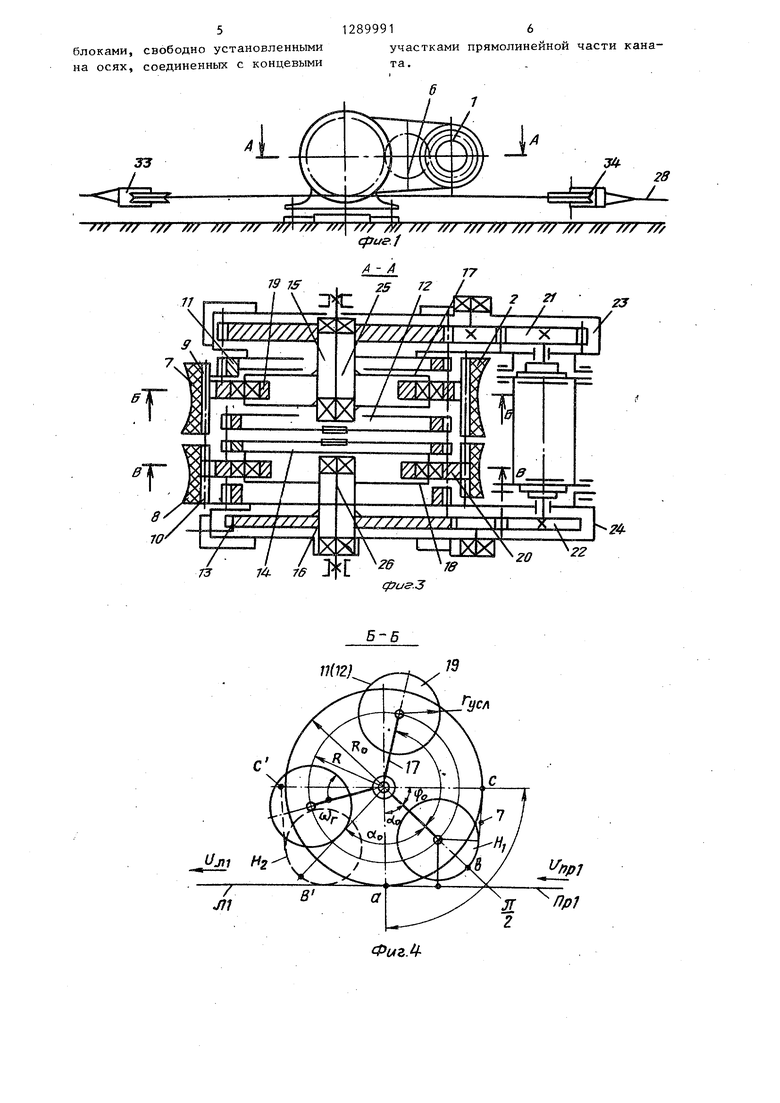
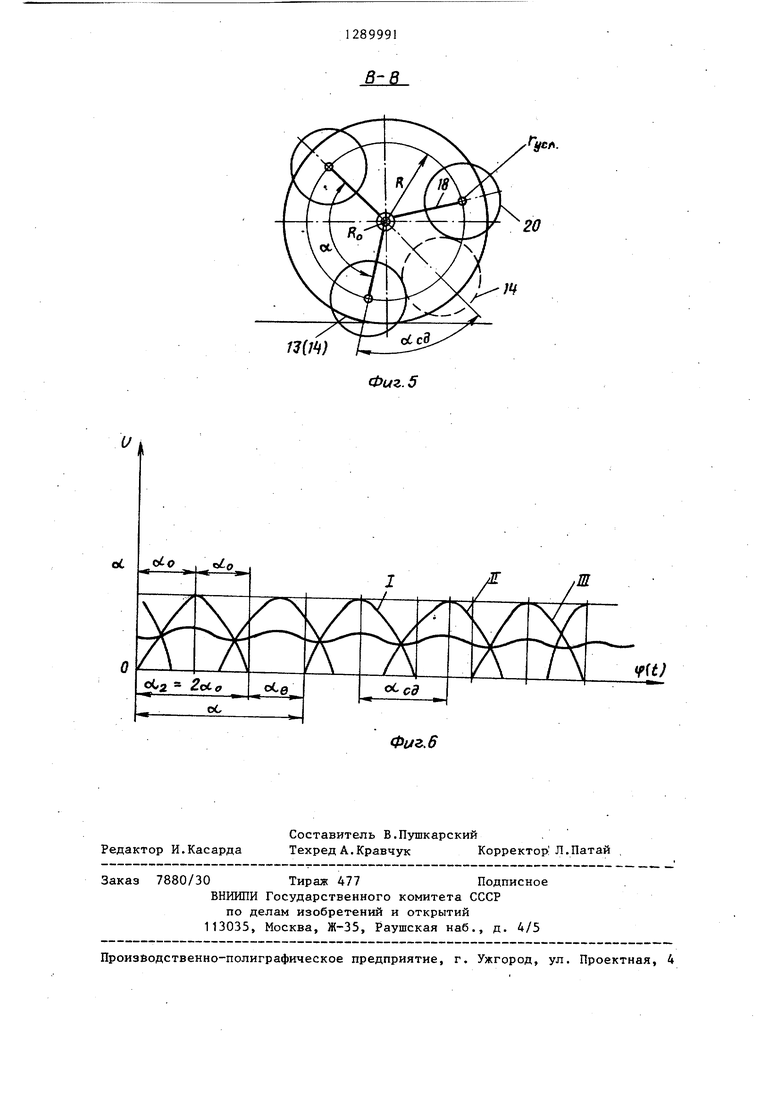
На фиг. 1 изображена принципиальная схема привода;.на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 3; на фиг. 6 - диаграммы линейных скоростей V в функции угла поворота водил или времени t.
Привод состоит из двигателя 1 с командоаппаратом, двух канатове- дущих ободов 2 и 3, двух редуцирующих механизмов 4 и 5 и тягового
органа 6(фиг. 1 и 2). Канатоведу- щие ободы снабжены гибкими наружными широкими кольцами 7 и 8 и узкими внутренними зубчатыми кольцами 9 и 10.
Каждый из редуцирующих механизмов 4 и 5 содержит по два неподвижных зубчатых диска 11-14 с размещенными между ними на опорных полых валах 15 и 16 водилами 17 и 18 с роликами 19 и 20. Валы 15 и 16 кинематически связаны с двигателем 1 рядовыми зубчатыми передачами 21 и 22, заключенными в картеры 23 и 24. Зубчатые диски 11и 13 жестко закреплены на картерах, а диски 12 и 14 - на неподвижных полуосях 25 и 26, служащих опорами для валов 15 и 16. Зубчатые диски имеют на 1-2 зуба меньше, чем наружные зубчатые кольца.
Тяговый орган 6 состоит из криволинейной 27 и прямолинейной 28 частей каната (фиг. 2). Криволинейная часть каната выполнена замкнутой с последовательным многовитковым охватом ободов и снабжена обводными уравнительными блоками 29 и 30, свободно установленными на. осях 31 и 32, соединенных с концевыми участками пр гмолииейной части 28 каната замками 33 и 34 (фиг. 2).
Канатоведущие ободы имеют гиперболическую форму наружной поверхности для центрирования охватывающих их витков каната.
Каждая группа роликов во;;,ила состо- ,ит и-з трех роликов 19 и 20,равномерно размещенных по окружности центров радиусом R; причем ролики одной группы сдвинуты по отношению к
12899912
сателлитам другой группы по фазе вращения на угол (фиг. 4 и 5)
. . ci
где об - угол между соседними ро ками группы роликов
ОС
Ш
с
J
Z
15
20
где Z - число сателлитов в каждо группе.
Привод работает следующим обра зом.
При включении от командоаппара двигателя 1 по часовой стрелке с ловой частотой СО дд через рядовую зубчатую передачу 21 получает в щение по часовой стрелке опорный 15 и водило 17 с угловой частотой
25
СОг
Q
Ав
и
21
где и
30
35
40
J,, - передаточное число пере чи 21.
В положении, изображенном на фиг. 4, ролик Н из группы ролик 19 по своему условному радиусу г разует гофр ; аЬс по рабочему ко туру зубчатого кольца 7, приведен му к радиусу навивки каната на о 2, так что
IjCd
г + S
где г
S
45
-радиус окружности ролик
-расстояние от внутренне окружности внутреннего чатого кольца до точки вивки каната на обод;
d| - диаметр каната. При дальнейшем вращении опорно вала 15 на угол по часовой стрелке гофр аЬс кольца 7 перем
ется в положение та П
аЬ
Ветвь ка
р за счет фрикционной связи 50 ободом перемещается влево на вели ну
д S abc - ас, 55 навиваясь на обод 2 (фиг. 4).
В пределах угла поворота вала 0(Lo Ч 6 2(д линейная скорость ната изменяется от Q до максимума
. . ci
(1)
где об - угол между соседними роликами группы роликов
ОС
Ш
(2)
с
J
Z
где Z - число сателлитов в каждой группе.
Привод работает следующим образом.
При включении от командоаппарата двигателя 1 по часовой стрелке с угловой частотой СО дд через рядовую зубчатую передачу 21 получает вращение по часовой стрелке опорный вал 15 и водило 17 с угловой частотой
СОг
Q
Ав
и
21
где и
30
35
J,, - передаточное число передачи 21.
В положении, изображенном на фиг. 4, ролик Н из группы роликов 19 по своему условному радиусу г образует гофр ; аЬс по рабочему контуру зубчатого кольца 7, приведенному к радиусу навивки каната на обод 2, так что
IjCd
г + S
(3)
0
где г
S
5
-радиус окружности ролика;
-расстояние от внутренней окружности внутреннего зубчатого кольца до точки навивки каната на обод;
d| - диаметр каната. При дальнейшем вращении опорного вала 15 на угол по часовой стрелке гофр аЬс кольца 7 перемещается в положение та П
аЬ
Ветвь канар за счет фрикционной связи с 0 ободом перемещается влево на величи- ну
д S abc - ас, 55 навиваясь на обод 2 (фиг. 4).
(А)
В пределах угла поворота вала 15 0(Lo Ч 6 2(д линейная скорость каната изменяется от Q до максимума и
3128999
до о по синусоидальной зависи(полуволна на фиг. 6)
пр, sin (q) + )
(5)
R - радиус фиктивного обката зубчатого кольца 7 по,неподвижным зубчатым дискам О 11 и 12, причем
R Р + S -Ь А- (6)
ЕЛ - радиус делительной окруж- -5 ° ности этих дисков
0,5Г -(o
sarccos
RO - 2
(7) 20
При этом ветвь каната Л перемеща- .ется по тому же закону со скоростью V. .свиваясь с обода 2.
В случае применения однониточной тяги (прототип) пила двигалась бы по пульсационному закону (диаграмма I на фиг. 6), так как за периодом движения ь (фиг. 6) следовал
бы выстой 0 зубчатого кольца и обода, соответствующий углу поворота вала 15
«;Q «; - 2о(,о,
(8)
ОС
Z
Для спрямления диаграммы движения пилы вводится вал 16 с водилом 18 и своей группой сателлитов, взаи- модействующих с зубчатыми кольцами 9 и 10 и ободом 3, на который навиваются ветви каната По и Л. Эти ветви движутся по тому же закону что и ветви Пр и Л, (диаграмма II на фиг. 6), но со сдвигом по фазе Тед соответствующим углу сдвига od СА
Поскольку ветви каната Пр - Пр замыкаются на блоке 30, а ветви Л, и Л2 - на блоке 29, то происходит суммирование скоростей движения ветвей криволинейной части 27 каната и пила движется влево соглас спрямленной диаграмме III скорости (фиг. 6).При реверсе двигателя пила движется вправо (V, V).
Суммирование скоростей, благодаря наличию уравнительных блоков.
14
происходит согласно выражению (для движения пилы влево)
.. . .ноиь Упр.моин сум пр.наим 2 (9)
или поскольку V Vn, (скорость перемещения пилы)
УПР. HOkMb пр.
каи м.
2 движения пилы вправо
П.НОИб Л-НОИЦ
2 ;
(10).
(11)
V „„,, , V,,,, - наибольшие
значения скоростей
по диаграммам I и II .движения ,
У„ V - наименьшие пр. НОИ м л .Нои м
значения
скоростей по тем же диаграммам движения.
м образом,
V V
П( П-2
const.
Спрямление диаграмм скоростей движения обеспечивает практически равномерное движение пилы в процессе цикла реза,ния. Формула изобретения
Привод канатной угольной пилы возвратно-поступательного действия , включающий двигатель, два канатове- дущих обода с гибкими широкими наружными и узкими внутренними зубчатыми кольцами, два редуцирующих механизма, каждый из которых содержит два неподвижных зубчатых диска с размещенными между ними на опорных валах водилами, несущими ролики,контактирующие с внутренними зубчатыми кольцами, и тяговый орган, содержа- . щий криволинейную и прямолинейную части каната, отличающий- с я тем, что, с целью повьшения надежности работы привода, водила установлены на опорньсх валах соос- но и со смещением друг относительно друга по фазе вращения, при этом криволинейная часть каната выполнена замкнутой с последовательным многовитковым охватом ободов и снабжена обводными уравнительными
512899916
блоками, свободно установленными участками прямолинейной части кана- на осях, соединенных с концевыми
та.
учас
та.
33
707
73 74 7ff
24.
7ff
20
22
фис-.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод канатной угольной пилы | 1979 |
|
SU883406A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| Привод резания камнерезной машины | 1985 |
|
SU1357243A1 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1984 |
|
SU1239043A1 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| Устройство для измельчения сыпучих материалов | 1985 |
|
SU1296214A1 |
| Привод канатно-цепных пил | 1978 |
|
SU796418A1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| Привод подъемника | 1981 |
|
SU992379A1 |
| УСТРОЙСТВО РАЗМАТЫВАНИЯ ЛЕНТЫ И МАШИНА ТИСНЕНИЯ ЭЛЕМЕНТОВ В ВИДЕ ЛИСТОВ | 2019 |
|
RU2758611C1 |
Изобретение относится к горной промьшшенности, предназначено для использования при работе канатных угольных пил и повьшает надежность работы привода. Для этого он вьтол- нен из двигателя 1, двух канатове- дущих ободов 2 и 3, двух редуцирующих механизмов 4 и 5 и тягового органа. Каждый редуцирующий механизм 4 и 5 содержит неподвижные зубчатые диски и размещенные между ними на опорных валах водила с роликами.Тяговый орган состоит из криволинейной 27 и прямолинейной 28 частей каната. Криволинейная часть каната выполне- . на замкнутой с последовательным много- витковым охватом ободов и имеет уравнительные блоки 29 и 30. Последние установлены на осях 31 и 32,соединенных с концевыми участками прямолинейной части 28 каната замками 33 и 34, При замыкании ветвей каната на уравнительных блоках 29 и 30 происходит суммирование скоростей движения криволинейной части 27 каната и пила движется влево. При реверсе двигателя 1 пила движется вправо. 6 ил. (Л 7S ffrru/re 00 со ;о со 3 фиё-.2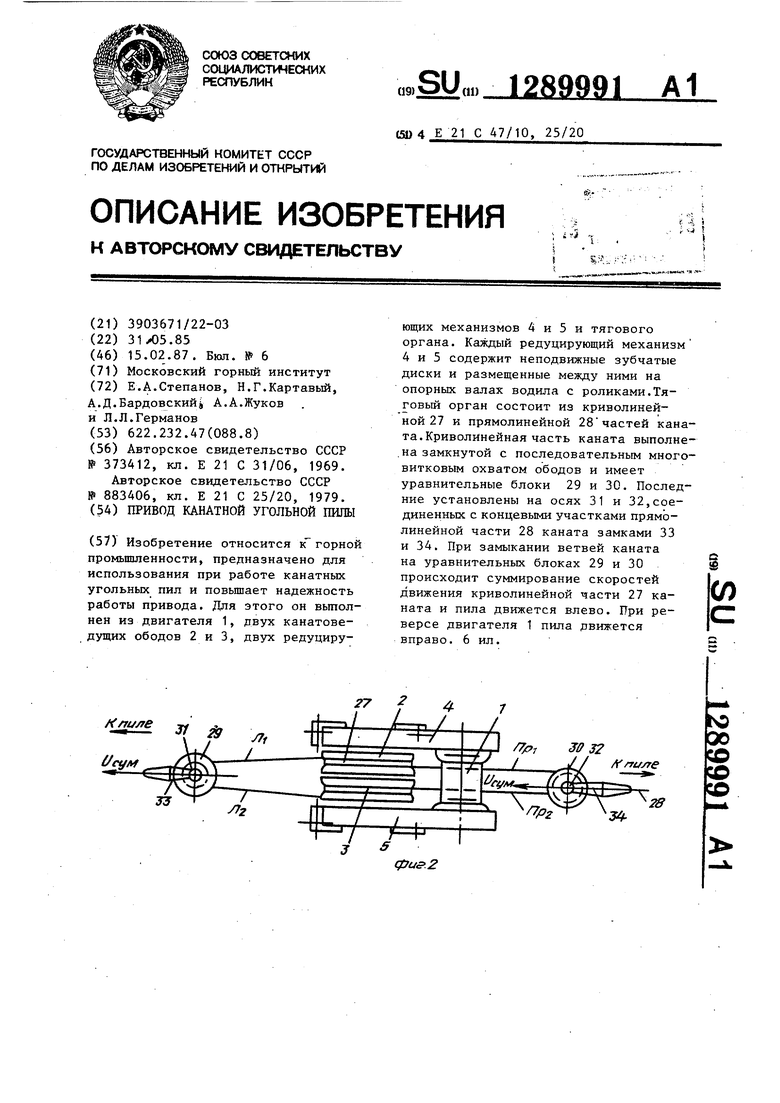
1Ю2).
С
ФигЛ
В-В
20
т
Фиг. 5
т
Редактор И.Касарда
Составитель В.Пушкарский
Техред А. Кравчук Корректор Л. Патай
Заказ 7880/30 Тираж 477Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Произбодственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 6
| ВСЕСОН'" | 0 |
|
SU373412A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Привод канатной угольной пилы | 1979 |
|
SU883406A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
