11
Изобретение относится к автоматике и может быть использовано в станках с числовым программным управлением.
Цель изобретения - упрощение устройства и повышение точности отработки контура путем уменьшения неравномерности выходных импульсных последовательностей по осям координат.
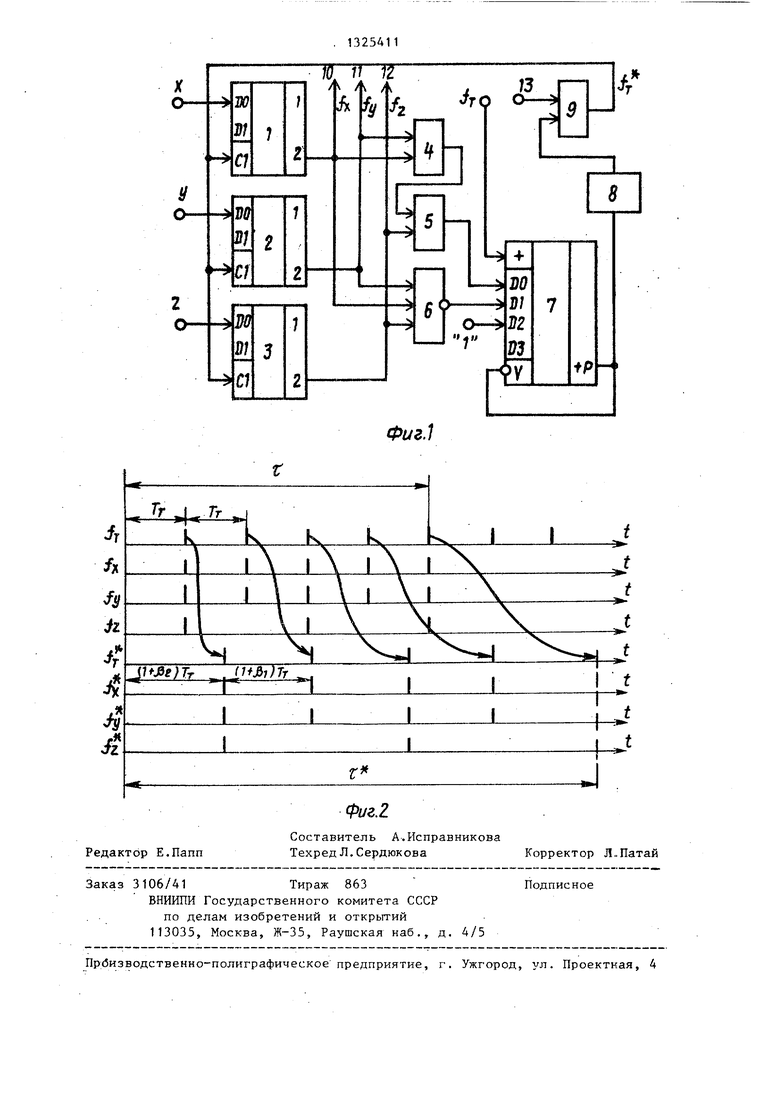
На фиг. 1 представлена схема устройства; на фиг. 2 - временная диаграммы сигналов при действии стабилизации при трехкоординатной отработке (примеры распределения выходных сигналов для различных соотношений по осям координат);на фиг. 2 - обозначено: f - тактовая частота; j,, f-J , f частота по осям X,Y,Z соот- вественно при отсутствии стабилиза- ции; fу , fY , f - то же при работе устройства для стабилизации.
Устройство содержит двухразрядные регистры 1-3 сдвигая первый А и второй 5 злементы неравнозначности, трехвходовой элемент И-НЕ 6, декадный счетчик 7 (с возможностью параллельной записи кода), элемент 8 задержки, элемент ИЛИ 9 а также выходы 10 - 12 устройства по координатам X, Y, Z соответственно, и вход 13. Входы DO регистров 1 - 3 являются входами устройства и соединяются с координатными выходами интерполятора X,Y,Z соответственно. Выход сложе- ния (+) счетчика 7 является входом задающей частоты и соединяется с выходом блока задания скорости интерполятора. .ВьАоды 10 - 12 устройства соединяются с входами устройств уп- равления приводами подач и входом блокировки интерполятора. Вход 13 является входом сдвига от интерполятора.
Декадный счетчик 7 совместно с элементами 4 и 5 неравнозначности и элементом И-НЕ 6,обеспечивающими запись в счетчик необходимого кода, образует делитель с переменным коэффициентом деления, выходные сигналы которого производят считывание содержимого старших разрядов координатных регистров сдвига. Так как коэффи деления счетчика зависит от значения кода, предварительно запи- санного в него по входам записи, то период выходных сигналов счетчика изменяется на каждом такте, если изменяется содержимое старших разрядов
112
регистров сдвиг а, причем выход .ые сигналы счетчика следуют равномерно при постоянном коэффициенте деления и мгновенно изменяют свой период следования при изменении коэффициента деления.
Устройство работает следующим образом.
В процессе интерполяции на входы DO регистров 1 - 3 сдвига поступают сигналы единичных приращений по координатам Х,У и Z соответственно. Эти сигналы записываются в первые разряды регистров и сдвигаются во вторые разряды регистров сигналами сдвига, поступающими из интерполятора по входу 13. Появление единичного сигнала хотя бы на одном из выходов 2 регистров 1-3 блокирует по выходам 10 - 12 работу интерполятора. Эти же сигналы через элементы 4-6 поступают на входы ВО и D1 счетчика 7. Очередной импульс переполнения с выхода +Р счетчика 7 по входу V разрешает запись кода, соответствующего содержимому старших (вторых) разрядов регистров 1 - 3 в счетчик 7 и через злементы 8 задержки и ИЛИ 9 по входам С1 сдвигает содержимое регистров 1-3. Вытесняемые при этом единицы старших разрядов регистров 1 - 3 образуют выходные сигналы на линиях 10 - 12 по осям координат X, Y, Z, вслед за чем содержимое младших разрядов регистров сдвигается в старшие разряды. Если при этом хотя бы один из старших разрядов регистров 1 - 3 устанавливается в 1, то интерполятор остается заблокированным, а схема установки кода счетчика 7 подготовлена к записи в него числа, определяющего коэффициент деления в следующем такте.Если же старшие разряды регистров 1 - 3 содержат нули, то интерполятор разблокируется и регистры 1 - 3 принимают единичные перемещения на следующие два -шага.
Возможные комбинации состояний старших разрядов регистров 1-3, отвечающие им коды записи в счетчик 7 и коэффициент деления счетчика 7 указаны в таблице.
Из таблицы видно,что в разряд D2 требуется запись при любых значающих комбинациях, в разряд D1 - во всех случаях, кроме одновременной отработ3 13
ки по трем осям (комбинация 111), в разряд DO - при перемещении по одной и трем осям. Поэтому на вход D2 подключается константа 1, вход D1 подключен к выходам регистров через элемент И-НЕ 6, на выходе которой сигнал равен нулю только при наличии трех единиц на ее входах, а вход DO - подключается через последова- тельно соединенные элементы неравнозначности. Выход элемента 4 исключает появление сигнала при наличии единиц на выходах регистров 1 и 2,выход элемента 5 неравнозначности исключа- ет появление сигнала при наличии единиць на выходе регистров 1 НЗ Г(Рг-ОУ(Рг-2)Д (РГ-З). Когда же имеются 1 на выходах всех регистров, то выход элемента 4 равен
и тогда выход элемента 5 равен
1 «и
1
Действие стабилизации основано на увеличении периода между последовательными шагами по осям в тех случаях, когда должна производиться одновременная выдача по двум или трем осям. Обозначим через f максимальную из частот йо осям, т.е. f, maxffy, fy, (для приводимого на рисунке случая f
Две другие чистоты обозначим fj и f..Введем обозначения:
-If
4
IL
ft
Причем k, ; k
-i Обозначим через
т.е.
/i и циенты увеличения периода тактовой частоты при одиовремениом перемещении по двум и трем осям соответственно
При отсутствии стабилизации время 1 отработки участка составит
t
IL Т.
где 1 - перемещение по наибольшей оси;
Т - период тактовой частоты f
(i,.i-).
Действие стабилизации сводится к тому,что время отработки участка увеличивается на величину / k Т . за счет изменения периода в случае одновременного перемещения по трем осям и на величину A(k - k) Т при одновременном перемещении по
114
двум осям.Тогда время отработки участка при действии стабилизации соста- вит:
Г 1,Т, 1 + kj + /3,(k, - ,- k l,T,Cl. + /i, k, -t- (/Jj- )k,3.
Отсюда
f
T 1 +/5, k, + (|Sj-/J,)kj
(2) Согласно (1)
f ; fj f .
Дня частот fj и f сохраняются эти же соотношения, так как они определяются интерполятором,а не действием стабилизации; Тогда
f k, ft kj.f.
(3)
25
30
Величина контурной скорости (точнее частоты, определяющей контурную скорость) равна
f ,
что с учетом (2) и (3) дает , . 1 + k5 ч- ki
35
40
к т 1 +/j k, + (fii-) V
Следовательно, коэффициент неста- .бильности контурной скорости, определенный как отношение f и f, составит
. jK, 1 ki
«« fr 1 + k, + (/5j-/,) ki
(4)
Для случая двухкоординатной отработки k О, О
V «iiZSL.
«нс(1 1 + /ь, k,
(5)
из (5) следует, что при k, О Унс(1) Поскольку О 4 k,1 (так как ff max {f, f j для двухкоор- динатного случая),то имеет смысл выбрать yj, так,чтобы при k, 1, 1. Тогда из (5) получаем
, Y2 - 1 2 0,41. Обратившись к формуле (4), устанавливаем,что при k Ц О, З ис 1. Так как О k,{ i 1; О , то потребовав,чтобы при k kj 1 . 1, получим из (4) Лг 1 i 0,73;приняв по условиям простоты реализации j 0,4 и /1 0,75, получаем
V
0 НС
11
1
ь г
JLi
0,4 k
+ kl
+ 0,35 kj
(6)
Коэффициенты /} и , равные 0,4 и О,75 соответственно, могут быть получены путем деления входной частоты устройства стабилизации на 1,4(7/5) и 1,75(7/4). В первом случае величина периода возрастает на 0,4 Т, so втором - на О,75 Т.
В схеме деления коэффициенты деления должны быть целыми числами,наименьшие целые числа, обеспечивающие соотношения 1:1,4:1,75 соответственно равны 20, 28 и 35, т.е. коэффициенты деления делителя при работе по одной, двум и трем осям соответственно должны составлять 20, 28 и 35. Такое решение потребует увеличения входной частоты блока заданий скорости в 20 раз,что неприемлемо.Если же коэффициенты ft и выбрать равными 1/3 и 2/3 соответственно , то коэффициенты деления составят 1,4/3,5/3,: что вьтолняется для целых чисел 3,4 и 5. При этом формула для нимает вид
. НС
fl
la
ч- kl
1 + 0,334 (k, -f Ц)
Реализация коэффициентов деления 3,4 и 5 осуществляется в делителе, содержащем одну тетраду, тактовая частота блока задания скорости должна быть повышена в три раза. При работе по одной оси коэффициент деления делителя равен 3. Общая длина участка отработки выбрана примерно равной 17 дискрет. Так как входная частота делителя в устройстве стабилизации повышена в 3 раза, то в идеальном случае, т.е. при з нс общее число тактовых сигналов должно составить , а количество межтактовых интервалов 50.
Разброс времени отработки лежит в пределах пяти периодов входной частоты f. счетчика 7 при общем време13254116
Неравномерность выходных импульсов умножителя (т.е. известного устройства), равна 2,причем неравномерность имеет место во всех случаях,
с когда отбор ведется более чем с одно- го разряда умножителя . В делителе с переменным коэффициентом деления, т.е. в устройстве для стабилизации,в случае неизменной уставки выходные
fO импульсы следуют равномерно. При изменении уставки происходит соответствующее изменение периода выходных импульсов, что вызывает, появление неравномерности. В устройстве величиf5 на максимальной неравномерности,соответствующая переходу от однокоор- динатного случая, к трехкоординатному, составляет 5/3 ,66,т.е. меньше, чем у известного устройства.
20 Применение устройства позволяет простыми средствами осуществлять стабилизацию контурной скорости в интерполяторах с оценочной функцией,в интерполяторах по методу 11ДА и дру- 25 гих типов с нормализацией перемеще- Гкс Р ния на участке отработки при работе по двум и трем координатам, причем благодаря улучщеншо равномерности выходов точность отработки контура
30 повьшается.
35
40
45
50
Предлагаемое устройство можно использовать в интерполяторах любых типов при условии, что процесс интер- поля51Ий ведется на постоянной частоте и величины перемещений в кадре нормализованы.
Формула изобретения
Устройство для стабилизации скорости подачи в станках с программным управлением, содержащее по числу координат три двухразрядных регистра сдвига, у которых входы установки младщих разрядов являются первыми входами устройства, о т л и ч а ю- щ е е с я тем, что, с целью упрощения устройства и повышения точности отработки контура путем уменьшения неравномерности выходных импульсных последовательностей .по осям чсоорди- нат, введены последовательно соеди- нен ные первый и второй элементы нени отработки 50 периодов (работа по одной оси), т.е. нестабильность контурной скорости не .выше 10%.
При работе по двум осям нестабильность составит (-5,2+6)% и уменьшается в 5 раз по сравн.ению с устройст- з Рэвновначности,а также трехвходовой вом, в котором стабилизация отсутст- элемент И-НЕ, декадный счетчик и вует. При работе по трем осям неста- последовательно соединенные элемент бильность уменьшается в 4 раза и задержки и эл€;мент ИЛИ, первый и составляет (-9,6-+3,8)%.второй входы первого элемента нерав5
0
5
0
Предлагаемое устройство можно использовать в интерполяторах любых типов при условии, что процесс интер- поля51Ий ведется на постоянной частоте и величины перемещений в кадре нормализованы.
Формула изобретения
Устройство для стабилизации скорости подачи в станках с программным управлением, содержащее по числу координат три двухразрядных регистра сдвига, у которых входы установки младщих разрядов являются первыми входами устройства, о т л и ч а ю- щ е е с я тем, что, с целью упрощения устройства и повышения точности отработки контура путем уменьшения неравномерности выходных импульсных последовательностей .по осям чсоорди- нат, введены последовательно соеди- нен ные первый и второй элементы нез Рэвновначности,а также трехвходовой элемент И-НЕ, декадный счетчик и последовательно соединенные элемент задержки и эл€;мент ИЛИ, первый и второй входы первого элемента неравнозначности соединены с выходами старших разрядов первого и второго двухразрядных регистров сдвига соответственно, второй вход второго элемента неравнозначности соединен с выходом старшего разряда третьего двухразрядного регистра сдвига,входы трехвходового элемента И-НЕ соединены соответственно с выходами старшего разряда первого, второго и третьего двухр1азрядных регистров сдвига, вход записи первого разряда декадного счетчика соединен с выходом второго элемента неравнозначности,вход записи второго разряда декадного счетчика соединен с выходом трехвхоПримечание, х - безразличное состояние.
54П8
дового элемента , вход записи третьего разряда декадного счетчика является входом логической единицы, вход разрешения записи декадного счетчика соединен с его вькодом переполнения и с входом элемента задержки, вход счета на сложение декадного счетчика является входом задающей
10 частоты устройства, выход элемента ИЛИ соединен с входами сдвига первого, второго и третьего Двухразрядных регистров сдвига, второй вхбд элемента ИЛИ является входом устройства,а
15 выходы старших разрядов двухразрядных регистров сдвига являются его вьк одами.
ИГЛ
Л
т ;
чи
/
iM
SI
C1
/л
/
1
(риг.2
Редактор Е.Папп
Составитель А.Исправникова Техред Л. Сердюкова
Заказ 3106/41Тираж 863
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Прбизводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
. ;5
JfO о-
ш
е
f
ип
so в;
W
«4М
С
fp
Фиг.1
Корректор Л..Патай
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Двумерный линейный интерполятор | 1985 |
|
SU1269152A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство фазовой автоподстройки частоты | 1990 |
|
SU1829115A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
Изобретение относится к автоматике и может быть использовано и составе цифровых интерполяторов, систем числового программного управления станками. Цель изобретения - упрощение устройства и повьппение точности отработки контура путем уменьшения неравномерности выходных импульсных последовательностей, подаваемьсх на приводы подач. Устройство содержит входные двухразрядные регистры сдвига по числу координат, декадный счетчик, элемент задержки, элемент ИЛИ и трехвходовый элемент И-НЕ. Устройство обеспечивает анализ состояний старших разрядов двухразрядных регистров сдвига и ввод соответствующего кода по входам записи в декадный счетчик для изменения коэффициента деления в функции соотношения приращений по осям, подлежащих выдаче на приводы подач в текущем такте. 2 ил., 1 табл. i (Л С со. 1C ел 4ib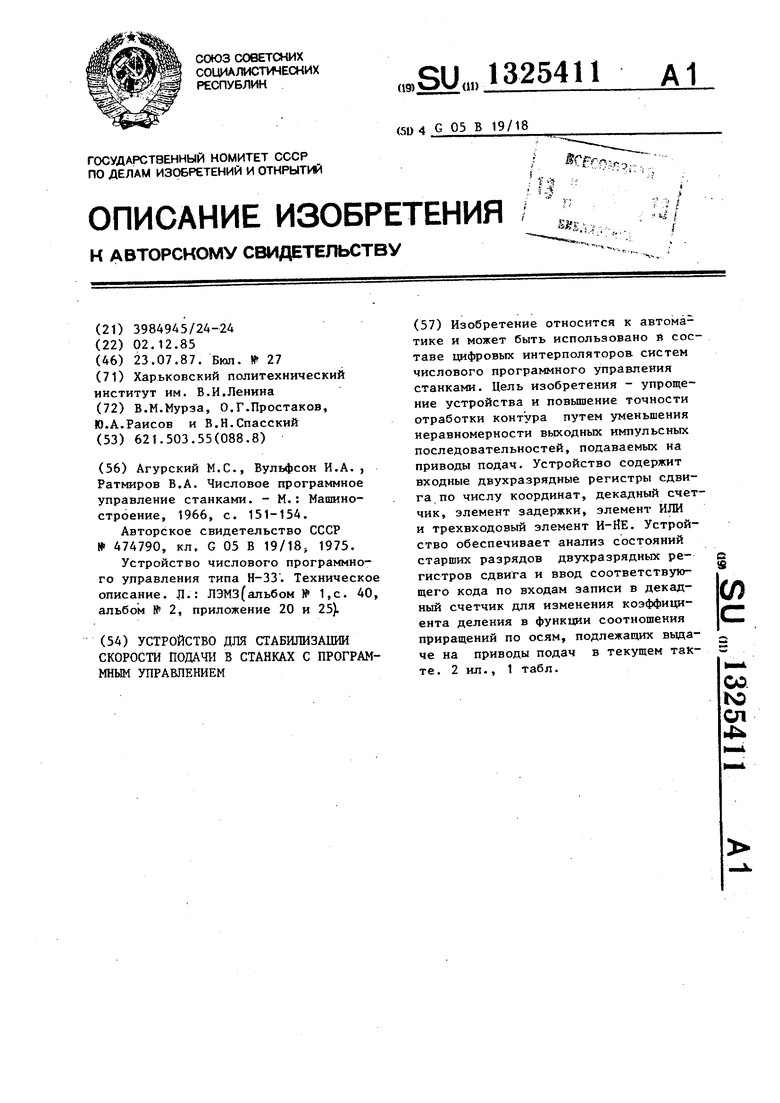
| Агурский М.С., Вульфсон И.А | |||
| , Ратмиров В,А | |||
| Числовое программное управление станками | |||
| - М.: Машиностроение, 1966, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Устройство стабилизации скорости подачи для станков с программным управлением | 1973 |
|
SU474790A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Техническое описание | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
