Изобретение относится к станкостроению и может быть использовано в станках с числовым nporpaMM i .iM viipasiJieHHeM.
Целью изоб|)гге.;мя является упрон1енис конструкции, ,м11ение точности и расширение технологических возможностей привода путем определения момента реверса привода и внесения коррекции на погрешность типа «люфт.
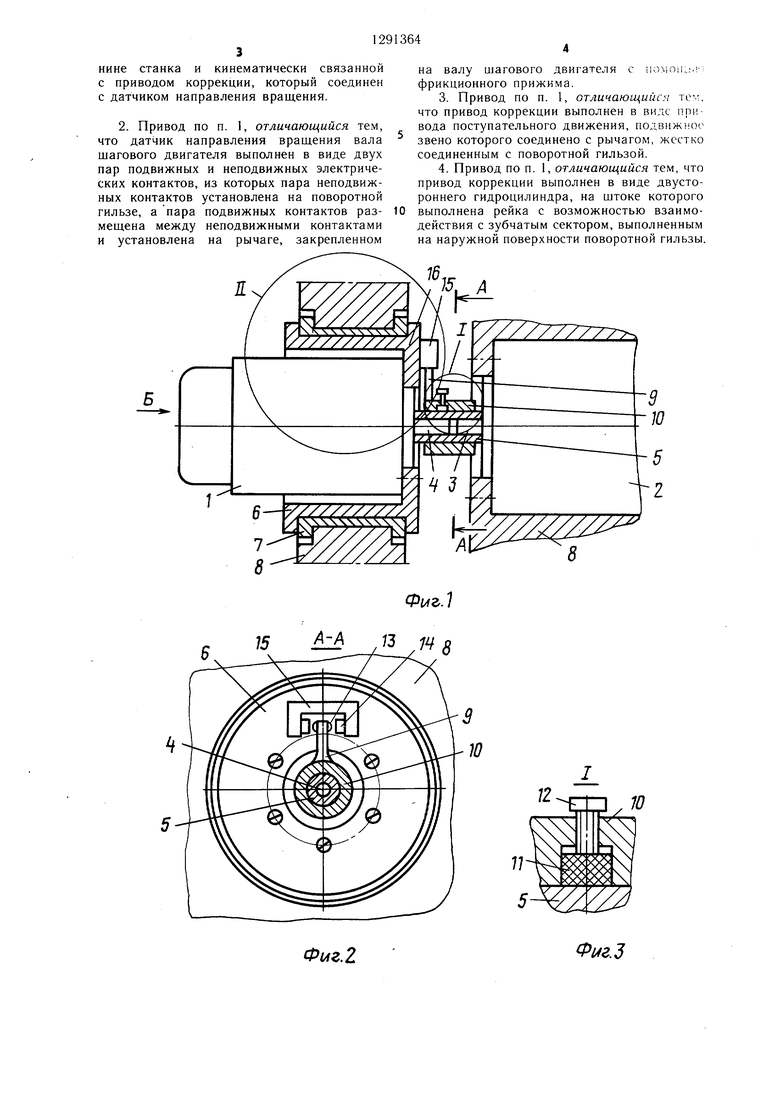
На фиг. 1 показана конструкция привода, рбщий вид; на фиг. 2 - разрез А-А на фиг. 1; fia фиг. 3 - узел I на фиг. 1; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - узел II на фиг. 1; на фиг. б - разрез В-В на фиг. 5.
Привод содержит шаговый двигатель 1, гидроусилитель 2, входной вал 3 которого соединен с валом 4 шагового двигателя муфтой 5. Корпус шагового двигателя закреплен жестко на гильзе 6, установленной в подшипнике 7. На фиг. 1 и 5 показаны подшипники скольжения, хотя могут быть использованы также подшипники качения и другие типы опор вращения. Подшипник установлен в станине 8 станка. На муфту 5 посажен рычаг 9 своей ступицей 10. Ступица притормаживается фрикционным вкладышем 11. Сила торможения регулируется нажимным винтом 12. На верхнем конце рычага 9 установлены подвижные контакты 13, взаимодей- ствуюшие с неподвижными контактами 14, установленными в стойке 15, которая укреплена неподвижно на гильзе 6. Рычаг 9, ступица 10, вкладыш 11, винт 12, контакты 13 и 14 и стойка 15 образуют датчик направления врашения двигателя.
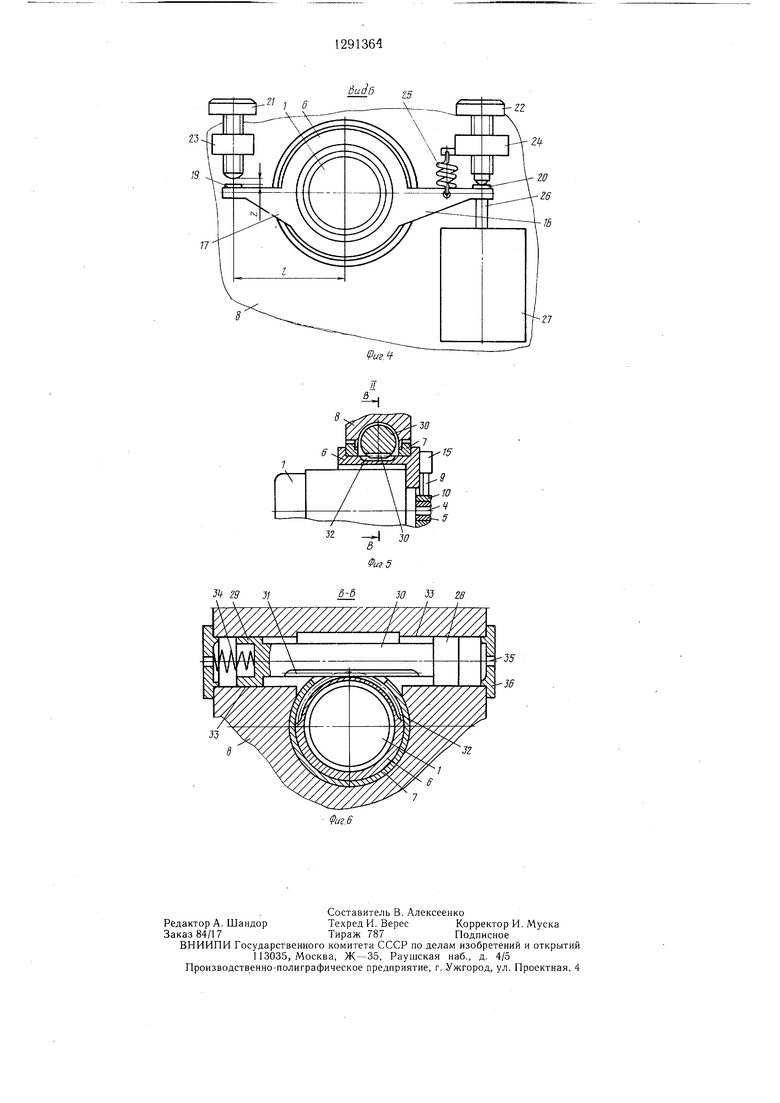
Гильза 6 на правом конце имеет фланец 16, к которому и крепится двигатель 1. На левом конце гильза 6 несет два рычага 17 и 18, взаимодействуюшие через пятки 19 и 20 с микрометрическими винтами 21 и 22 соответственно. Винты 21 и 22 установлены в кронштейнах 23 и 24 станины 8. В исходном положении рычаг 18 поджат пружиной 25 к винту 22. Рычаг 18 соединен с подвижным звеном 26 привода 27 коррекции. Привод коррекции может быть выполнен в виде электромагнита, гидроцилиндра или пневмо- цилиндра или любого другого типа с поступательным перемешением рабочего органа. Возможно также использование поворотного привода коррекции.
В варианте исполнения (фиг. 5 и 6) привод коррекции выполнен в виде двустороннего пневмо- или гидроцилиндра, содержа- ш,его поршни 28 и 29, соединенные штоком 30. На штоке, в средней его части нарезана рейка 31, взаимодействующая с зубчатым венцом 32, нарезанным на гильзе 6. Поршни расположены в расточке 33 станины 8 в крайнем правом положении под действием пружины 34. Сигнал управления на коррекцию подается под правый поршень через отверстие 35 в крышке 36.
5
0
5
0
5
Привод работает следующим образом. Предположим, что на шаговый двига- 1 подается сигнал на вращение против часовой стрелки (фиг. 2). Якорь двигателя, а вместе с ним муфта 5 и вал 3 гидроусилителя начинает вращаться также против часовой стрелки. Через фрикционный вкладыш 11 ступица 10 с рычагом 9 также стремятся повернуться в этом же направлении.. В положении, показанном на фиг. 2, левуе контакты 13 и 14 находятся в соприкосновении. Следовательно, рычаг 9 удерживается неподвижно. При этом вкладыш 11 проскальзывает по поверхности муфты 5. Таким образом, состояние контактов 13 и 14 не изменяется. Это является признаком того, что реверса движения нет и коррекция не требуется. При этом состояние привода коррекции не изменяется. Предположим, что привод 27 коррекции был выключен, рычаг 18 поджат к винту 22. Тогда при рассмотренном движении привод 27 останется выключенным, а рычаг 18 поджатым к винту 22.
В случае, если на шаговый двигатель 1 подается сигнал на вращение по часовой (:трелке, то ступица 10 с рычагом 9 будет увлекаться через вкладыш 11 муфтой 5. Левый контакт 13 отходит от левого неподвижного контакта 14, и обе пары конта.ктов |3 и 14 окажутся разомкнутыми. При дальнейшем вращении вала 4, а вместе с ним и муфты 5 и рычага 9 происходит замыкание правой пары контактов 13 и 14. Таким образом, происходит смена состояния контактов 13 и 14, что говорит о наличии реверса и необходимости введения коррекции на погрешность типа «люфт. Срабатывает привод 27 коррекции. Гильза 6 повернута на величину, определяемую зазором Z (фиг. 4) между пяткой рычага 17 и винтом 21. Величина коррекции по углу поворота равна
Z
где / - плечо рычага 17; Z - зазор между пяткой 19 и опорной головкой винта 21. Этот поворот корпуса шагового двигателя приводит к рассогласованию положения валов 3 и 4, которое устраняется поворотом вала 3 гидроусилителя 2. Т. е. происходит дополнительный поворот выходного вала гидроусилителя 2.
Формула изобретения
1. Привод подач для станков с числовым программным управлением, содержащий шаговый двигатель, гидроусилитель и привод коррекции, отличающийся тем, что, с целью упрощения конструкции, повышения точности и расширения технологических возможностей, он дополнительно снабжен датчиком направления вращения вала щаго- вого двигателя, который установлен в поворотной гильзе, размещенной в опоре на станине станка и кинематически связанной с приводом коррекции, который соединен с датчиком направления вращения.
2. Привод по п. 1, отличающийся тем, что датчик направления вращения вала щагового двигателя выполнен в виде двух пар подвижных и неподвижных электрических контактов, из которых пара неподвижных контактов установлена на поворотной гильзе, а пара подвижных контактов размещена между неподвижными контактами и установлена на рычаге, закрепленном
на валу шагового двигателя с и фрикционного прижима.
3.Привод по п. 1, отличающийся тем. что привод коррекции выполнен в внлс привода поступательного движения, по;и5ижнос звено которого соединено с рычагом, жестко соединенным с поворотной гильзой.
4.Привод по п. 1, отличающийся тем, что привод коррекции выполнен в виде двустороннего гидроцилиндра, на щтоке которого выполнена рейка с возможностью взаимодействия с зубчатым сектором, выполненным на наружной поверхности поворотной гильзы.
Ф(г.2
.5
биЗб
21
Vue.4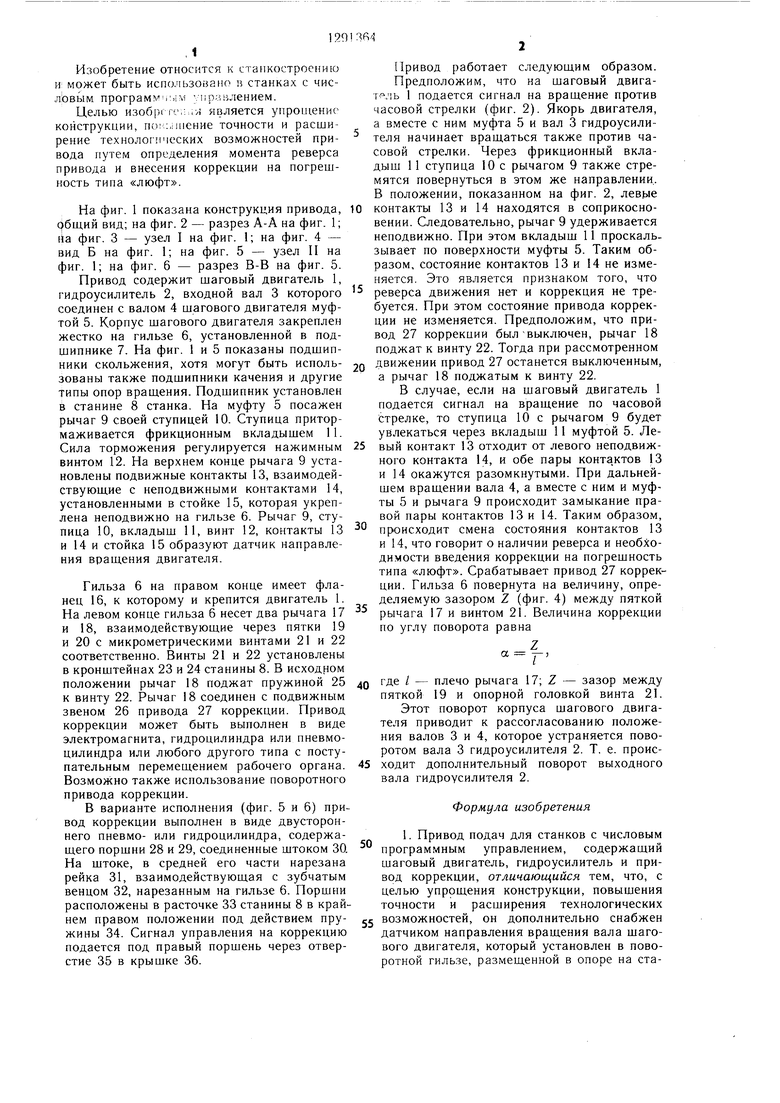
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм разжима брусков хонинговального станка | 2015 |
|
RU2617186C2 |
| Мобильный расточной станок | 2020 |
|
RU2753848C1 |
| Станок для изготовления секцийэлЕКТРичЕСКиХ МАшиН | 1979 |
|
SU828324A1 |
| Вертикальный шлифовальный станок с числовым программным управлением | 1975 |
|
SU656813A1 |
| Зубофрезерный станок | 1977 |
|
SU864692A1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| УСТРОЙСТВО для ПРОБИВКИ оконв | 1969 |
|
SU241382A1 |
| Автоматизированная установка для перфорации листовых заготовок | 1983 |
|
SU1091965A1 |
| Переносной металлорежущий станок | 1990 |
|
SU1745432A1 |
Изобретение относится к станкостроению, в частности к приводам подач для станков с числовым программным управлением. Цель изобретения - упрощение конструкции, повышение точности и расширение технологических возможностей привода. Привод содержит шаговый двигатель, гидроусилитель, привод коррекции и датчик направления вращения вала двигателя. Шаговый двигатель установлен в гильзе, размещенной в опоре с возможностью ее поворота приводом коррекции. Датчик направления вращения выполнен в виде двух пар контактов так, что неподвижные контакты размещены на гильзе, а подвижные - на рычаге, посаженном с возможностью поворота на валу шагового двигателя. Привод коррекции выполнен в виде привода поступательного перемещения, подвижное звено которого соединено с рычагом, жестко скрепленным с гильзой. Приводится вариант исполнения привода коррекции в виде двустороннего пневмо- или гидроцилиндра, на штоке которого выполнена рейка, взаимодействующая с зубчатым сектором, установленным на наружной поверхности гильзы. 3 з. п. ф-лы, 6 ил. (С (Л о со со О5 4;
Л 23 J/
32
| Ратмиров В | |||
| А | |||
| и др | |||
| Повышение точности и производительности станков с программным управлением | |||
| М.: Машиностроение, 1970, с | |||
| Станок для изготовления из дерева круглых палочек | 1915 |
|
SU207A1 |
