Изобретение относится к машиностроению и может быть использовано в различных объектах для обеспечения электропневмогидравлических связей их подвижных и неподвижных частей.
Цель изобретения - расширение эксплуатационных возможностей и повышение надежности в работе путем увеличения несущей способности несущего механизма.
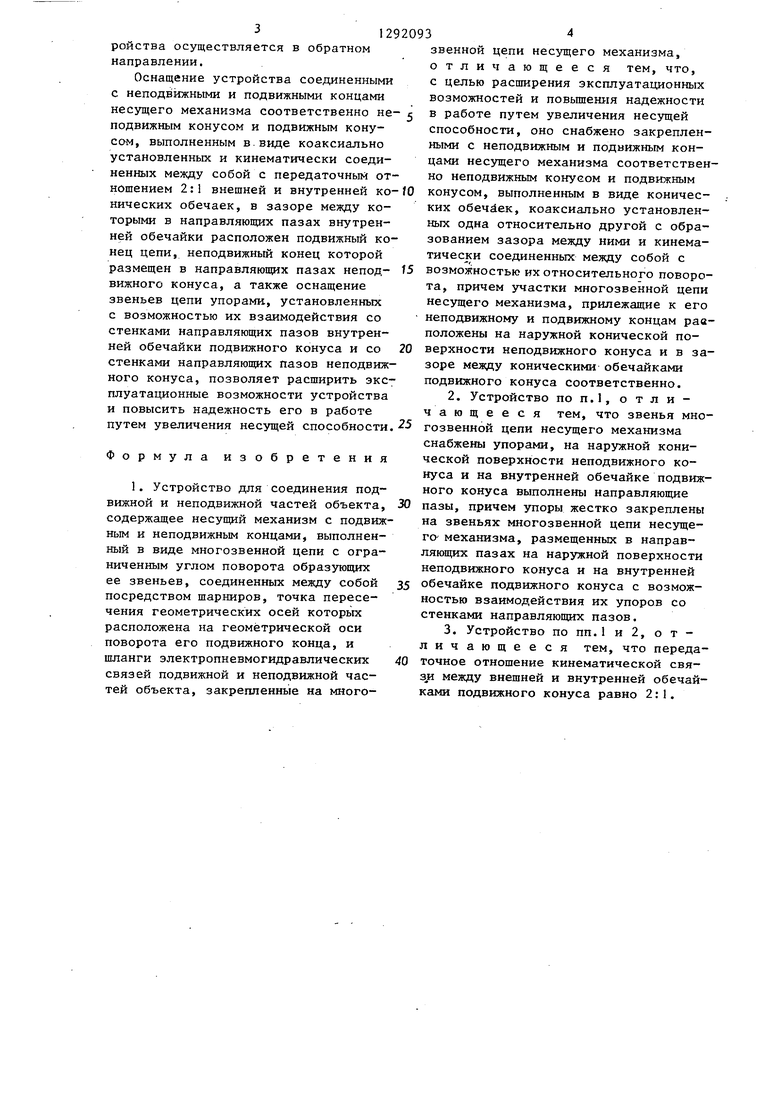
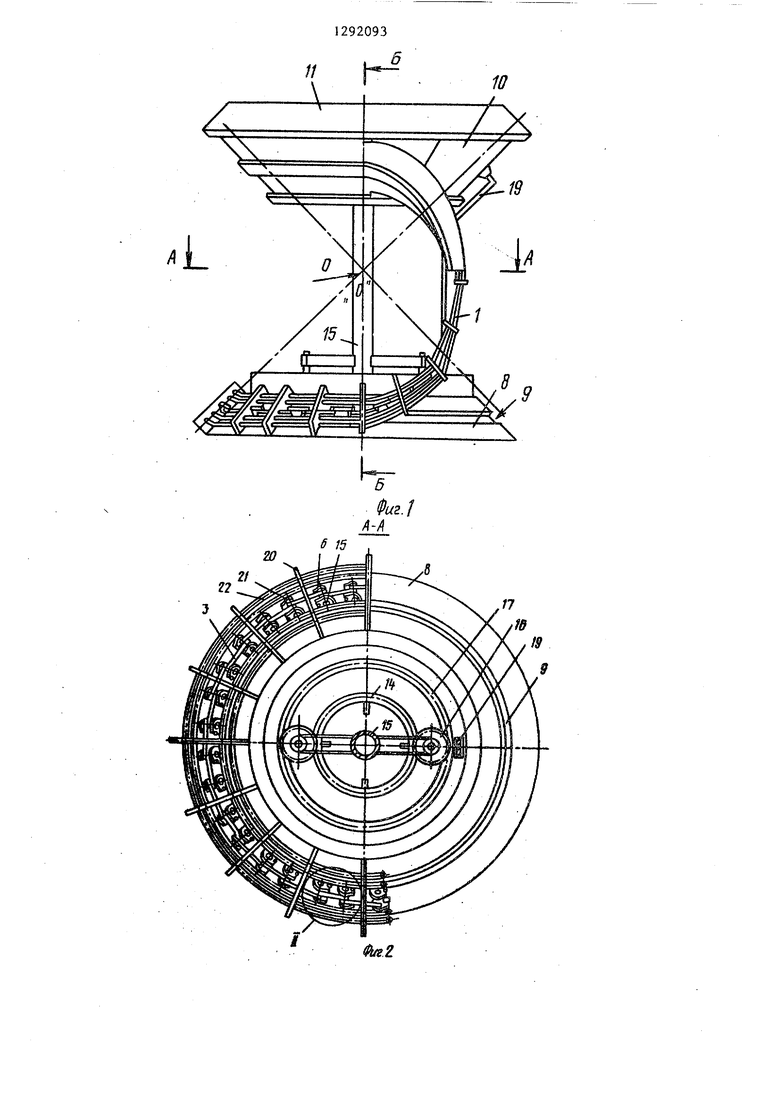
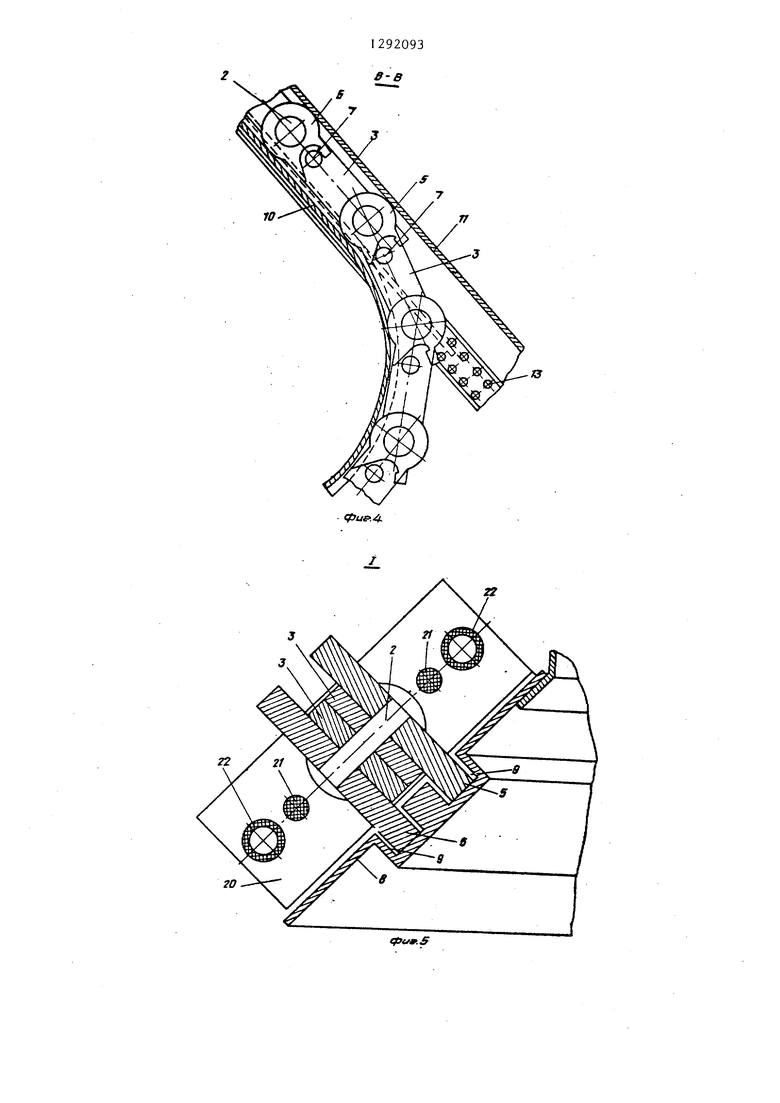
На фиг,1 изображено устройство для соединения подвижной и неподвижной частей объекта, общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1; на фиг,4 - сечение В-Б на фиг.З; на фиг.З - узел I на фиг.З; на фиг.6 узел II на фиг.2. 1
Устройство для соединения подвижной и неподвижной частей объекта содержит несущий механизм, выполненный в виде многозвенной цепи 1, образованной шарнирно соединенными между собой посредством осей 2 звеньями 3 со скосами 4 и с жестко закрепленными на них упорами 5-7 (фиг.6). Неподвижный конец цепи 1 закреплен на установленном на неподвижной части объекта (не показана) неподвижном конусе 8 с направляющими пазами 9.
Подвижный конец цепи 1 размещен в зазоре между внутренней 10 и внешней I1 коническими обечайками, посредством которых образован установленный на подвижной части объекта (не показана) подвижный конус, который закреплен на внутренней конической обечайке 0 и расположен в ее направляющих пазах 12 с возможностью взаимодействия с,их стенками упоров 5 и 6 звеньев 3 цепи 1 (фиг.З и 4). Обечайка 10 коаксиально установлена в обечайке 11 на опорах 13 последней и кинематически соединена с.ней посредством зубчатой передачи, образованной жестко закрепленной на неподвижном конусе 8 неподвижной шестерней 14, установленными на жестко закрепленной на внешней обечайке 11 опоре 15 сателлитами 16 и шестерней 17 с внутренним зубом, установленной с возможностью вращения на опорах 18 неподвижного конуса 8 и жестко .соединенной посредством тяги 19 с внутренней обечайкой 10 подвижного конуса (фиг.З). На каждом втором звене 3 цепи 1 закреплена пластина 20 с отверстиями для размещения кабелей 21
и шлангов 22 для обеспечения электропневмогидравлических связей подвижной и неподвижной частей объекта. Передаточное отношение кинематической связи между внешней I1 и внут-. ренней IО коническими обечайками принято равным 2:1,- что связано с требованием обеспечения отсутствия провисания участка цепи 1, расположенного между подвижным и неподвижным конусами устройства. Наличие на звеньях 3 цепи 1 упоров 5 и 6, взаимодействующих с упорами 7 смежных звеньев, ограничивает угол относительного поворота звеньев 3 в одной . плоскости, а наличие на звеньях 3 скосов 4 определяет относительный . поворот звеньев 3 в другой плоскости, в результате чего на участке цепи 1 , расположенном между подвижным и неподвижным конусами, звенья 3 цепи I занимают такое положение, при котором геометрические оси соединяющих их осей 2 пересекаются в одной точке О, лежащей на геометрической оси поворота подвижного конуса (фиг.), что в целом дает основания рассматривать указанный участок цепи как жесткую бгшку.
Устройство работает следующим образом.
При повороте подвижной части объекта вместе с ней поворачивается
внешняя обечайка 11 и жестко соединенная с ней опора 15, сателлиты 16 которой, обкатываясь вокруг .неподвижной шестерни 14 конуса 8, приводят во вращение шестерню 17, которая
через тягу 19 обеспечивает поворот внутренней обечайки 10 в ту же сторону, благодаря чему участок подвижного конуса, в который входит цепь 1, постоянно.располагается над участком неподвижного конуса, с которого исходит цепь 1 , Отрезок цепи 1 , расположенный меж; у подвижным и неподвижным кзнусамкг, сохраняет форму жесткой балки, а участки цепи, прилежащие к ее подвижному и неподвижному концам, соответственно входят в пазы 12 внутренней обечайки 10 подвижного конуса и выходят из пазов 9 неподвижного конуса 8.
При повороте подвижной части объекта в другую сторон5 работа устройства происходит аналогично описанному, но движение всех элементов устройства осуществляется в обратном направлении.
Оснащение устройства соединенными с неподвижными и подвижными концами несущего механизма соответственно не подвижным конусом и подвижным конусом, выполненным в.виде коаксиально установленных и кинематически соединенных между собой с передаточный отношением 2:1 внешней и внутренней ко нических обечаек, в зазоре между которыми в направляющих пазах внутренней обечайки расположен подвижный конец цепи, неподвижный конец которой размещен в направляющих пазах непод- вижного конуса, а также оснащение звеньев цепи упорами, установленных с возможностью их взаимодействия со стенками направляющих пазов внутренней обечайки подвижного конуса и со стенками направляющих пазов неподвижного конуса, позволяет расширить эксплуатационные возможности устройства и повысить надежность его в работе путем увеличения несущей способности
Формула изобретения
1. Устройство для соединения подвижной и неподвижной частей объекта, содержащее несущий механизм с подвижным и неподвижным концами, выполненный в виде многозвенной цепи с ограниченным углом поворота образующих ее звеньев, соединенных между собой посредством шарниров, точка пересечения геометрических осей которых расположена на геометрической оси поворота его подвижного конца, и шланги электропневмогидравлических связей подвижной и неподвижной частей объекта, закрепленные на многозвенной цепи несущего механизма, отличающееся тем, что, с целью расширения эксплуатационных возможностей и повьшения надежности в работе путем увеличения несущей способности, оно снабжено закрепленными с неподвижным и подвижным концами несущего механизма соответственно неподвижным конусом и подвижным конусом, выполненным в виде конических обечйек, коаксиально установленных одна относительно другой с образованием зазора между ними и кинематически соединенных между собой с возможностью их относительного поворота, причем участки многозвенной цепи несущего механизма, прилежащие к его неподвижному и подвижному концам раа- положены на наружной конической поверхности неподвижного конуса и в зазоре между коническими обечайками подвижного конуса соответственно.
2.Устройство по П.1, о т л и - чающееся тем, что звенья многозвенной цепи несущего механизма снабжены упорами, на наружной конической поверхности неподвижного конуса и на внутренней обечайке подвижного конуса выполнены направляющие пазы, причем упоры жестко закреплены на звеньях многозвенной цепи несущего- механизма, размещенных в направляющих пазах на наружной поверхности неподвижного конуса и на внутренней обечайке подвижного конуса с возможностью взаимодействия их упоров со стенками направляющих пазов.
3.Устройство по пп.1 и 2, о т - личающееся тем, что передаточное отношение кинематической свя- з.и между внешней и внутренней обечайками подвижного конуса равно 2:1.
11 r
10
Фиг2
CfJuffi.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Устройство для закладки лучевых дрен | 1980 |
|
SU1038420A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Инструментальный магазин | 1986 |
|
SU1351737A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| Рука робота | 1991 |
|
SU1757877A1 |
| МЕХАНИЗМ С ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2282082C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
Изобретение относится к машиностроению. Цель - расширение эксплуатационных возможностей и повьшение надежности в работе устройства для соединения подвижной части объекта (ПЧО) и неподвижной части объекта (НЧО). Устройство содержит несущий механизм в виде многозвенной цепи (МЦ), неподвижный конец которой закреплен на НЧО, а подвижный - на ПЧО. Цель достигается тем, что НЧО - это неподвижный конус 8 с направляющими пазами 9, а ПЧО - это подвижный конус, имеющий внешнюю 1 и внутренрпою 10 обечайки, коаксиально установленные на опорах 13 и кинематически соединенные посредством зубчатой передачи с передаточным отношением 2:1, образованной неподвижной шестерней 14, сателлитами 16 и шестерней 17 с внутренним зубом и жестко соединенной тягой 19 МЦ имеет звенья 3 с упорами 5, 6, и на каждом втором звене 3 закреплена пластина 20 с отверстиями для кабелей и шлангов 22 для обеспечения электропневмогидрав- лических связей- обеих частей объекта. Изобретение позволяет увеличить несущую способность несущего механизма.- 2 з.п. ф-лы, 6 ил. § (Л V7 CDW.J
22
20
a
фиг.6
Редактор О.Головач
Составитель Ю.Сотников Техред Л.Олейник
Заказ 279/53
Тираж 619 .Подписное
ВНЙИПИ государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-355 Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Зимокосов
| Устройство для электрической связи подвижной и неподвижной частей объекта | 1980 |
|
SU866799A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для соединения гибкими кабелями неподвижной части машины с поворотной | 1977 |
|
SU687517A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
