Фиг. 2
Изобретение относится к машиностроению и может быть применено для подачи и съема деталей с рабочих позиций сборочного и технологического оборудования, например, в полупроводниковом производстве.
Цель изобретения - улучшение функциональных возможностей путем введения дополнительных рабочих траекторий.
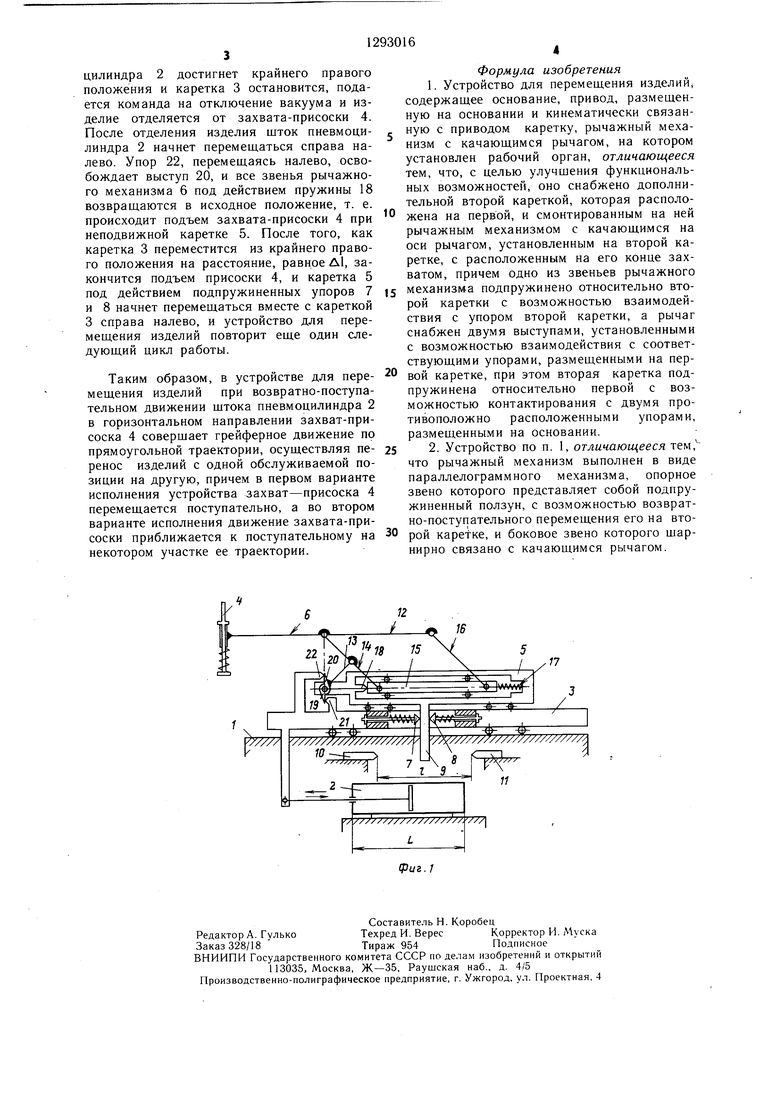
На фиг. 1 изображено устройство для перемещения изделий, рычажный механизм которого выполнен с прямолинейно-поступательно перемещаюш,имся ведомым звеном; на фиг. 2 - то же, в виде качаюшегося рычага.
Устройство для неремеш,ения изделий соретки 5, L - ход штока пневмоцилиндра 2, равный ходу каретки 3.
Стрелками обозначены направления перемещения подвижных звеньев устройства.
Устройство для перемещения изделий работает следующим образом.
20
25
Из исходного положения шток пневмоцилиндра 2 начнет перемещаться, например справа налево, перемещая каретку 3, при этом вместе с кареткой 3 перемещается также каретка 5 с размещенным на ней рычажным механизмом 6 и захватом-присоской 4. Каретка 5 перемещается до тех пор,
держит основание 1, привод, например пнев- 15 пока ее выступ 9 не достигнет упора 10, моцилиндр 2, каретку 3, которая размеще-при этом каретка 5 остановится и, следона на основании 1 и кинематически связанавательно, остановится рычажный мехас приводом, подпружиненный захват изде-низм 6 вместе с захватом изделий - присослий, например вакуумную присоску 4, вто-кой 4, а каретка 3 будет перемещаться на
расстояние, равное длине перебега Д1, где Al 0,5(L-I). При перемещении каретки 3 относительно каретки 5 упор 21, размещенный на каретке 3, взаимодействуя с выступом 19, начнет поворачивать ведущее звено 12 (фиг. 1) или рычаг 23 (фиг. 2) рычажного механизма 6. При этом захват изделий - присоска 4 начнет перемещаться вниз в вертикальном направлении, причем это перемещение будет осуществляться в устройстве за счет прямолинейно-поступательного перемещения ведомого звена 12 (фиг. 1) и за счет качательного движения рычага 23 (фиг. 2). После того как шток пневмоцилиндра 2 достигнет крайнего левого положения и каретка 3 остановится, подается команда на включение вакуума, и присоска 4 осуществляет захват изделия (не показано). Затем шток пневмоцилиндра 2 начнет перемещаться в обратном направлении, слева направо, при этом упор 21 каретки 3 также перемещается направо, отпуская выступ 19, и звенья рычажного, зун 15 подпружинен пружинами 17 и 18 и 40 механизма 6 под действием пружины 17 воз- расположен параллельно кареткам 3 и 5.вращаются в исходное положение, т. е. про- На ведущем звене рычажного механизма 6,исходит подъем присоски 4 при неподвиж- которым является качающийся рычаг 13, выполнены выступы 19 и 20, периодически взаимодействующие с упорами 21 и 22, размещенными на каретке 3.
Во втором варианте исполнения рычажный механизм 6 выполнен в виде качающегося рычага 23, на котором размещен подпружиненный захват изделий - вакуумная присоска 4 и выполнены выступы 19 и 20, 50
рую каретку 5, размещенную на каретке 3 ей параллельно, и рычажный механизм 6, размещенный на каретке 5. Каретка 5 удерживается в определенном положении относительно каретки 3 с помощью подпружиненных упоров 7 и 8 и снабжена выступом 9, который периодически взаимодействует с упорами 10 и 11, размещенными на основании 1.
В первом варианте исполнения рычажный механизм 6 выполнен с прямолинейно- поступательно перемещающимся ведомым звеном 12, на котором размещен подпружиненный захват изделий - вакуумная присоска 4, причем рычажный механизм 6 состоит из параллелограммного механизма, щарнирно связанного с качающимся рычагом 13, содержащего боковое звено 14, ползун 15 (опорное звено), причем качающийся рычаг 13 вдвое короче бокового звена 14 и присоединен к его середине, и диаду, звенья 12 и 16 которой щарнирно связаны с ползуном 15 и боковым звеном 14. Пол30
35
45
периодически взаимодействующие с упорами 21 и 22, размещенными на каретке 3. Рычаг 23 подпружинен пружиной 24 и взаимодействует с упором 25, размещенным на каретке 5, а ось 26 качания рычага 23 размещена в одной плоскости с торцом 27 вакуумной присоски 4.
На чертежах обозначены: 1 - расстояние между упорами 10 и 11, равное ходу ка55
ной каретке 5. После того, как каретка 3 переместится из крайнего левого положения на расстояние, равное Д1, закончится подъем присоски 4 с захваченным изделием, и каретка 5 под действием подпружиненных упоров 7 и 8 начнет перемещаться вместе с ,кареткой 3 направо на расстояние 1, т. е. до тех пор, пока выступ 9 не достигнет упора П. Каретка 5 вновь будет остановлена, а каретка 3 будет продолжать перемещаться далее на расстояние, равное длине перебега Д.1. При этом упор 22 каретки 3, взаимодействуя с выступом 20, начнет поворачивать ведущее звено 12 или рычаг 23 рычажного механизма 6 и захват-присоска 4, размещенный на этом звене, начнет перемещаться по вертикали вниз при неподвижной каретке 5. После того, как шток пнев.моретки 5, L - ход штока пневмоцилиндра 2, равный ходу каретки 3.
Стрелками обозначены направления перемещения подвижных звеньев устройства.
Устройство для перемещения изделий работает следующим образом.
расстояние, равное длине перебега Д1, где Al 0,5(L-I). При перемещении каретки 3 относительно каретки 5 упор 21, размещенный на каретке 3, взаимодействуя с выступом 19, начнет поворачивать ведущее звено 12 (фиг. 1) или рычаг 23 (фиг. 2) рычажного механизма 6. При этом захват изделий - присоска 4 начнет перемещаться вниз в вертикальном направлении, причем это перемещение будет осуществляться в устройстве за счет прямолинейно-поступательного перемещения ведомого звена 12 (фиг. 1) и за счет качательного движения рычага 23 (фиг. 2). После того как шток пневмоцилиндра 2 достигнет крайнего левого положения и каретка 3 остановится, подается команда на включение вакуума, и присоска 4 осуществляет захват изделия (не показано). Затем шток пневмоцилиндра 2 начнет перемещаться в обратном направлении, слева направо, при этом упор 21 каретки 3 также перемещается направо, отпуская выступ 19, и звенья рычажного, механизма 6 под действием пружины 17 воз- вращаются в исходное положение, т. е. про- исходит подъем присоски 4 при неподвиж-
0
5
5
ной каретке 5. После того, как каретка 3 переместится из крайнего левого положения на расстояние, равное Д1, закончится подъем присоски 4 с захваченным изделием, и каретка 5 под действием подпружиненных упоров 7 и 8 начнет перемещаться вместе с ,кареткой 3 направо на расстояние 1, т. е. до тех пор, пока выступ 9 не достигнет упора П. Каретка 5 вновь будет остановлена, а каретка 3 будет продолжать перемещаться далее на расстояние, равное длине перебега Д.1. При этом упор 22 каретки 3, взаимодействуя с выступом 20, начнет поворачивать ведущее звено 12 или рычаг 23 рычажного механизма 6 и захват-присоска 4, размещенный на этом звене, начнет перемещаться по вертикали вниз при неподвижной каретке 5. После того, как шток пнев.моцилиндра 2 достигнет крайнего правого положения и каретка 3 остановится, подается команда на отключение вакуума и изделие отделяется от захвата-присоски 4. После отделения изделия шток пневмоци- линдра 2 начнет перемещаться справа налево. Упор 22, перемещаясь налево, освобождает выступ 20, и все звенья рычажного механизма 6 под действием пружины 18 возвращаются в исходное положение, т. е. происходит подъем захвата-присоски 4 при неподвижной каретке 5. После того, как каретка 3 переместится из крайнего правого положения на расстояние, равное Al, закончится подъем присоски 4, и каретка 5 под действием подпружиненных упоров 7 и 8 начнет перемещаться вместе с кареткой 3 справа налево, и устройство для перемещения изделий повторит еще один следующий цикл работы.
Таким образом, в устройстве для перемещения изделий при возвратно-поступательном движении щтока пневмоцилиндра 2 в горизонтальном направлении захват-присоска 4 совершает грейферное движение по прямоугольной траектории, осуществляя пе- ренос изделий с одной обслуживаемой позиции на другую, причем в первом варианте исполнения устройства захват-присоска 4 перемещается поступательно, а во втором варианте исполнения движение захвата-присоски приближается к поступательному на некотором участке ее траектории.
0
5
Формула изобретения
1.Устройство для перемещения изделий содержащее основание, привод, размещенную на основании и кинематически связанную с приводом каретку, рычажный механизм с качающимся рычагом, на котором установлен рабочий орган, отличающееся тем, что, с целью улучщения функциональных возможностей, оно снабжено дополнительной второй кареткой, которая расположена на первой, и смонтированным на ней рычажным механизмом с качающимся на оси рычагом, установленным на второй каретке, с расположенным на его конце захватом, причем одно из звеньев рычажного
5 механизма подпружинено относительно второй каретки с возможностью взаимодействия с упором второй каретки, а рычаг снабжен двумя выступами, установленными с возможностью взаимодействия с соответствующими упорами, размещенными на первой каретке, при этом вторая каретка подпружинена относительно первой с возможностью контактирования с двумя противоположно расположенными упорами, размещенными на основании.
2.Устройство по п. 1, отличающееся тем, что рычажный механизм выполнен в виде параллелограммного механизма, опорное звено которого представляет собой подпружиненный ползун, с возможностью возвратно-поступательного перемещения его на второй каретке, и боковое звено которого щар- нирно связано с качающимся рычагом.
0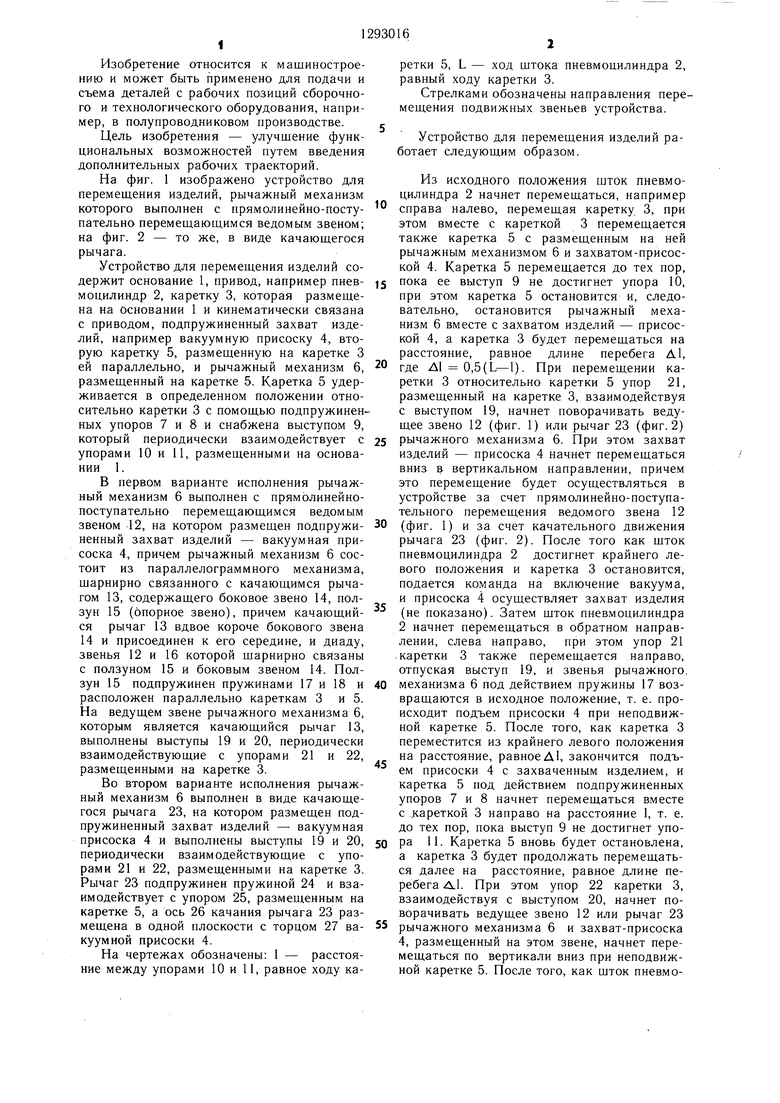
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Устройство для установки заготовок в пресс | 1988 |
|
SU1523233A1 |
| Робот | 1991 |
|
SU1781026A1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Установка для сборки пакетов | 1982 |
|
SU1106792A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Устройство для установки радиоэлементов на печатные платы | 1988 |
|
SU1631766A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Автооператор | 1977 |
|
SU638450A1 |
Изобретение относится к области машиностроения и может быть применено для подачи и съема деталей с рабочих позиций сборочно-технологического оборудования. Цель изобретения - улучшение функциональных возможностей путем введения дополнительных рабочих траекторий. Устройство снабжено дополнительной второй кареткой 5, которая расположена на первой каретке 3, и установленным на второй каретке рычажным механизмом 6 с качающимся на оси 26 рычагом 23 с расположенным на его конце захватом 4. Звено рычажного механизма подпружинено относительно второй каретки с возможностью взаимодействия с упором 25 второй каретки. Рычаг 23 снабжен двумя выступами 19 и 20, установленными с возможностью взаимодействия с соответствующими упорами 21 и 22, размешенными на первой каретке, при этом вторая каретка подпружинена относительно первой с возможностью контактирования с двумя противоположно расположенными упорами 10 и 11, размещенными на основании 1. 1 3. п. ф-лы, 2 ил. i (Л 5 25 8 22 20 (/7/777/7/7/////ХУ. 7 /5 /П 2/ ю со СдЭ о:)
Составитель Н. Коробец
Редактор А. ГулькоТехред И. ВересКорректор И. Муска
Заказ 328/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам нзобретеннй я открытий
113035, Москва, Ж--35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1980 |
|
SU1044457A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
