ИзрСретение касается двухпозиционных манипуляторов и может быть использовано для ав5 оматиэации загрузочно-разгрузочных операций при обслуживании сборочного или другого технологического оборудования. Известен манипулятор, содержащий смонтированный в корпусе ползун с исполнительным органом, установленный с возможностью возвратно-поступательных перемещений по направляющим в двух взаимно перпендикулярных направлениях посредством приводов, причем одна, из направляющих, преиМ8пцественно для межпозиционного перемещения, смонт.ирована неподвижно в корпусе fj . Однако манипулятор не Обеспечивает достаточную точность позиционирования из-за зазоров в направляющих, а также имеет большой вес подвижных частей. Цель изобретения - повышение точности позиционирования и уменьше ние веса подвижных масс. Для достижения поставленной цели, манипулятор, содержащий смон тированный в корпусе ползун с испол нительным органом, установленный с возможностью возвратно-поступател ных перемещений по направляющшл в ДВУХ взаимно перпендикулярных напра лениях посредством приводов, причем одна из направляющих, преимуществен для межпозицирнного перемещения,смо тирована неподвижно в корпусе,направлякяцие для перемещения ползуна при захвате и установке деталей неподвижно закреплены над обслуживаемыми позициями, выполнены отк алтыми со стороны подвода к ним ползуна, который связан с приводом межпозици ОННОГ.О перемещения посредством коро мысла, ось которого расположена в пазу межпозиционной направляющей, и промежуточного упругого звена. На фиг.1 изображён манипулятор общий вид; на фиг.2 - вариант конструктивного выполнения призматической направляющей; на фиг.З - раз рез А-А на фиг.2. На основании 1 смонтирован корпус 2 манипулятора, в котором в вид 1паза 3 выполнена направляющая для возвратно-поступательного перемещения ползуна 4 с исполнительным орга ном 5 (например, вакуумным схватом или присосом) в горизонтальном направлении по траектории ВС между поз циями захвата детали из загрузочной емкости (не показана) и установки захваченной детали на рабочую позидию технологической маиданы (не показана). В корпусе 2 на позиции захвата детали из загрузочной емкости смон.тирована призматическая направляющая б для перемещения ползуна 4с с исполнительНБМ органом 5 в верти кальном направлении по траектории НА , а на пЬзиции установки.детали в рабочую зону.- призматическая направляюцая 7 для перемещения пол зуна 4 по траектории СД. Обе направляющие б и 7 выполнены открытыми со стороны подвода к ним Лолзуна 4, который связан с приводом (показано выходное звено привода) посредством коромысла 8 с роликом 9,расположенным в пазу горизонтальной направляющей 3, и промежуточного упругого звена 10, например, упругих пластин. На ползуне 4 расположены регулируемые упоры 11 и 12,.определяющие глубину опускания исполнительного органа 5 на загрузочной и рабочей позициях обслуживаемой технологической машины. На верхних торцах призматических направляющих б и 7 смонтированы соответственно ограничители 13 и 14, в которые упираются регулируемые упоры 11 и 12 при нижнем положении ползуна 4 с исполнитель ньам органом 5 в момент захвата им детали из загрузочной, емкости (точка А) и установки ее на рабочей позиции (точка-.Д). Направляющие б и 7 могут быть снабжены роликовыми парами 15, установленными на шарикоподшипниках 16 йля облегчения вертикального перемещения ползуна. 4 (фиг. 2 и 3) . Коромысло 8 с ползуном 4 связано шарниром 17. Вертикальное перемещение ползуну 4 с исполнительным органом 5 сообщает привод 18, например, пневмоцилиндр. Манипулятор.работает следующим образом. В исходном положении под действием упргого звена 10 в направлении, условно показанном стрелкой , ползун 4 упруго .поджат к внутренней поверхности призматической направляющей 6, по которой он вместе с исполнительным органом 5 под действием привода 18 опускается по траектории ВА до остановки упора 11 на ограничителе 13. В момент остановки исполнительного органа 5 в точке А происходит захват детали из загрузочной емкости, затем ползун 4 поднимается по АВ и под действием привода горизонтального пет ремещения захваченная исполнительным органом 5 деталь переносится по траектории ВС на позицию установки ее в рабо.чую зону технологической машины, при этом ползун 4 перемещается до упругого поджима к внутренней поверхности второй призматической направля ощей 7 под действием промежуточного звена 10 в направлении стрелки М. В процессе переноса детали между позициями и при обратном ходе ползуна 4 ролик 9 коромысла 8 свободно перекатывается в пазу горизонтальной направляющей 3. После остановки ползула 4 у равлякхцей 7 под действием привода 18 происходит опускание ползуна 4 с исполнительным органом 5 по траектории СД до тех пор, пока упор 12 не достигает бграничителя 14. Удерживаемая исполнительньм орга)ом 5 детал устанавливается на рабочую позицию технологической машины. Затем ползун 4 поднимается и отводится к загрузочной позиции,после чего цикл повторяется. Предлагаемый манипулятор при значительной простоте конструктивного вы1057 полнения обедпечивает высокую точ ность позиционирования благодаря |упругому поджатию ползуна к внутренней поверхности вертикальных призматических напргшлямцих, так как при этом исключаются какие-либо люфтовые погрешности при его вертикальных перемещениях. Точность позиционирования, как показали исцытания Макета, достигает 0,005 мм. Благодаря эакреп лению вертикальных призматических (Направляющих в корпусе манипулятора значительно снижается вес подвижник масс, что существенно улучшает рабочие характеристики манипулятора.
A
иг. 3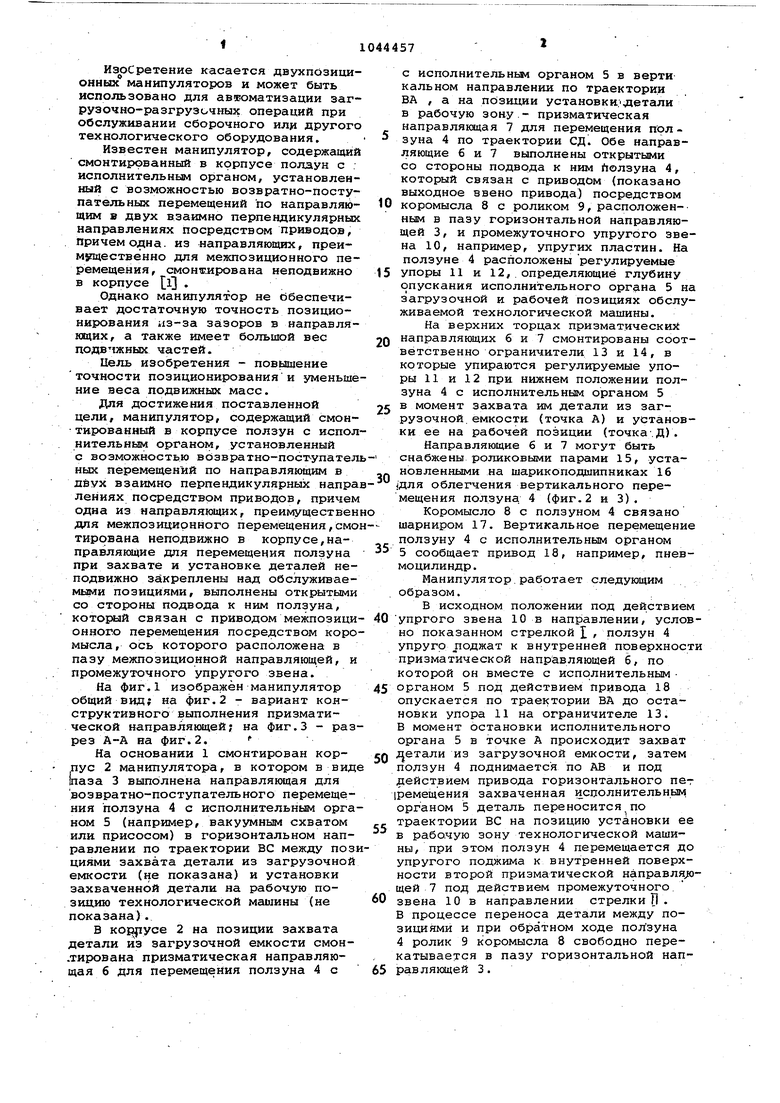

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1227459A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| МАНИПУЛЯТОР ДЛЯ ШТАМПОВОЧНОГО МОЛОТА | 2000 |
|
RU2176171C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ЛУЖЕНИЯ ЗАГОТОВОК СТЕКЛОКЕРАМИЧЕСКИХ КОНДЕНСАТОРОВ РАДИОДЕТАЛЕЙ | 1989 |
|
SU1820573A1 |
| Механизм переноса заготовок между позициями матриц | 1980 |
|
SU1006027A1 |
| Манипулятор | 1984 |
|
SU1263522A1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
МАНИПУЛЯТОР, содерзкащий смонтированный в корпусе ползун с исполнительным органом, установлен ный с возможностью возвратно-посо У пательных перемещений по направляющим в двух взаимно перпендикулярных направлениях посредством прип . п иг. 1 водов, причем одна из направляющих преимущественно для межпозиционного перемещения, 1смонтирована неподвижно в корпусе, отличающийс я тем, что, с целью улучшения диНс1Мических характеристик и повЬ шения точности позиционирования, направлякяцие для перемещения под«зуна при захвате и установке деталей неподвижно закреплены над обслуживаемыми позициями, выполнены открытыми со стороны подвода к ним ползуна, который связан с приводом межпозиционного перемещения посредством коромысла, ось которого рас положена в пазу межпозиционной направляющей, и промежуточного упругого звена. /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект Швейцарской фкЕМЫ banco Economic, 19/79 (прототип). | |||
