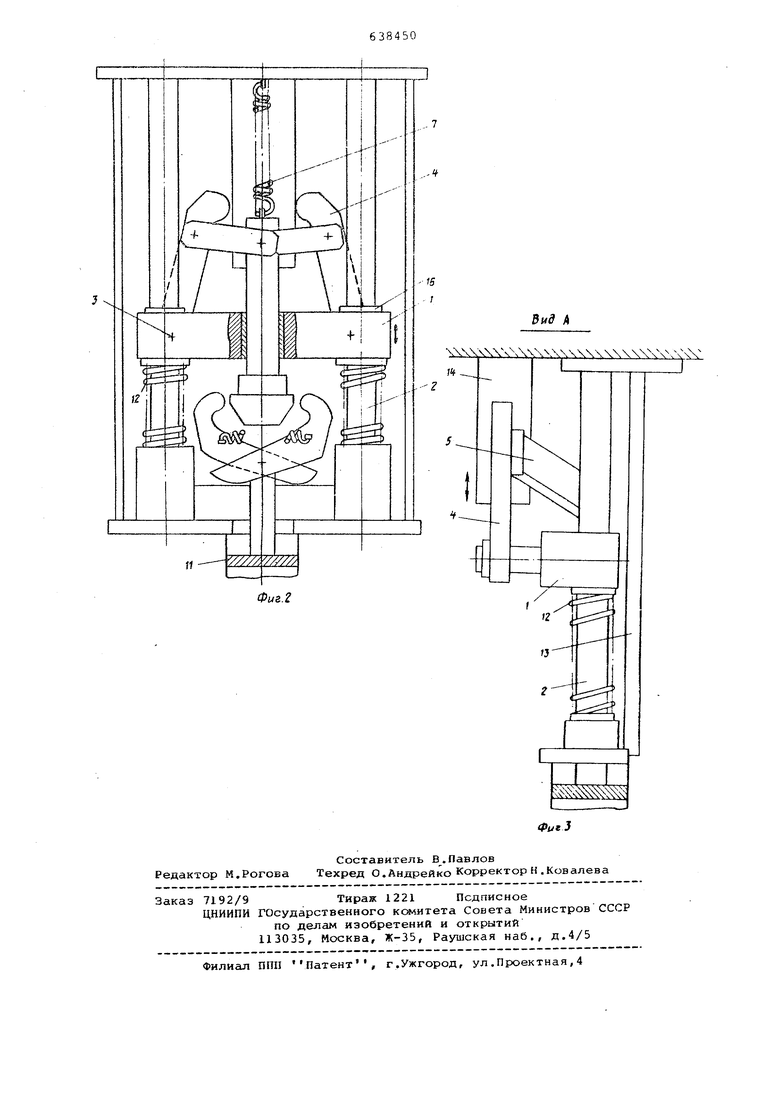
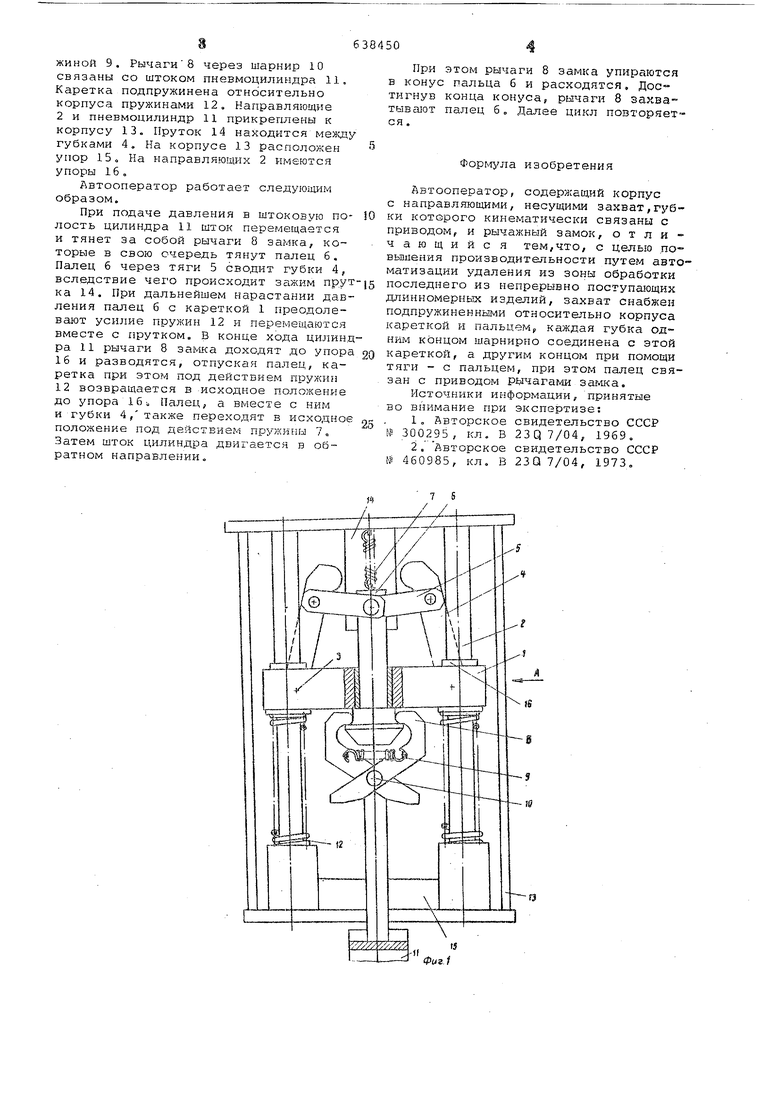
Изобретение относится к машиностроению, а именно к автооператорам для подачи заготовок к металлорежущим станкам. Известен автооператор, предназначенный для подачи заготовок к металлорежущим станкам, в котором на корпусе установлены поворотные механические руки с державками и захватами, выполненными перемещаемыми в эти державках l . Недостатками такого автооператора являются сложность конструкции вслед ствие прилегания нескольких силовых цилиндров, а также отсутствие возмож ности перемещения длинномерных заготовок. Наиболее близким к предлагаемому является автооператор, содержащий корпус с направляющими, несущими зах ват, губки которого кинематически связаны с приводом, и рычажный замок Однако в этом устройстве захват н обеспечивает возврат механизма без заготовки, что не позволяет осуществлять одностороннее поступательное движение длинномерной заготовки, необходимое для удаления готовой детал из рабочей зоны станка, снижая тем самым производительность. Целью изобретения является повышение производительности путем автоматизации удаления из зоны обработки последнего из непрерывно . поступающих длинномерных изделий. Это достигается тем, что захват снабжен подпружиненными относительно корпуса кареткой и пальцем, каждая губка одним концом шарнирно соединена с этой кареткой, а другим концом при помощи тяги - с пальцем, при этом палец связан с приводом рычагами замка. На фиг.1 изображен общий вид автооператора в исходном положении захвата; на фиг.2 - то же в конечном положении захвата; .на фиг.З - вид по стрелке А на фиг.1. Автооператор имеет каретку 1, расположенную на направляющих 2 корпуса. К каретке при помощи шарниров 3 одними своими концами присоединены губки 4 захвата, а вторыми концами с помощью тяг 5 они соединены шарнирно с пальцем 6, подпружиненным относительно корпуса пружиной 7. Палец 6 находится в зацеплении с рычагами 8 замка, связанными между собой пружиной 9. Рычаги8 через шарнир 10 связаны со штоком пневмоцилиндра 11. Каретка подпружинена относительно корпуса пружинами 12. Направляющие 2 и пневмоцилиндр 11 прикреплены к корпусу 13. Пруток 14 находится мелод губками 4. На корпусе 13 располокен упор 15 о На направляющих 2 имеются упоры 16 о Двтооператор работает следующим образом. При подаче давления в штоковую по лость цилиндра 11 шток перемещается и тянет за собой рычаги 8 замка, которые в свою очередь тянут палец 6, Палец б через тяги 5 сводит губки 4, вследствие чего происходит зажим пру ка 14. При дальнейшем нарастании дав ления палец 6 с кареткой 1 преодолеBaiOT усилие пружин 12 и перемещаются вместе с прутком. В конце хода цилин ра 11 рычаги 8 зам1са доходят до упор 16 и разводятся, отпуская палец, каретка при этом под действием пружин 12 возвращается в исходное положение до упора 16U Палец, а вместе с ним и губки 4,также переходят в исходно положение под действием пружины 7. Затем шток цилиндра двигается в обратном направлении.
Фиг-1 При этом рычаги 8 замка упираются в конус пальца б и расходятся. Достигнув конца конуса, рычаги 8 захватывают палец 6. Далее цикл повторяет ся. изобретения Автооператор, содержащий корпус с направляющими, несущими захват,губки которого кинематически связаны с приводом, и рычажный замок, отличающийся тем,что, с целью повышения производительности путем автоматизации удаления из зоны обработки последнего из непрерывно поступающих длинномерных изделий, захват снабжен подпружиненньз и относительно корпуса кареткой и пальцемf каждая губка одним концом шарнирно соединена с этой кареткой, а другим концом при помощи тяги - с пальцем, при этом палец связан с приводом рычагами замка. Источники информации, принятые во внимание при экспертизе: 1, Авторское свидетельство СССР № 300295, кл, В 23Q7/04, 1969. 2 . Авторское свидетельство СССР № 460985, кл. В 23Q 7/04, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Прокладчик заготовок | 1979 |
|
SU804169A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Робот | 1991 |
|
SU1781026A1 |
| Многооперационный станок для обработкидВЕРНыХ пОлОТЕН | 1980 |
|
SU852546A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |