Изобретение относится к машиностроению, а именно к автоматическим манипуляторам, осуществляющим подачу листового материала для резки на полосы и форматки строго заданного размера в полиграфической промышленности, а также для перекладки заготовок в штамповочном производстве или для подачи листового материала в зону действия гильотинных ножниц.
Известен перекладчик заготовок, содержащий привод поступательного перемещения, соединенный с рычажным четырехзвенником, направляющую и балку, в котором с целью снижения сложности изготовления в повышения износостойкости составляющих перекладчик звеньев, имеется смонтированная на направляющей и кинематически связанная с приводом поступательного перемещения каретка, на которой установлен рычажной четырехзвен- ник, выполненный с ограниченным углом качения рычагов, а также встроенное между
кареткой и направляющей тормозное устройство.
Существенными недостатками известного устройства являются
-невозможность подачи листового материала для резки с его предварительной ориентацией;
-значительная сложность кинематической схемы;
-большая стоимость устройства.
Известен также робот, содержащий руки и каретку с установленными на ней корпусами рук, в котором с целью расширения функциональных возможностей корпус каждой руки установлен на каретке с помощью двух пальцев, один из которых является осью вращения корпуса рук, а второй палец имеет расположенную в каретке эксцентричную относительно собственной оси вращения, размещенной в корпусе руки, часть.
Недостатками известного робота яйля- ются:
-невозможнрсть осуществления подачи листового материала для резки на посл
с
„«Д
ч
00
го
лосы или форматки с его предварительной ориентацией по отношению режущим ножам;
-сложность наладки и отладки устройства;
-устройство имеет сложную металлоемкую конструкцию, а следовательно, значительную стоимость.
Целью изобретения является упрощение конструкции устройства, расширение эксплуатационных возможностей его и повышение надежности фиксации заготовок. Все это приведет к повышению производительности устройства, снижению стоимости его.
Это достигается тем, что в устройство, содержащее захват, привод поступательного перемещения, закрепленный на основании,выполненномв виде пространственной сферы, и пульт управле- ния, введены корректирующий механизм, рабочая каретка, в которой установлен вакуумный схват с возможностью вращения в горизонтальной плоскости,и поступательного перемещения в вертикальной плоско- сти за счет пневмоцилиндра, направляющие, закрепленные на основании, ограничитель, установленный на штоке пневмоцилиндра поступательного перемещения, и стол с упором и подпружиненным прижимом. Механизм коррекции включает толкатели, шарнирно закрепленные на корпусе механизма, демпфирующую пружину. Корпус посредством роликов установлен на направляющих и соединен с штоком приво- да поступательного перемещения механизма. Вакуумный схват состоит из корпуса, который посредством роликов скользит по направляющим. Снаружи корпуса установлена планка, которая расположена перед ограничителем, установленным на штоке. Внутри корпуса посредством подшипникового узла закреплен вертикальный пневмо- цилиндр, на штоке которого установлена балка с пневмоприсосками. Подшипнике- вый узел установлен на салазках, которые перемещаются перпендикулярно направляющим. Перед основанием расположен стол, который необходим для направленного перемещения заготовок..
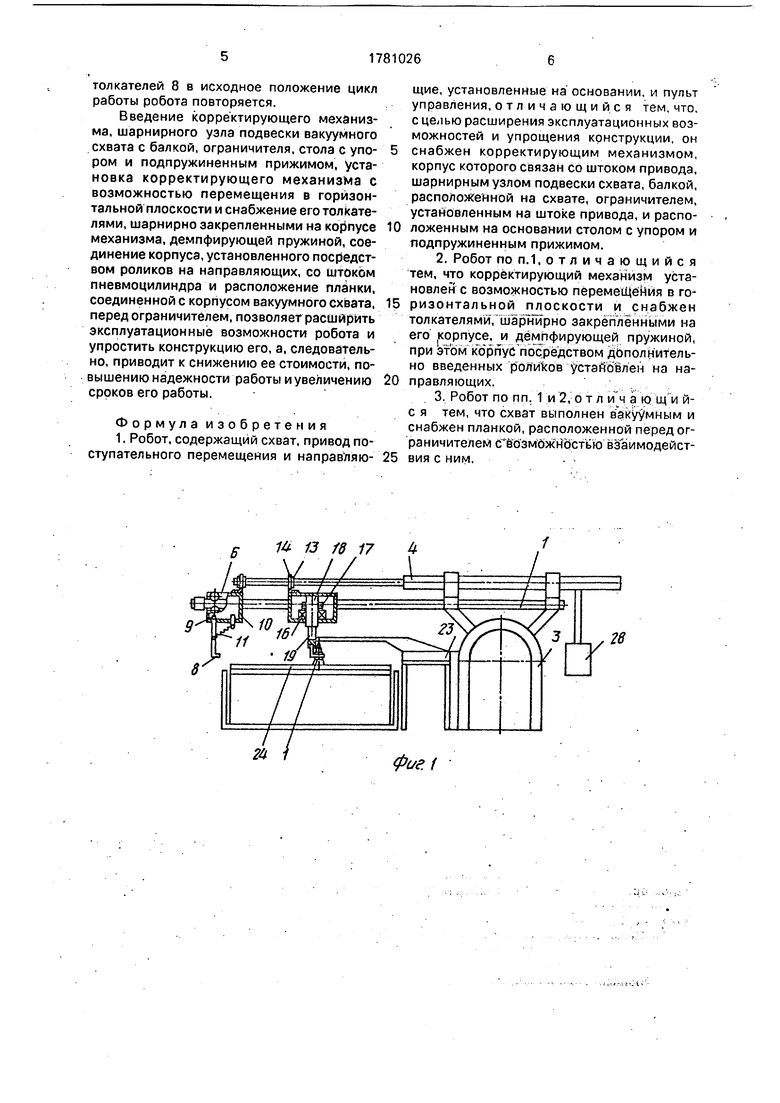
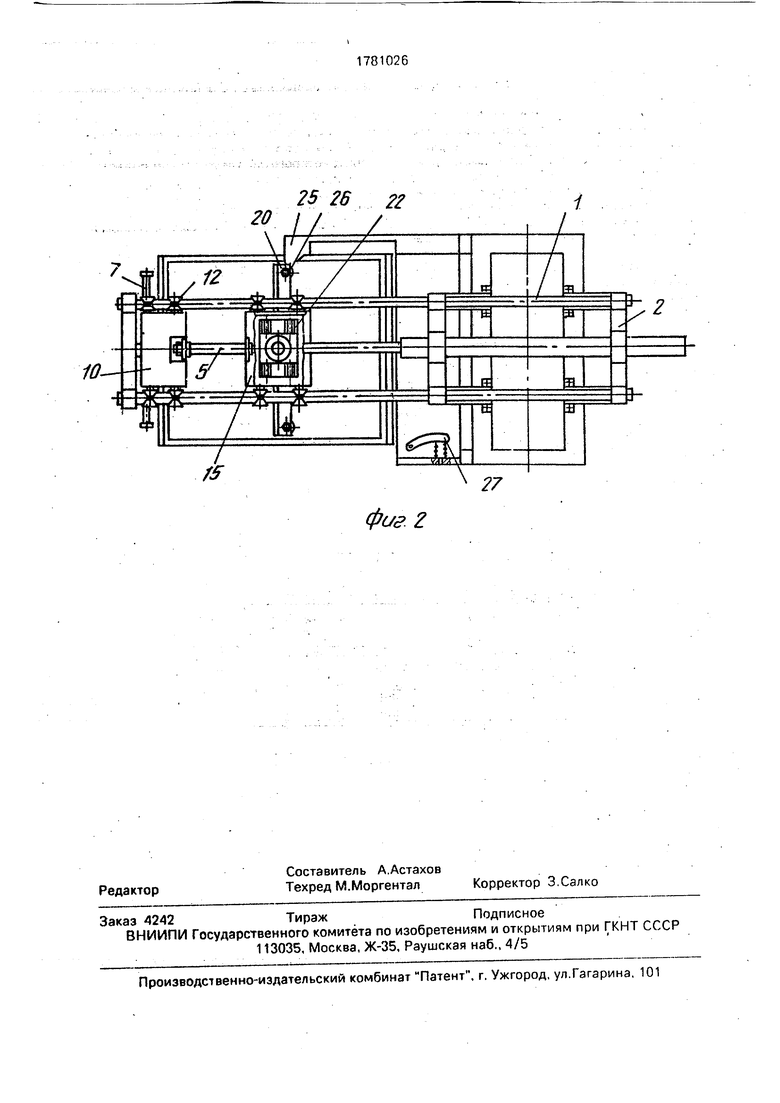
На фиг.1 показан общий вид устройства; на фиг.2 - то же, вид сверху.
Робот состоит из двух направляющих 1, соединенных тремя поперечинами 2, закрепленными на основании 3,выполненном в виде ферменной конструкции. Основание 3 при работе совместно со станком резки листового материала (не показан) крепится снаружи станка. На основании 3 неподвижно закреплен пневматический привод 4
двухстороннего действия, шток 5 которого соединен с корректирующим механизмом б, состоящим из стержня 7, на котором закреплены толкатели 8, шарнирно закрепленными посредством оси 9 на корпусе 10 механизма б, и демпфирующих пружин 11. Корпус 10 посредством роликов 12 установлен на направляющих 1. На штоке 5 установ- лен ограничитель 13, перед которым расположена планка 14. Она соединена с корпусом 15 вакуумного схвата 16. Корпус 15 посредством роликов 12 скользит по направляющим 1. Внутри корпуса 15 в подшипниковом узле 17 закреплен вертикальный пневматический цилиндр 18, на штоке 19 которого установлена балка 20 с присосками 21. Подшипниковый узел 17 установлен на салазках 22, на которых он перемещается перпендикулярно направляющим 1.
К основанию 3 прикреплен стол 23, по которому скользят заготовки 24 листового материала. На столе 23 установлен упор 25 с наклонным выступом 26 и подпружиненный прижим 27. Наклонный выступ 26 и прижим 27 контактируют с балкой 20 при перемещении корпуса 15. Управление работой робота производится с пульта управления 28.
Работа устройства заключается в следующем.
Собирается робот в комплексе со станком (не показан), осуществляющим резку (например, картона). Стол 23 располагается в месте подачи заготовок 24 в станок. По команде с пульта управления 28 срабатывает вакуумный схват 16. Он при помощи присосок 21 захватывает лист (например, картона). Пневматический цилиндр 18 посредством штока 19 приподнимает его до высоты расположения толкателей 8 корректирующего механизма 6. Включается пневматический привод 4, Шток 5 перемещает толкатели 8. Они перемещают заготовку 24 до режущей части станка. При движении заготовка 24 дополнительно ориентируется упором 25 и подпружиненным прижимом 27. Пневмоприсоски 21 отключаются перед касанием листов режущей части станка. После разделки заготовки 24 шток 5 перемещает толкатели 8 в исходное положение. При этом ограничитель 13 захватывает планку 14 и передвигает вакуумный схват 16.
При движении ограничителя 13 планка 14 перемещается и балка 20 посредством наклонного выступа 26 и подпружиненного прижима 27, вакуумного схвата 16 ориентируется и занимает исходное положение автоматически. После возвращения
толкателей 8 в исходное положение цикл работы робота повторяется.
Введение корректирующего механизма, шарнирного узла подвески вакуумного схвата с балкой, ограничителя, стола с упо- ром и подпружиненным прижимом, установка корректирующего механизма с возможностью перемещения в горизонтальной плоскости и снабжение ею толкателями, шарнирно закрепленными на корпусе механизма, демпфирующей пружиной, соединение корпуса, установленного посредством роликов на направляющих, со штоком пневмоцилиндра и расположение планки, соединенной с корпусом вакуумного схвата, перед ограничителем, позволяет расширить эксплуатационные возможности робота и упростить конструкцию его, а, следовательно, приводит к снижению ее стоимости, повышению надежности работы и увеличению сроков его работы.
Формула изобретения 1. Робот, содержащий схват, привод поступательного перемещения и направляю-
щие, установленные на основании, и пульт управления, отличающийся тем, что. с целью расширения эксплуатационных возможностей и упрощения конструкции, он снабжен корректирующим механизмом, корпус которого связан со штоком привода, шарнирным узлом подвески схвата, балкой, расположенной на схвате, ограничителем, установленным на штоке привода, и расположенным на основании столом с упором и подпружиненным прижимом.
2.Робот по п. 1,отличающийся тем, что корректирующий механизм установлен с возможностью перемещения в го- ризонтальной плоскости и снабжен толкателями, шарШрно закреплёнными на его корпусе, и демпфирующей пружиной, при этом корпус посредством дополнительно введенных роликов установлен на направляющих.
3.Робот по пп. 1 и 2, о т л а ю щ и й- с я тем, что схват выполнен вакуумным и снабжен планкой, расположенной перед ограничителем сТзозмож Яость ю взаимодействия с ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Установка для резки листового материала | 1986 |
|
SU1369876A1 |
| Линия многооперационной штамповки | 1987 |
|
SU1532153A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Устройство для отделения листовой заготовки от стопы и подачи в зону обработки | 1990 |
|
SU1816241A3 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
Использование: в машиностроении, в частности в автоматических манипуляторах, применяемых для подачи листового материала. Устройство снабжено корректирующим механизмом, установленным с возможностью перемещения в горизонтальной плоскости и имеющим толкатели 8, шарнирно закрепленные на корпусе 10 механизма, и демпфирующую пружину 11. Корпус 10 соединен со штоком привода 4 и посредством роликов установленные направляющих 1. Схват 16 выполнен вакуумным и снабжен планкой 14, расположенной перед ограничителем 13 с возможностью взаимодействия с ним. 2 з.п. ф-лы, 2 ил.
с 16 13 fd 17 4
LJJL
24
фие.1
25 26 22 20 / //
Хгтд
/
У
фиг 2
| Робот | 1979 |
|
SU772842A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
