Известны дистанционные глубиномеры для оиредсления глубины погружения объекта, в которых гидростатическое давление измеряется струнным методом, a связь датчика с приемной частью прибора осуществлена с помощью кабеля. Однако такие приборы не обеспечивают точность показаний.
В описываемом приборе повыщение точности и стабильности показаний достигнуто тем, что датчик связан с приемником не с помощью кабеля, .а по гидроакустическому каналу.
С этой целью для преобразования колебаний струны, усиленных умножителем частоты, на выходе прибора установлен электроакустический преобразователь.
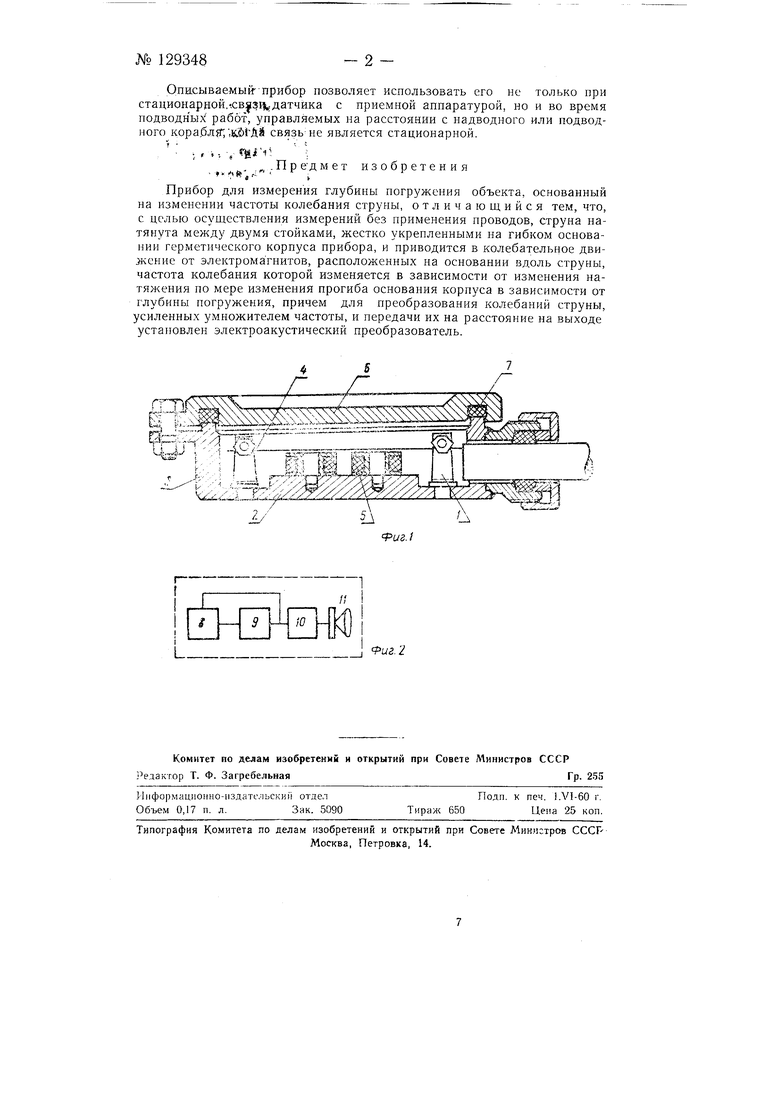
На фиг. 1 изображен датчик прибора в разрезе; па фиг. 2 - блоксхема прибора.
Между двумя стойками 1, жестко укрепленными в середине гибкого основания 2 герметического корпуса 3, натянута струна 4, приводимая в колебательное движение от электромагнитов 5, расположенных на основании 2 вдоль струны 4. Корпус 3 закрывается крыщкои 6 с уплотнительной прокладкой 7.
На объекте устанавливают в герметическом корпусе датчик 8 с генератором 9, представляющий собой усилитель, вход и выход которого замкнуты па катушке электромагнитов 5; умножитель 10 частоты, позволяющий увеличивать в необходимое число раз частоту переменного тока, даваемого генератором 9; электроакустический преобразователь 11 и блок питания.
На обеспечивающем корабле устанавливают приемную аппаратуру, состоящую из гидрофона и измерителя частоты с показывающим np i6opoM.
Описываемый--прибор позволяет использовать его не только при стационарной..св зк датчика с приемной аппаратурой, но и во время подводных работ, управляемых на расстоянии с надводного или подводного корабле, связьч1е является стационарной.
.
, .Предмет изобретения
. г. ,й;,-:,.
Прибор для измерения глубины погружения объекта, основанный на изменении частоты колебания струны, отличающийся тем, что, с целью осуществления измерений без применения проводов, струна патянута между двумя стойками, жестко укрепленными на гибком основании герметического корпуса прибора, и приводится в колебательное движение от электромагпитов, расположенных на основании вдоль струны, частота колебания которой изменяется в зависимости от изменения натяжения по мере изменения прогиба основания корпуса в зависимости от глубины погружения, причем для преобразования колебаний струны, усиленных умножителем частоты, и передачи их на расстояние на выходе установлен электроакустический преобразователь.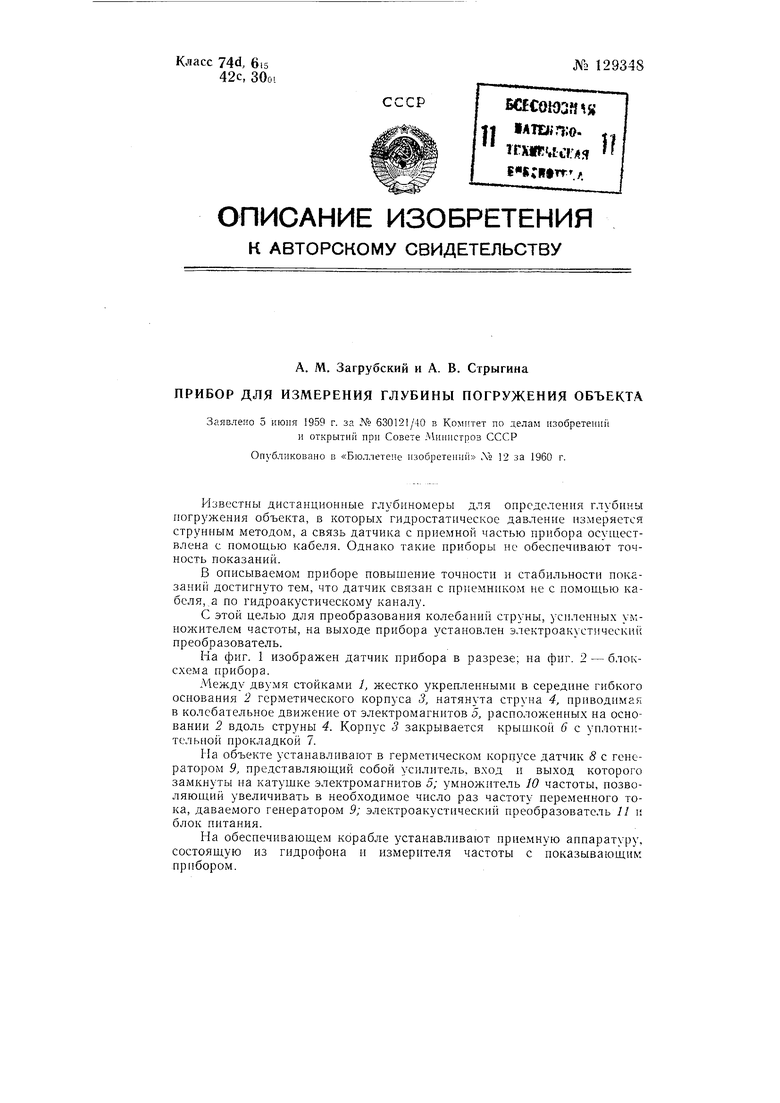
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для измерения подъемной силы судоподъемных понтонов | 1950 |
|
SU101965A1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
| СПОСОБ ПОИСКА РАДИОАКТИВНЫХ ОБЪЕКТОВ ПОД ВОДОЙ И КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2420762C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ СРЕДЫ РЕАКТИВНЫМ СНАРЯДОМ СО ВЗРЫВНЫМ ИСТОЧНИКОМ ЗВУКА (ВАРИАНТЫ) | 2009 |
|
RU2397916C1 |
| Телеметрическая система для определения и регистрации глубины погружения и других параметров буксируемого металлическим тросом подводного объекта | 1964 |
|
SU485914A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 1992 |
|
RU2112316C1 |
