Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для управления положением транспортера-загрузчика картофеля.
Целью изобретения является упрощение конструкции.
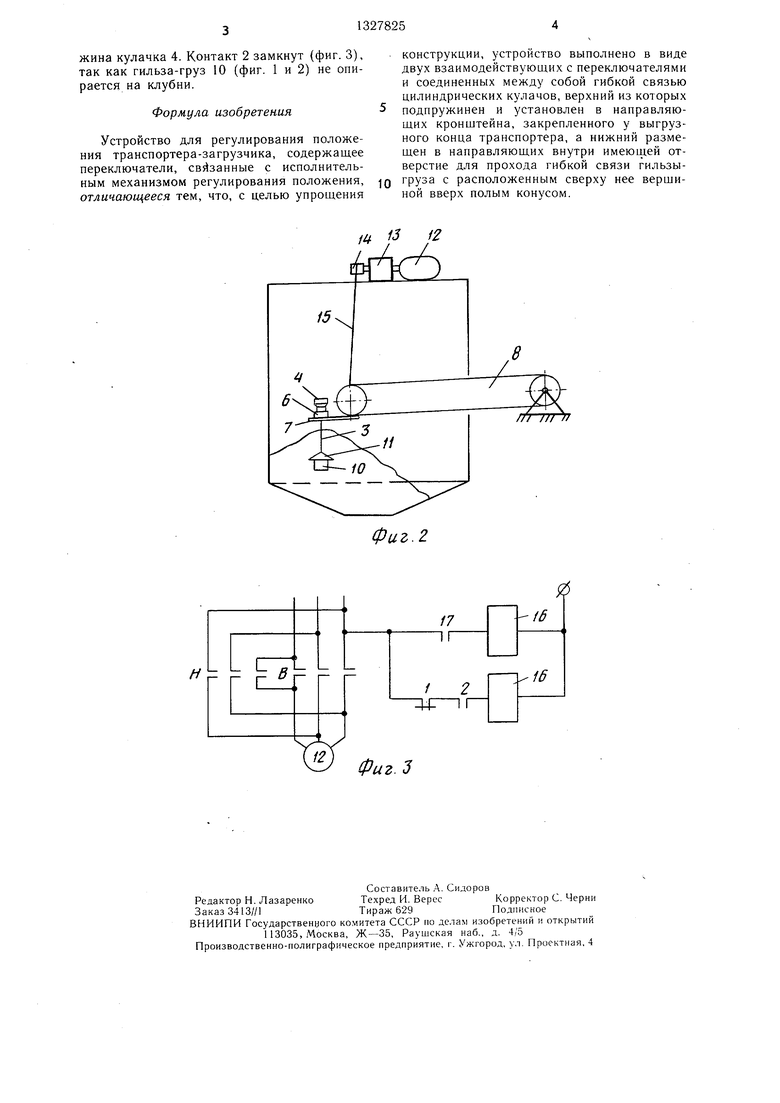
На фиг. изображена конструктивная схема устройства для регулирования положения транспортера-загрузчика картофеля; на фиг. 2 - схема транспортера для за- грузки бункера-накопителя с приводом и креплением устройства для регулирования его положения; на фиг. 3 - принципиальная электрическая сх.ема включения концевых выключателей и упрощенная схема управления транспортером.
Устройство для регулирования положе ния транспортера-загрузчика картофеля содержит два взаимодействующих с переключателями 1 и 2 и соединенных между собой гибкой связью 3 цилиндрических кулачка 4 и 5, верхний 4 из которых подпружинен и установлен в направлющих б кронштейна 7, закрепленного у выгрузного конца транспортера 8, а нижний 5 размещен в направляющих внутри имеющей отверстие 9 для прохода гибкой связи 3 гильзы-груза 10, с распо.ложенным сверху нее вершиной вверх полым конусом - парусом П.
Транспортер 8 закреплен на горизонтальной оси и может поворачиваться вокруг нее 1ри помощи исполнительного механизма регулирования положения, состояще1-о из электродвигателя 12, редуктора 13, барабана 14 и троса 15. Исполнительный механизм может быть выполнен и на основе других конструкций, например, на основе гидросис;- темы.
Цепь управления электродвигателем 12 содержит реверсивный пускатель 16 с обмотками В - верх и Н - низ. Управление трапспортера 8 осуществляется через контакт 17, на который воздействует автоматическое устройство (не показано).
Устройство для регулирования положе- ния транспортера-загрузчика картофеля устанавливается на кронн тейпе 7 у выгрузного конца транспортера 8 так, что парус 11 и ги.чьза-груз 10 повисают па гибкой связи 3, длина которой выби)ается таким обра- зом, чтобы, при автоматическом подъеме транспортера 8 иарус 11 и гильза-груз 10 находились в массе картофеля, н составляет 20-40 см. Характеристики пружины кулачка 4 выбираются таким образом, что если па парус 11 не действуют сверху клуб1п-1, кулачок 4 находится в верхнем положении и не действует на штифт переклю- чате.дя 1. Массы гильзы-груза 10 и кулачка 5 выбирают исходя из того, что если гильза- груз 10 не находится внутри насыпи картофеля и не опирается основанием на но- верхность, кулачок 5 находится в верхнем положении но отношению к гильзе-грузу К) и воздейсч вует на нп ифт переключате.1Я 2.
Е:сли гильза-груз 10 опирается на поверхность или клуб ни, то кулачок 5 перемещается вниз и штифт переключателя 2 освобождается. Цри этом происходит переключение его цепей.
Устройство для регулирования положения транспортера-загрузчика картофеля функционирует следующим образом.
При увеличении насыпи, например, в бункере-накопителе транспортер 8 перемещается вверх, управляемый другим устройством управления. Так как парус 11 находится в массе картофеля, то при перемещении транспортера 8 вверх за счет воздействия клубней на парус 11 создается дополнительное усилие, которое передается гибкой связью 3 кулачку 4. За счет этого усилия кулачок 4, преодолевая усилие пружины, воздействует на штифт переключателя 1. В таком положении кулачок 4 и переключатель 1 находятся до тех пор, пока парус 11 находится в массе картофеля.
Кулачок 5 в этом случае находится в верхнем положении относительно гильзы-груза 10, так как гибкая связь 3 все время стремится поднять его и гильзу-груз 10. В таких положениях концевые переключатели и 2 не иодают команду на исполнительный механизм и он за счет другого устройства управления обеспечивает автоматическое перемещение транспортера вверх при возрастании насыпи картофеля.
Если уровень насыпи картофеля уменьшится, например, если произойдет выгрузка картофеля из бункера-накопителя, то парус 11 и другие э;1ементы устройства выходят из насыпи картофеля и повисают на гибкой связи 3. В момент выхода паруса 11 из насыпи картофеля сопротивление его перемен1,ени;0 в насыпи картофеля исчезает, уменыиается усилие, передаваемое по гибкой связи 3 кулачку 4. Под действием кулачок 4 поднимается, освобождая П1ТИФТ переключателя , который подает команду па опускание транспортера 8. Когда выгрузпой конец TpaiicnopTepa 8 опустится до уровня, при котором |-ильза-груз 0 начинает опираться па насыпь или на дно бункера, перемещение ее п.рекращается, а кулачок 5 продо. опускаться внутри гильзы-груза 10. Когда кулачок 5 опустится на величину,- при которой штифт переключателя 2 освобождается, переключатель 2 подает команду па прекращение опускания транспортера 8.
Управление подъемом транспортера 8 при 1юзрастанпп насьп1и картофеля осуществляется через контакт 17, на который действует автоматическое устройство (не показано). Контакты переключателей 1 и 2 включены последовательпо, при этом контакт 1 при автоматическом подъеме транспортера 8 разомкнут, так как в этом случае на парус 11 действует усилие картофеля и пружина кулачка 4. Контакт 2 замкнут (фиг. 3), так как гильза-груз 10 (фиг. 1 и 2) не опирается на клубни.
Формула изобретения
Устройство для регулирования положения транспортера-загрузчика, содержащее переключатели, связанные с исполнительным механизмом регулирования положения, отличающееся тем, что, с целью упрощения
конструкции, устройство выполнено в виде двух взаимодействующих с переключателями и соединенных между собой гибкой связью цилиндрических кулачов, верхний из которых подпружинен и установлен в направляющих кронщтейна, закрепленного у выгрузного конца транспортера, а нижний размещен в направляющих внутри имеющей отверстие для прохода гибкой связи гильзы- груза с расположенным сверху нее верщи- ной вверх полым конусом.
/ i3
Фиг.2
17
б
н
1 2
16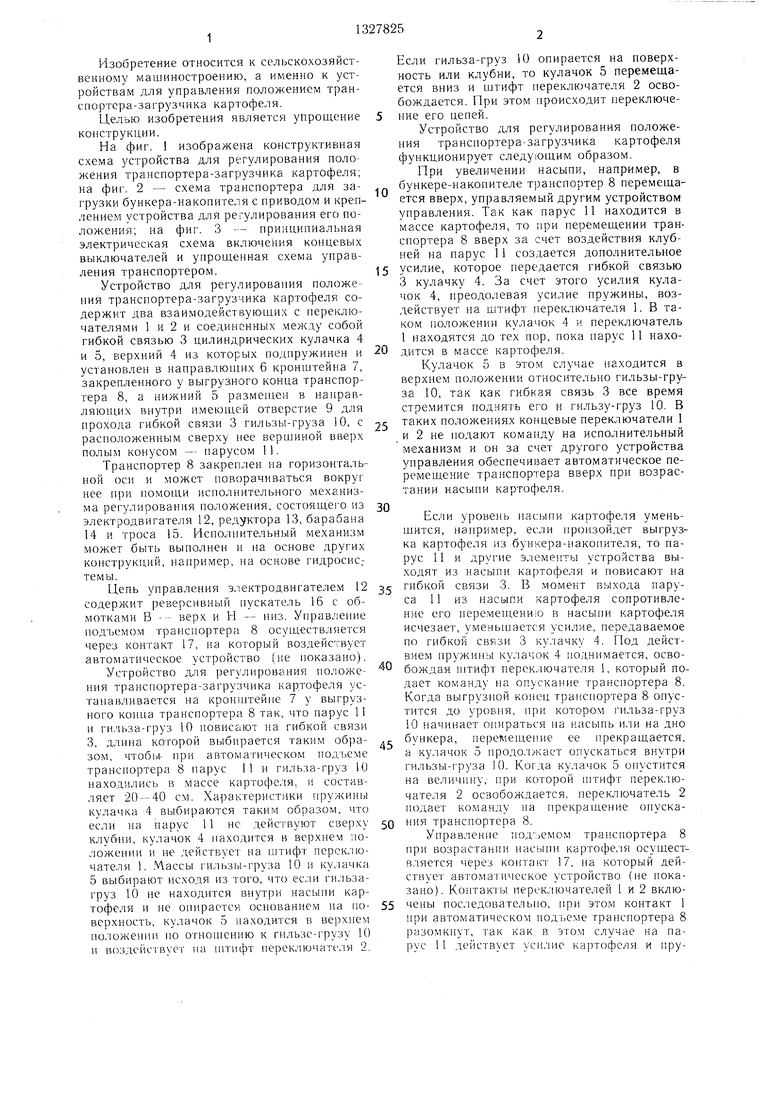
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления транспортером-загрузчиком картофеля | 1985 |
|
SU1296047A1 |
| Устройство для регулирования положения транспортера загрузчика картофеля | 1983 |
|
SU1155236A1 |
| Устройство автоматического управления транспортером-загрузчиком картофеля | 1989 |
|
SU1776367A1 |
| Датчик уровня | 1990 |
|
SU1797794A1 |
| Система автоматического управления загрузкой картофеля из бункера в автотранспорт | 1990 |
|
SU1755782A1 |
| Чувствительный элемент положения транспортера-загрузчика картофеля | 1989 |
|
SU1776365A2 |
| Устройство для загрузки сыпучих грузов в емкости | 1989 |
|
SU1818290A1 |
| Передвижной ленточный конвейер | 1985 |
|
SU1326509A1 |
| КАРТОФЕЛЕХРАНИЛИЩЕ | 1990 |
|
RU2019951C1 |
| Поворотное сиденье транспортера-загрузчика | 1984 |
|
SU1162635A1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройства.м для управления положением транспортера - разгрузчика картофеля. Цельк1 jiiujopo 0;:пн Я ;ляегся х ирошение конСТруКШ. iipll пр;:в. iSiCMOM Л.р 1 НМ УСТpoi OTiiOM 1и1Д ьол;г TiiaiiCiiop unia нслед за возрастающей MaChiLbio 11ол1-)|1 - парус перелк- ;;- С ;v:-; в ::icce каргофо,1И. за счет чего :;оз;; аегся . ;i:e. передаваемое гиб6 Л1 yA ri:/}t t- (Л 00 bO 00 ю ел
Фиг.З
| Устройство для регулирования положения транспортера загрузчика картофеля | 1983 |
|
SU1155236A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для автоматического регулирования высоты выгрузного транспортера | 1982 |
|
SU1093282A1 |
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
