Изобретение относится к устройствам для транспортирования насыпных грузов и формирования .отвалов и насыпей.
Цель изобретения - повыихение надеж- .ности работы.
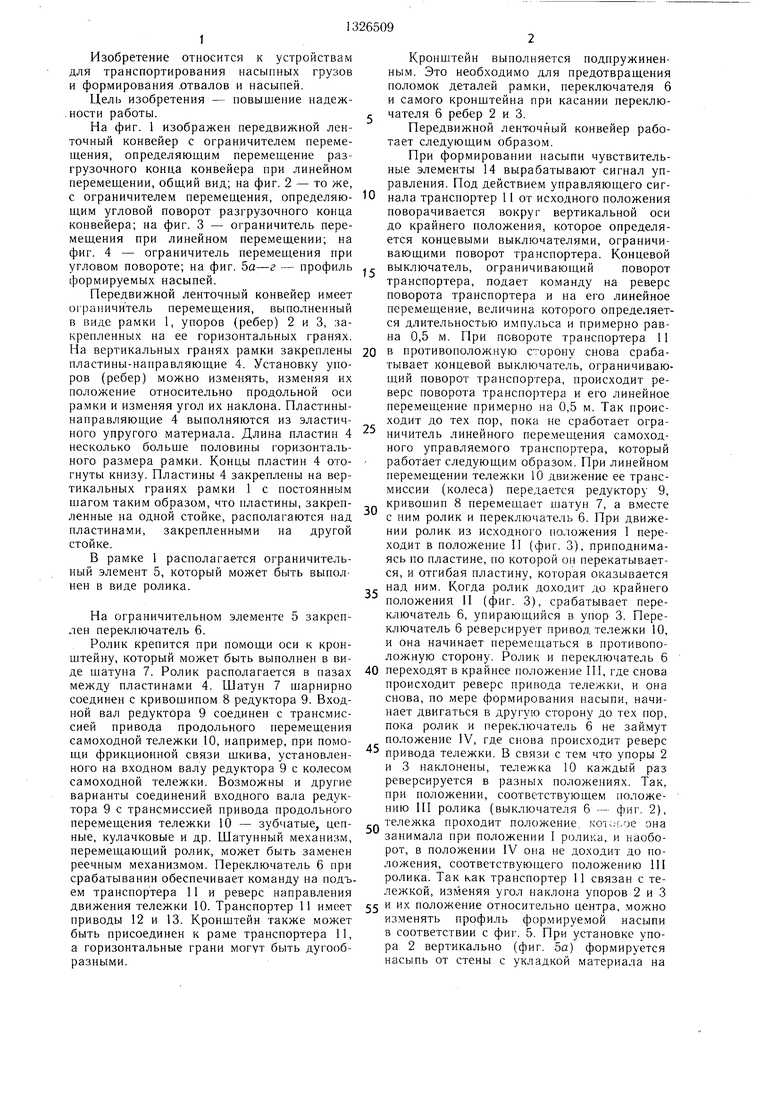
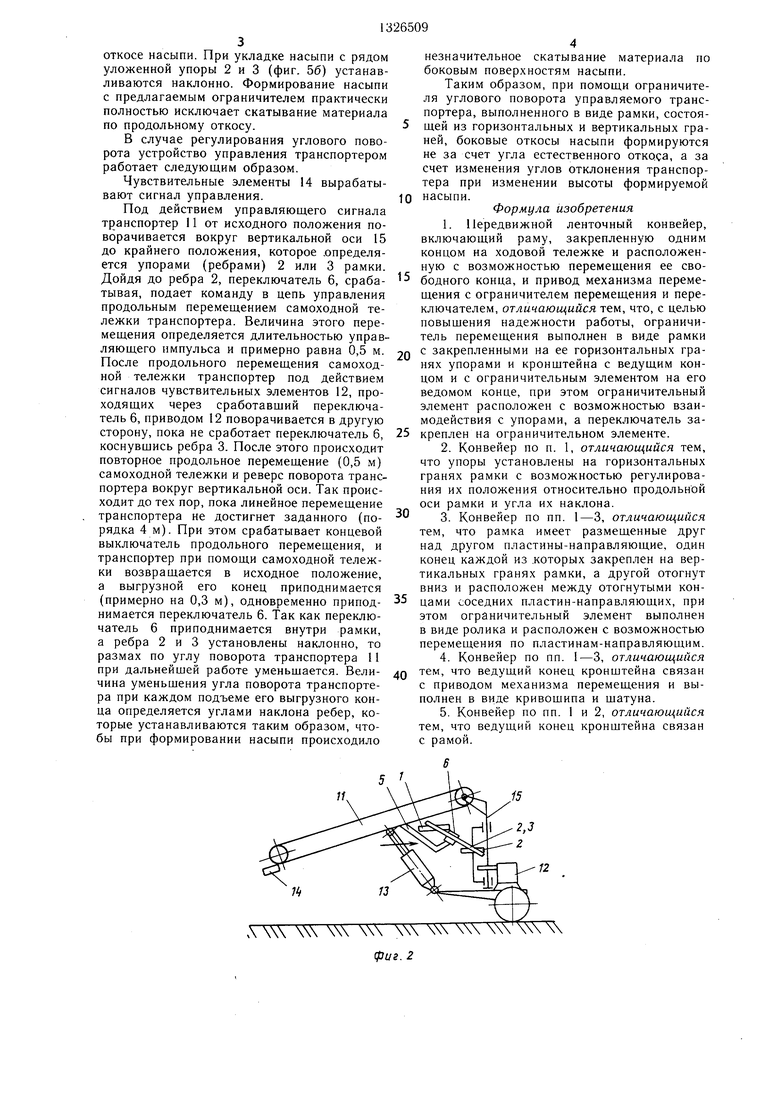
На фиг. 1 изображен передвижной ленточный конвейер с ограничителем перемещения, определяющим перемещение разгрузочного конца конвейера при линейном перемещении, общий вид; на фиг. 2 - то же, с ограничителем перемещения, определяющим угловой поворот разгрузочного конца конвейера; на фиг. 3 - ограничитель перемещения при линейном перемещении; на фиг. 4 - ограничитель перемещения при угловом повороте; на фиг. 5а-г - профиль формируемых насыпей.
Передвижной ленточный конвейер имеет ограничитель перемещения, выполненный в виде рамки 1, упоров (ребер) 2 и 3, закрепленных на ее горизонтальных гранях. На вертикальных гранях рамки закреплены 20 пластины-нанравляющие 4. Установку упоров (ребер) можно изменять, изменяя их положение относительно продольной оси рамки и изменяя угол их наклона. Пластины- направляющие 4 выполняются из эластичного упругого материала. Длина пластин 4 несколько больще половины горизонтального размера рамки. Концы пластин 4 отогнуты книзу. Пластины 4 закреплены на вертикальных гранях рамки 1 с постоянным шагом таким образом, что пластины, закрепленные на одной стойке, располагаются над пластинами, закрепленными на другой стойке.
В рамке 1 располагается ограничительный элемент 5, который может быть выполнен в виде ролика.
На ограничительном элементе 5 закреплен переключатель 6.
Ролик крепится при помощи оси к крон- щтейну, который может быть выполнен в виде щатуна 7. Ролик располагается в пазах между пластинами 4. Шатун 7 шарнирно соединен с кривошипом 8 редуктора 9. Входной вал редуктора 9 соединен с трансмиссией привода продольного перемещения самоходной тележки 10, например, при помоКронш:тейн ыполняется подпружиненным. Это необходимо для предотвращения поломок деталей рамки, переключателя б и самого кронщтейна при касании переклюг чателя 6 ребер 2 и 3.
Передвижной ленточйый конвейер работает следующим образом.
При формировании насыпи чувствительные элементы 14 вырабатывают сигнал управления. Под действием управляющего сиг10 нала транспортер 11 от исходного положения поворачивается вокруг вертикальной оси до крайнего положения, которое определяется концевыми выключателями, ограничивающими поворот транспортера. Концевой выключатель, ограничивающий поворот транспортера, подает команду на реверс поворота транспортера и на его линейное перемещение, величина которого определяет ся длительностью импульса и примерно равна 0,5 м. При повороте транспортера 11 в противоположную сторону снова срабатывает концевой выключатель, ограничиваю щий поворот транспортера, происходит реверс поворота транспортера и его линейное перемещение примерно на 0,5 м. Так происходит до тех пор, пока не сработает ограничитель линейного перемещения самоходного управляемого транспортера, который работает следующим образом. При линейном перемещении тележки 10 движение ее трансмиссии (колеса) передается редуктору 9, кривошип 8 перемещает шатун 7, а вместе с ним ролик и переключатель 6. При движении ролик из исходного положения I переходит в положение П (фиг. 3), приподнимаясь по пластине, по которой он перекатывается, и отгибая пластину, которая оказывается
.. над ним. Когда ролик доходит до крайнего положения 11 (фиг. 3), срабатывает переключатель 6, упирающийся в упор 3. Переключатель 6 реверсирует привод тележки 10, и она начинает перемещаться в противоположную сторону. Ролик и переключатель 6
40 переходят в крайнее положение III, где снова происходит реверс привода тележки, и она снова, по мере формирования насыпи, начинает двигаться в другую сторону до тех пор, пока ролик и переключатель б не займут положение V, где снова происходит реверс
25
30
,СЛ. 1УД WAUA l - IVJ nClltJJr.mCp, IJJjrt , ., -
ЩИ фрикционной связи щкива, установлен-привода тележки. В связи с тем что упоры 2
ного на входном валу редуктора 9 с колесом самоходной тележки. Возможны и другие варианты соединений входного вала редуктора 9 с трансмиссией привода продольного перемещения тележки 10 - зубчатые, цепные, кулачковые и др. Шатунный механизм, перемещающий ролик, может быть заменен реечным механизмом. Переключатель 6 при срабатывании обеспечивает команду на подъем транспортера 11 и реверс направления движения тележки 10. Транспортер 11 имеет приводы 12 и 13. Кронщтейн также может быть присоединен к раме транспортера 11, а горизонтальные грани могут быть дугообразными.
и 3 наклонены, тележка 10 каждый раз реверсируется в разных положениях. Так, при положении, соответствующем положению III ролика (выключателя 6 - фиг. 2), тележка проходит положение, .кот.:;;:.ое она занимала при положении I ролика, и наоборот, в положении IV она не доходит до положения, соответствующего положению 111 ролика. Так как транспортер 11 связан с тележкой, изменяя угол наклона упоров 2 и 3 55 и их положение относительно центра, можно изменять профиль формируемой насыпи в соответствии с фиг. 5. При установке упора 2 вертикально (фиг. 5а) формируется насыпь от стены с укладкой материала на
0
Кронш:тейн ыполняется подпружиненным. Это необходимо для предотвращения поломок деталей рамки, переключателя б и самого кронщтейна при касании переключателя 6 ребер 2 и 3.
Передвижной ленточйый конвейер работает следующим образом.
При формировании насыпи чувствительные элементы 14 вырабатывают сигнал управления. Под действием управляющего сигнала транспортер 11 от исходного положения поворачивается вокруг вертикальной оси до крайнего положения, которое определяется концевыми выключателями, ограничивающими поворот транспортера. Концевой выключатель, ограничивающий поворот транспортера, подает команду на реверс поворота транспортера и на его линейное перемещение, величина которого определяется длительностью импульса и примерно равна 0,5 м. При повороте транспортера 11 в противоположную сторону снова срабатывает концевой выключатель, ограничивающий поворот транспортера, происходит реверс поворота транспортера и его линейное перемещение примерно на 0,5 м. Так происходит до тех пор, пока не сработает ограничитель линейного перемещения самоходного управляемого транспортера, который работает следующим образом. При линейном перемещении тележки 10 движение ее трансмиссии (колеса) передается редуктору 9, кривошип 8 перемещает шатун 7, а вместе с ним ролик и переключатель 6. При движении ролик из исходного положения I переходит в положение П (фиг. 3), приподнимаясь по пластине, по которой он перекатывается, и отгибая пластину, которая оказывается
. над ним. Когда ролик доходит до крайнего положения 11 (фиг. 3), срабатывает переключатель 6, упирающийся в упор 3. Переключатель 6 реверсирует привод тележки 10, и она начинает перемещаться в противоположную сторону. Ролик и переключатель 6
0 переходят в крайнее положение III, где снова происходит реверс привода тележки, и она снова, по мере формирования насыпи, начинает двигаться в другую сторону до тех пор, пока ролик и переключатель б не займут положение V, где снова происходит реверс
5
0
, ., -
привода тележки. В связи с тем что упоры 2
привода тележки. В связи с тем что упоры 2
и 3 наклонены, тележка 10 каждый раз реверсируется в разных положениях. Так, при положении, соответствующем положению III ролика (выключателя 6 - фиг. 2), тележка проходит положение, .кот.:;;:.ое она занимала при положении I ролика, и наоборот, в положении IV она не доходит до положения, соответствующего положению 111 ролика. Так как транспортер 11 связан с тележкой, изменяя угол наклона упоров 2 и 3 5 и их положение относительно центра, можно изменять профиль формируемой насыпи в соответствии с фиг. 5. При установке упора 2 вертикально (фиг. 5а) формируется насыпь от стены с укладкой материала на
откосе насыпи. При укладке насыпи с рядом уложенной упоры 2 и 3 (фиг. 56) устанавливаются наклонно. Формирование насыпи с предлагаемым ограничителем практически полностью исключает скатывание материала по продольному откосу.
В случае регулирования углового поворота устройство управления транспортером работает следующим образом.
Чувствительные элементы 14 вырабатывают сигнал управления.
Под действием управляющего сигнала транспортер 11 от исходного положения поворачивается вокруг вертикальной оси 15 до крайнего положения, которое .определяется упорами (ребрами) 2 или 3 рамки. Дойдя до ребра 2, переключатель 6, сраба- тывая, подает команду в цепь управления продольным перемещением самоходной тележки транспортера. Величина этого перемещения определяется длительностью управляющего импульса и примерно равна 0,5 м. После продольного перемещения самоходной тележки транспортер под действием сигналов чувствительных элементов 12, проходящих через сработавщий переключатель 6, приводом 12 поворачивается в другую сторону, пока не сработает переключатель 6, коснувщись ребра 3. После этого происходит повторное продольное перемещение (0,5 м) самоходной тележки и реверс поворота транспортера вокруг вертикальной оси. Так происходит до тех пор, пока линейное перемещение транспортера не достигнет заданного (по- рядка 4 м). При этом срабатывает концевой выключатель продольного перемещения, и транспортер при помощи самоходной тележки возвращается в исходное положение, а выгрузной его конец приподнимается (примерно на 0,3 м), одновременно припод- нимается переключатель 6. Так как переключатель 6 приподнимается внутри рамки, а ребра 2 и 3 установлены наклонно, то размах по углу поворота транспортера 11 при дальнейшей работе уменьшается. Вели- чина уменьщения угла поворота транспортера при каждом подъеме его выгрузного конца определяется углами наклона ребер, которые устанавливаются таким образом, чтобы при формировании насыпи происходило
незначительное скатывание материала по боковым поверхностям насыпи.
Таким образом, при помощи ограничителя углового поворота управляемого транспортера, выполненного в виде рамки, состоящей из горизонтальных и вертикальных граней, боковые откосы насыпи формируются не за счет угла естественного откоса, а за счет изменения углов отклонения транспортера при изменении высоты формируемой насыпи.
Формула изобретения
1.Передвижной ленточный конвейер, включающий раму, закрепленную одним концом на ходовой тележке и расположенную с возможностью перемещения ее свободного конца, и привод механизма перемещения с ограничителем перемещения и переключателем, отличающийся тем, что, с целью повыщения надежности работы, ограничитель перемещения выполнен в виде рамки с закрепленными на ее горизонтальных гранях упорами и кронштейна с ведущим концом и с ограничительным элементом на его ведомом конце, при этом ограничительный элемент расположен с возможностью взаимодействия с упорами, а переключатель закреплен на ограничительном элементе.
2.Конвейер по п. 1, отличающийся тем, что упоры установлены на горизонтальных гранях рамки с возможностью регулирования их положения относительно продольной оси рамки и угла их наклона.
3.Конвейер по пп. 1-3, отличающийся тем, что рамка имеет размещенные друг над другом пластины-направляющие, один конец каждой из .которых закреплен на вертикальных гранях рамки, а другой отогнут вниз и расположен между отогнутыми концами соседних пластин-направляющих, при этом ограничительный элемент выполнен в виде ролика и расположен с возможностью перемещения по пластинам-направляющим.
4.Конвейер по пп. I-3, отличающийся тем, что ведущий конец кронштейна связан с приводом механизма перемещения и выполнен в виде кривошипа и шатуна.
5.Конвейер по пп. 1 и 2, отличающийся тем, что ведущий конец кронштейна связан с рамой.
;/
15
12
фиг. 2
Ж I
JT Д
фие. 3
Форпаоанхи ,t,iunpos,uj,
насыпи
фиг.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления транспортером-загрузчиком картофеля | 1985 |
|
SU1296047A1 |
| УСТРОЙСТВО МЕХАНИЗИРОВАННОЙ РАСКЛАДКИ ШПАЛ НА БАЛЛАСТНУЮ ПРИЗМУ | 2017 |
|
RU2671793C1 |
| Поточная линия для конечной отделки текстильных полотен | 1985 |
|
SU1326687A1 |
| Машина для кладки кирпича | 1974 |
|
SU962551A1 |
| Кормораздатчик | 1986 |
|
SU1387931A1 |
| УСОВЕРШЕНСТВОВАННОЕ УСТРОЙСТВО МЕХАНИЗИРОВАННОЙ РАСКЛАДКИ ЖЕЛЕЗНОДОРОЖНЫХ ШПАЛ НА БАЛЛАСТНЫЙ СЛОЙ | 2020 |
|
RU2745765C1 |
| Установка для транспортирования паковок, например ленты, намотанной на катушки, от чесальных к ленточным машинам, а от последних к ровничным и прядильным машинам | 1960 |
|
SU135003A1 |
| Конвейер для складов напольного хранения зерна | 1982 |
|
SU1065310A1 |
| Устройство автоматического управления транспортером-загрузчиком картофеля | 1989 |
|
SU1776367A1 |
| Кантователь для штучных изделий | 1986 |
|
SU1377229A1 |

Изобретение относится к устройствам для транспортирования насыпных грузов и формирования отвалов и насыпей. Конвейер включает на ходовой тележке 10 раму и привод механизма перемещения с ограничителем перемещения и переключателем. Ограничитель перемещения выполнен в виде рамки 1 с закрепленными на ее горизонтальных гранях упорами 2 и 3 и кронщтейна. Последний может быть выполнен в виде щатуна 7. В рамке 1 расположен ограничительный элемент 5, например, в виде ролика, расположенного с возможностью взаимодействия с упорами 2, 3. На ограничительном элементе 5 закреплен переключатель 6. Рамка 1 имеет размещенные одна над другой пластины - направляющие 4, один конец каждой из которых закреплен на ее вертикальных гранях, а другой отогнут вниз и расположен между отогнутыми концами соседних пластин - направляющих 4. Изменяя угол наклона упоров 2, 3 и их положения относительно центра, можно изменять профиль формируемой насыпи. Чувствительные элементы 14 вырабатывают сигналы управления. 4 3. п. ф-лы, 5 ил. (Л п 256 3 f 7 8 Ю СО N0 о: СП О со ,V/ фиг, 1
/
Составитель М. Ляпина
Техред И. ВересКорректор В. Гирняк
Тираж 776Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| Способ формирования противофильтрационного барьера для хранилищ радиоактивных отходов | 2021 |
|
RU2757782C1 |
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Приспособление для строгания деревянных полов, устраняющее работу на коленях | 1925 |
|
SU1956A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЛЕНТОЧНЫМ | 0 |
|
SU407050A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
