Изобретение относится к робототехнике и может быть использовано при создании копирующих манипуляторов.
Цель изобретения - упрощение и повышение динамической точности устройства за счет исключения датчиков давления.
На чертеже изображена функциональная схема следящей системы двустороннего действия.
Система содержит задающий 1 и ис- полнительньш 2 следящие приводы, бло 3 интегрирования, первый 4 и второй
5регуляторы, исполнительные части
6и 7, преобразователь 8 тока, двигатель 9, электрогидропреобразовател 10, гидродвигатель 11, первый 12 и второй 13 датчики положения, сумма- тор 14.
Следящая система двухстороннего действия работает следующим образом.
При отсутствии нагрузки привод 1 находится в согласованном положении сигналы Uj. на выходе регулятора 4 и I на выходе пpeoбpaзoвaтeлk 8 тока нулевые, величина выходной координаты х,дд равна уставке х, ошибка равна Hyjno.
При возникновении момента внешней нагрузки на выходном валу привода 1 в первый момент времени за счет люфтов и упругости кинематической передачи выходная координата х. незна чительно проседает в сторону действия момента внешней нагрузки. При этом возникает ненулевое рассогласование на входе регулятора 4 (напри- мер ПИД-регулятора), которьм выраба-- тывает сигнал U, воздействующий на преоброзователь 8 тока. Последний создает в двигателе 9 (например двигателе постоянного тока) ток I, определяющий момент противодействия на валу двигателя 9 моменту внешней нагрузки. Ток I растет до тех пор, пока моменты: приложенный к валу задающего органа оператором (момент нагрузки задающего следящего привода 1) и противодействующий ему со стороны двигателя 9, не уравновесятся. Увеличение проседания, а вместе с ним и ошибки рассогласования на входе ре- гулятора 4 прекращается.
Таким образом, указанная ошибка отрабатывается регулятором 4 так, что момент на выходном валу компенсирует
5
0
5
Q Q г
приложенную извне нагрузку. При этом статическая ошибка задающего следящего привода 1 может остаться ненулевой (если привод 1 не обладает ас-, татизмом) либо исчезнуть в случае астатического привода 1. В любом из описанных случаев привод U переходит в новое установившееся состояние.
Для того, чтобы на выходном валу поддерживать уравновешивающий внешнюю нагрузку момент, постоянная составляющая тока I, а следовательно, и выходного сигнала регулятора 4 - U (при условии линейности характеристики преобразователя 8) независимо от алгоритма его функционирования и ошибки в установившемся режиме должна быть пропорциональна внешней нагрузке на валу следящего привода 1. I
Работа исполнительного следящего
привода 2 при компенсации внешних нагрузок, вызванных перемещаемым грузом, аналогична описанной с той лишь разницей, что преобразователь 10 преобразует выходной сигнал U, регулятора 5 в пропорциональный перепад давлений &Р в полостях гидродвигателя 11, который создает пропорциональный перепаду Л Р момент противодействия нйгрузке на выходном валу исполнительного следящего привода 2-.
Таким образом, при приложении к выходным валам следящих приводов 1 и 2 внешних нагрузок на выходе регуляторов 4 и 5 возникают сигналы и л и Uf,, постоянные составлякщие которых содержат информацию об этих нагрузках, а точнее им пропорциональны.
В зависимости от разности сигна-. лов Ufl и и, выделяемой в сумматоре 14, блок 3 интегрирования (например блок двойного интегрирования) изменяет уставку х в направлении и со скоростью, пропорциональной указанной разности. Скорость движения выходных валов исполнительного 2 и задающего 1 следящих приводов пропорциональна разности моментных воздействий со стороны оператора и перемещаемой нагрузки.
В случае наличия в сигналах Ua и и высокочастотных составляющих, присутствующих при широтно- или частот- ноимпульсном управлении исполнительными частями 6 и 7 приводов 1 и 2, указанные составляющие не оказывают влияния на систему двустороннего действия, поскольку ослабляются в блоке
3 интегрирования, имеющем свойства фильтра нижних частот, а также в самих следящих приводах 1 и 2 за счет их линейных, нелинейных искажений и ограниченности частотного спектра полосы пропускания.
Реальные исполнительные части 6 и 7 всегда имеют запаздывание (инерцию) , поэтому общие передаточные функции замкнутых по положению следящих приводов 1 и 2 от сигнала Х к сигналам U и U будут иметь фазовое опережение, поскольку исполнительные части 6 и 7 включены в обратную связь при формировании указанных передаточных функций, т.е. сигналы Ол и и„ возникают чуть раньше, чем компенсирующие моменты на валах следящих приводов 1 и 2, что благотворно сказывается на устойчивости внешнего контура системы двустороннего действия.
При необходимости реализации за- дакяцего следящего привода 1 в виде электрогидро- либо электропневматического необходимо выполнить его исполнительную часть 6 аналогично исполнительной части 7 исполнительного следящего привода 2. При этом работа
Редактор Е.Копча
Составитель Е.Политов
Техред Л.Олейник Корректор Л.Пилипенко
Заказ 708/20 , Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
предлагаемой системы ни по функциям, ни по достигаемому результату не отличается от описанной.
5 Формула изобретения
Следящая система двустороннего действия, содержащая на задающей стороне последовательно соединенные первый регулятор, преобразователь тока и двигатель, связанный с первым датчиком положения, выход которого подключен к первому входу первого регулятора, на исполнительной стороне последовательно, соединенные второй регулятор, электрогидропреобразова- тель и гидродвигатель, связанный с вторым датчиком положения, выход которого подключен к первому входу второго регулятора, а также последовательно соединенные сумматор и блок интегрирования, подключенный выходом к второму входу первого и второго регулятора, отличающаяся тем, что, с целью упрощения и повышения динамической точности системы, в ней первый и второй входы сумматора соединены соответственно с выходом первого и второго регулятора.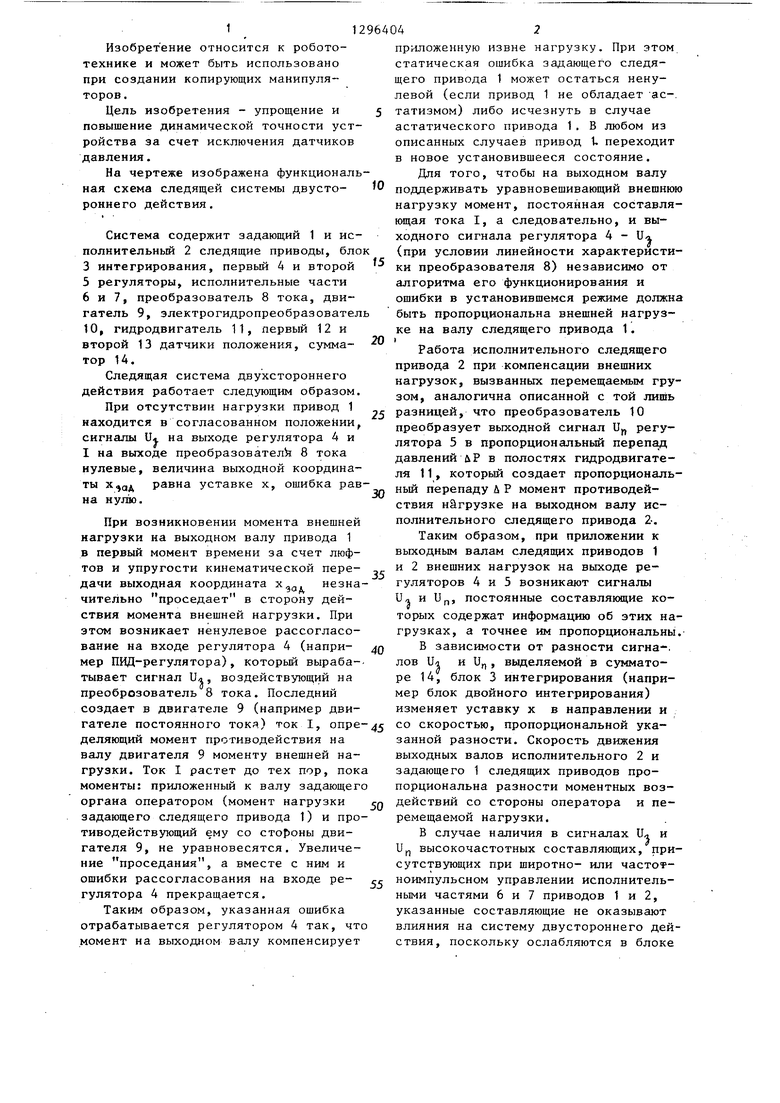
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
Изобретение относится к области робототехники и может быть использовано при создании копирующих манипуляторов . Целью изобретения является упрощение устройства и повьш1ение его динамической точности за счет исключения датчиков нагрузки. Устройство содержит сумматор, блок интегрирования, два регулятора, преобразователь тока, двигатель, электрогидропреобра- зователь, гидродвигатель и два датчика положения. 1 ил.
| Электрогидравлические следящие системы./ Под ред | |||
| Б.А.Хохлова | |||
| М.: Машиностроение, 1971, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
| Проектирование следяпщх систем двустороннего действия/ Под ред | |||
| В.С.Кулешова | |||
| М.: Машиностроение, 1980, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
