Изобретение относится к оборудованию для переработки пластических масс, в частности для автоматизации и механизации процесса удаления готового изделия при литье под давлением пластических масс.
Цель изобретения - расширение номенклатуры удаляемых деталей.
Для достижения поставленной цели в захватном устройстве, содержащем рабочие элементы, механизмы перемещения рабочих элементов и привод, установленные на основании захватного устройства, рабочие элементы имеют свои механизмы перемещения, например типа шестерня-рейка, связанные с общим приводом и размещенные в отдельном корпусе, которые закреплены на основании захватного устройства с возможностью изменения их положения поворотом корпуса вокруг собственной оси и/или перестановки по окружности относительно оси захватного устройства в плоскости основания, причем корпуса механизмов перемещения рабочих элементов установлены в пазах, которые выполнены на основании концентрично оси захватного устройства или в отверстиях, концентрично которым выполнены пазы для фиксации корпусов.
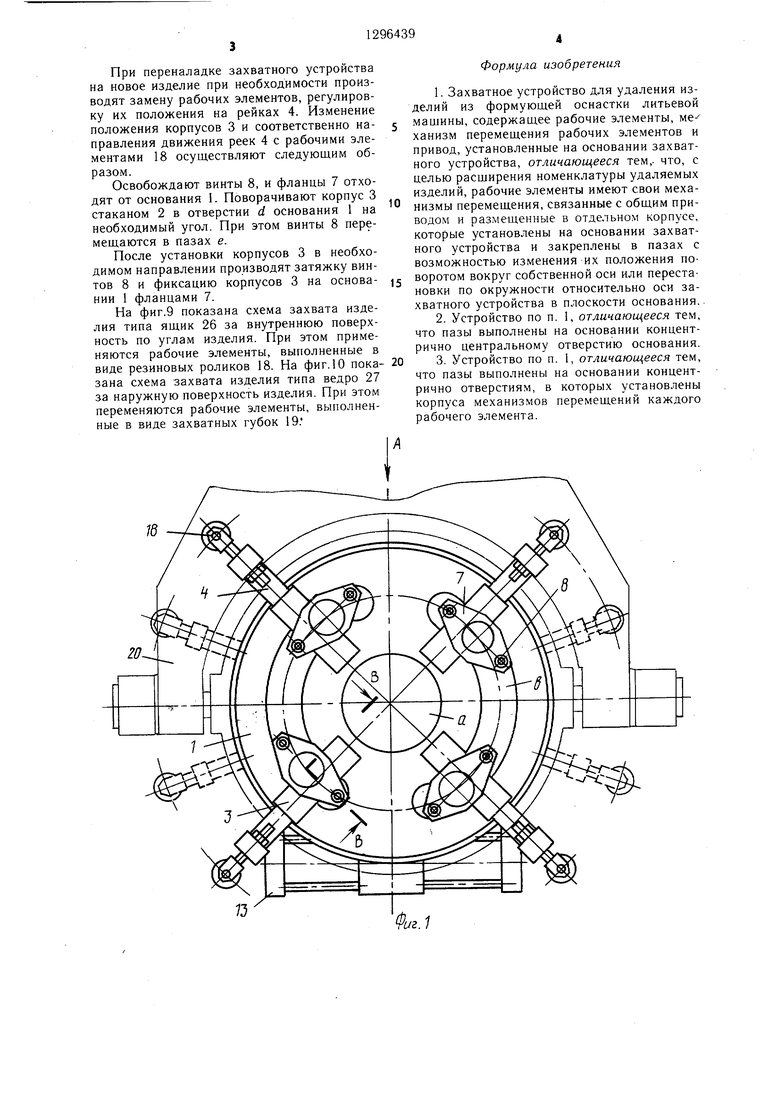
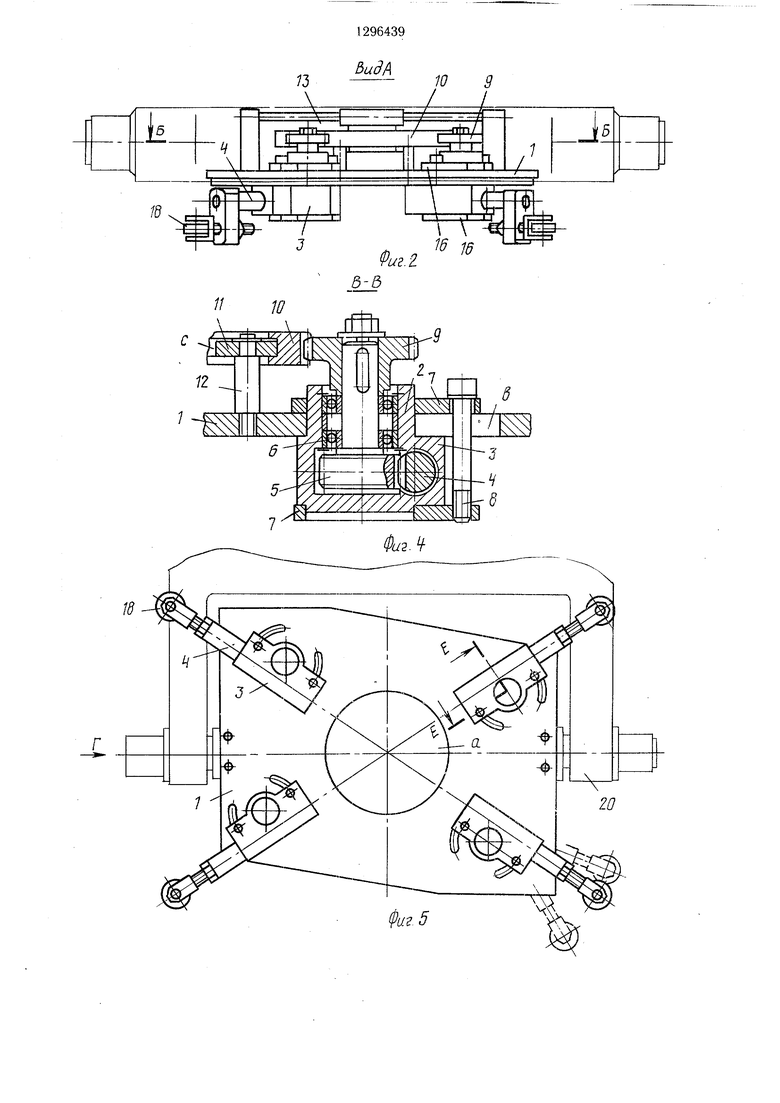
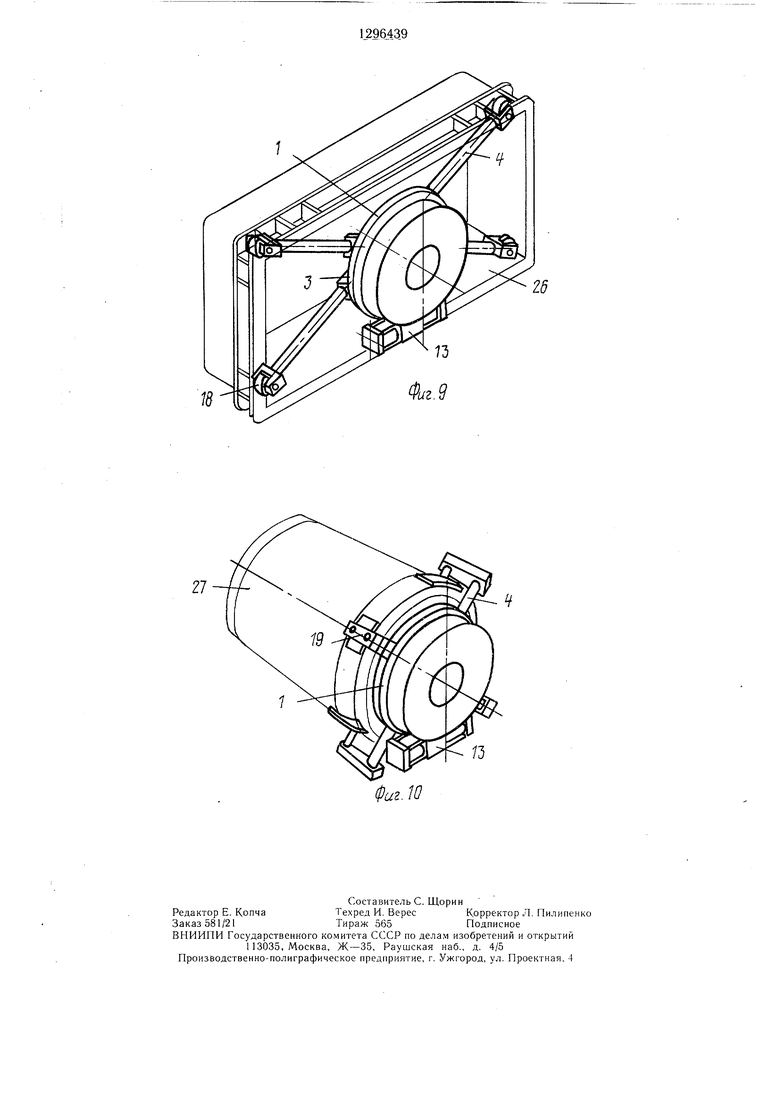
На фиг.1 изображено захватное устройство с зубчатой передачей, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.1; на фиг.5 - захватное устройство с цепной передачей, общий вид; на фиг.6 - вид Г на фиг.5; на фиг,7 - разрез Д-Д на фиг.6; на фиг.8 - разрез Е-Е на фиг.5; на фиг.9 - схема захвата изделия типа ящик; на фиг. 10 - схема захвата типа ведро.
Захватное устройство для удаления изделий из формующей оснастки литьевой машины содержит основание 1, выполненное в виде диска с центральным отверстием а и пазами Ь, расположенными по окружности концентрично отверстию а, которое предназначено для подвода механизма обрезки литника к изделию. В пазы b входят стаканы 2, корпусов 3, в которых установлены рейки 4. Последние входят в зацепление с вал-шестернями 5, установленными на подшипниках 6 в корпусах 3, которые фиксируются на основании 1 с помощью фланцев 7 и винтов 8. На вал-шестернях 5 установлены шестерни 9, входящие в зацепление с центральным зубчатым колесом 10. Последнее выполнено в виде венца с внутренним пазом с, в который входят ролики 11, оси 12 которых закреплены на основании 1. Пневмо- или гидроцилиндр 13, содержащий щток-рейку 14 с поршнями 15, установлен на основании 1. Шток-рейка 14 входит в зацепление с щестерней 16, которая,в свою очередь, входит в зацепление с шестерней 17, а последняя входит в зацепление с цилиндрическим зубчатым колесом 10. На концах реек 4 закреплены рабочие элементы 18, выполненные в виде резиновых роликов. Рабочие элементы могут быть выполнены в виде захватных губок 19. Захватное устройство основанием i соединяется с механизмом 20 ротации манипулятора.
Захватное устройство работает следующим образом.
При подаче давления в одну из поршневых полостей, цилиндра 13, поршни 15 со штоком-рейкой 14 перемещаются, приводя во
вращение щестерню 16. Вращение от последней к шестерне 9 передается через щестерню 17 и центральное зубчатое колесо 10. При вращении шестерни 9 рейка 4 перемещается вал-щестерней 5. При подаче давления в другую поршневую полость цилиндра 13 аналогично производится перемещение рейки 4 в другую сторону. Таким образом, производится синхронное перемещение реек 4 и рабочих элементов 18, при котором осуществляется захват и освобождение изделия.
При переналадке захватного устройства на новое изделие осуществляется при необходимости замена рабочих элементов и регулировка их положения. Регулировка направления движения рабочих элементов 18 с
рейкой 4 осуществляется изменением положения корпусов 3 на основании 1. При этом освобождают винты 8 и фланцы отходят от корпусом 3 и основания 1. Корпуса 3 стаканами 2 перемещают в пазах 6 и их поворотом по оси вал-шестерни 5 производят затяжку винтов 8 и их фиксацию на основании 1. Таким образом, корпуса 3 могут перемещаться по пазам Ь и поворачиваться относительно оси вал-щестерни 5. На фиг.5-8 показан вариант выполнения
захватного устройства с цепной передачей от привода к механизмам перемещения рабочих элементов, который отличается тем, что основание 1 выполнено в виде прямоугольника с центральным отверстием а, четырьмя отверстиями d и пазами е, концентричными отверстиям d. В отверстия d установлены стаканы 2 корпусов 3, а в пазы е проходят винты 8. На вал-щестернях установлены звездочки 21. Цилиндры 22 одностороннего лЧействия с рабочей штоковой полостью, установленные на основании I и содержащие шток 23 и поршень 24, соединены через шток 23 между собой цепью 25, причем последняя обхватывает звездочки 21. Захватное устройство работает следующим образом.
При подаче давления в один из цилиндров 22 его поршень 24 со штоком 23 перемещается и тянет за собой цепь 25. При этом второй поршень 24 и шток 23 принудительно перемещаются вал-щестернями 5. При подаче давления в другой цилиндр 22
перемещается рейка 4 в другом направлении. Таким образом производят перемещение рабочих элементов 18, захватывая и освобождая изделие.
При переналадке захватного устройства на новое изделие при необходимости производят замену рабочих элементов, регулировку их положения на рейках 4. Изменение положения корпусов 3 и соответственно направления движения реек 4 с рабочими элементами 18 осуществляют следующим образом.
Освобождают винты 8, и фланцы 7 отходят от основания 1. Поворачивают корпус 3 стаканом 2 в отверстии d основания 1 на необходимый угол. При этом винты 8 перемещаются в пазах е.
После установки корпусов 3 в необходимом направлении производят затяжку винтов 8 и фиксацию корпусов 3 на основании 1 фланцами 7.
На фиг.9 показана схема захвата изделия типа ящик 26 за внутреннюю поверхность по углам изделия. При этом применяются рабочие элементы, выполненные в виде резиновых роликов 18. На фиг. 10 показана схема захвата изделия типа ведро 27 за наружную поверхность изделия. При этом переменяются рабочие элементы, выполненные в виде захватных губок 19.
Формула изобретения
1.Захватное устройство для удаления изделий из формующей оснастки литьевой машины, содержащее рабочие элементы, ме- ханизм перемещения рабочих элементов и привод, установленные на основании захватного устройства, отличающееся тем,, что, с целью расширения номенклатуры удаляемых изделий, рабочие элементы имеют свои механизмы перемещения, связанные с общим приводом и размещенные в отдельном корпусе, которые установлены на основании захватного устройства и закреплены в пазах с возможностью изменения их положения поr воротом вокруг собственной оси или перестановки по окружности относительно оси захватного устройства в плоскости основания.
2.Устройство по п. 1, отличающееся тем, что пазы выполнены на основании концент- рично центральному отверстию основания.
3.Устройство по п. 1, отличающееся тем, что пазы выполнены на основании концент- рично отверстиям, в которых установлены корпуса механизмов перемещений каждого рабочего элемента.
0
73
Budl
Фиг.-г
W W Г
А-А
Фиг. 7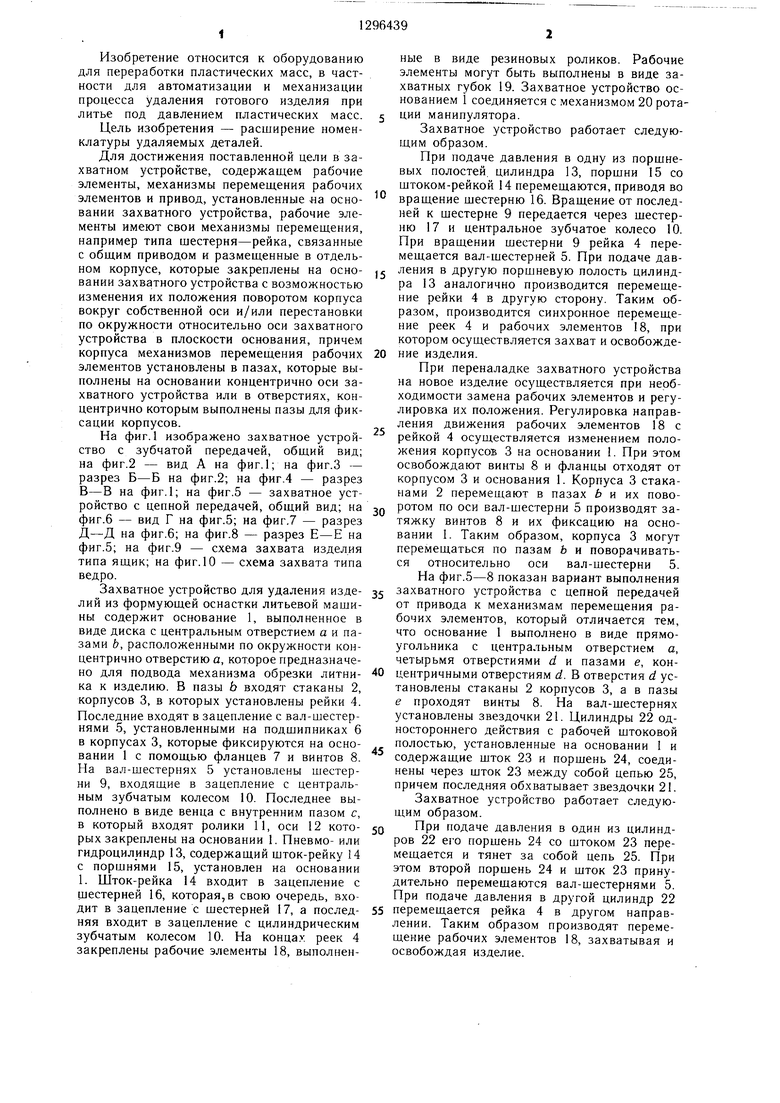
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод сборочного барабана | 1990 |
|
SU1717401A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону штампа | 1983 |
|
SU1082530A1 |
| Двухкулачковый поворотный самоцентрирующий патрон | 1982 |
|
SU1013123A1 |
| Устройство для дуговой сваркиС КОлЕбАНияМи элЕКТРОдА | 1977 |
|
SU795809A1 |
| Автооператор | 1981 |
|
SU1047653A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Кантователь | 1981 |
|
SU1225745A1 |
| Устройство для перемещения деталей с рабочей позиции пресса | 1981 |
|
SU967632A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
Изобретение относится к области оборудования для переработки пластическтих масс, в частности для автоматизации процесса удаления готового изделия при литье под давлением пластических масс. Целью изобретения является расширение номенклатуры удаляемых изделий. Для этой цели захватное устройство выполнено с рабочими элементами, имеюшими индивидуальные механизмы перемещения. Механизм перемеше- ния выполнен в виде рейки 4, входяшей в зацепление с вал-шестернями 5. На вал- шестернях 5 установлены шестерни 9, входя- ш,ие в зацепление с центральным зубчатым колесом 10. Зубчатое колесо 10 выполнено в виде венца с внутренним венцом, в который входят ролики 11, оси 12 которых закреплены на основании I. Зубчатое колесо 10 приводится в действие от шток-рейки 14 гидро-или пневмоцилиндра через зубчатую пару 16, 17. Для перестройки устройства в корпусе выполнены пазы b концент- рично центральному отверстию а. 2 з.п.ф-лы, 10 ил. е (Л 10 |С о О5 4 ОО СО ft/a.J 1i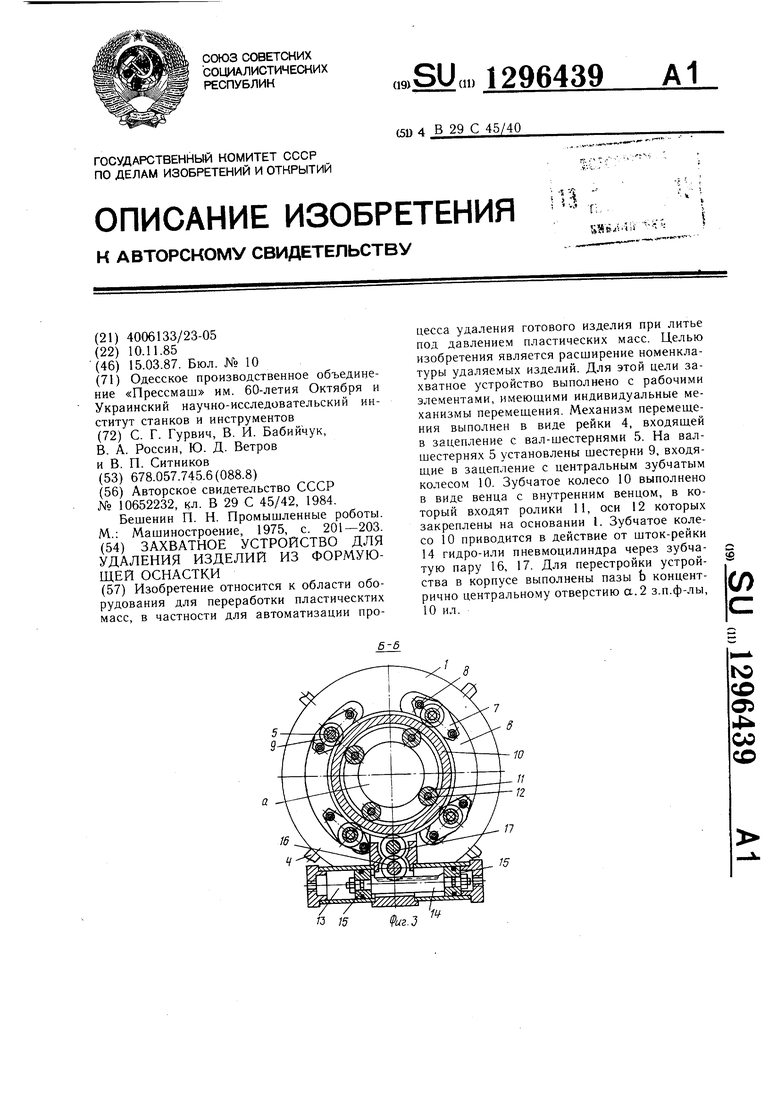
d
////А
73
Фиг.9
/3
Фиг. W
| Авторское свидетельство СССР № 10652232, кл | |||
| Солесос | 1922 |
|
SU29A1 |
| Бешенин П | |||
| Н | |||
| Промышленные роботы | |||
| М.: Машиностроение, 1975, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
