Предлагаемое изобретение относится к робототехнике и может быть использовано в машиностроении.
Известен сват манипулятора [Схват промышленного робота. Авторское свидетельство СССР №210665, Кл. B25J 15/08], содержащий полый корпус, телескопическое звено, электромагнитные фиксаторы, шток с зубчатыми рейками, захватные губки и привод. Телескопические звено и шток установлены внутри корпуса соосно друг друга. А электромагнитные фиксаторы расположены между ними и установлены с возможностью попеременного взаимодействия с корпусом и штоком. При этом электромагниты установлены на телескопическом звене коаксиально фиксаторам. При обесточенном электромагните обеспечивается сцепление фиксаторов с корпусом. В результате этого шток перемещается относительно телескопического звена и осуществляется разведение или сжатие губок. При подаче напряжения на электромагниты фиксаторы войдут в зацепление со штоком. В этом случае при включении привода происходит перемещение телескопического звена.
Данный схват имеет шток с зубчатыми рейками, которые отрицательно влияют на точность и жесткость механизма, усложняя конструкцию.
Наиболее близким к предлагаемому изобретению является устройство [Захват. Авторское свидетельство СССР №1645138 А1, Кл. G01B 15/00], содержащее корпус и зажимные губки, расположенные радиально с возможностью осевого перемещения и кинематически связанные с общим приводом, причем кинематическая связь выполнена в виде зубчатых колес, кроме того, с целью расширения технологических возможностей зажимные губки снабжены фрикционными элементами, закрепленными на корпусе, и выполнены в виде четырех взаимно перпендикулярно расположенных ходовых винтов с заплечиком на рабочем конце, размещенных в центральном отверстии зубчатых колес. При этом фрикционные элементы выполнены в виде П-образных пружин, взаимодействующих боковыми сторонами с ходовым винтом.
Недостатком устройства является наличие четырех ходовых винтов и дополнительных фрикционных элементов, взаимодействующих с их боковыми сторонами, что ограничивает область применения устройства.
Целью изобретения является упрощение конструкции и расширение технологических возможностей охвата.
Поставленная цель достигается тем, что предлагаемое устройство содержит корпус, зажимные элементы, ходовые винты, кинематически связанные с ведущим и ведомыми коническими зубчатыми колесами и электродвигателем, закрепленным на корпусе, причем ведущее коническое зубчатое колесо одето на вал электродвигателя, ходовые винты расположены соосно в центральном отверстии ведомых конических зубчатых колес с возможностью осевого перемещения, при этом зажимные элементы закреплены на двух ходовых винтах, при этом ведущее и ведомые конические зубчатые колеса расположены в перпендикулярных плоскостях, а корпус снабжен крышкой, имеющей направляющий паз для движения зажимных элементов.
Сравнительный анализ с прототипом показал, что предложенное устройство отличается тем, что зажимные элементы закреплены на двух ходовых винтах, при этом ведущее и ведомые конические зубчатые колеса расположены в перпендикулярных плоскостях, а корпус снабжен крышкой, имеющей направляющий паз для движения зажимных элементов.
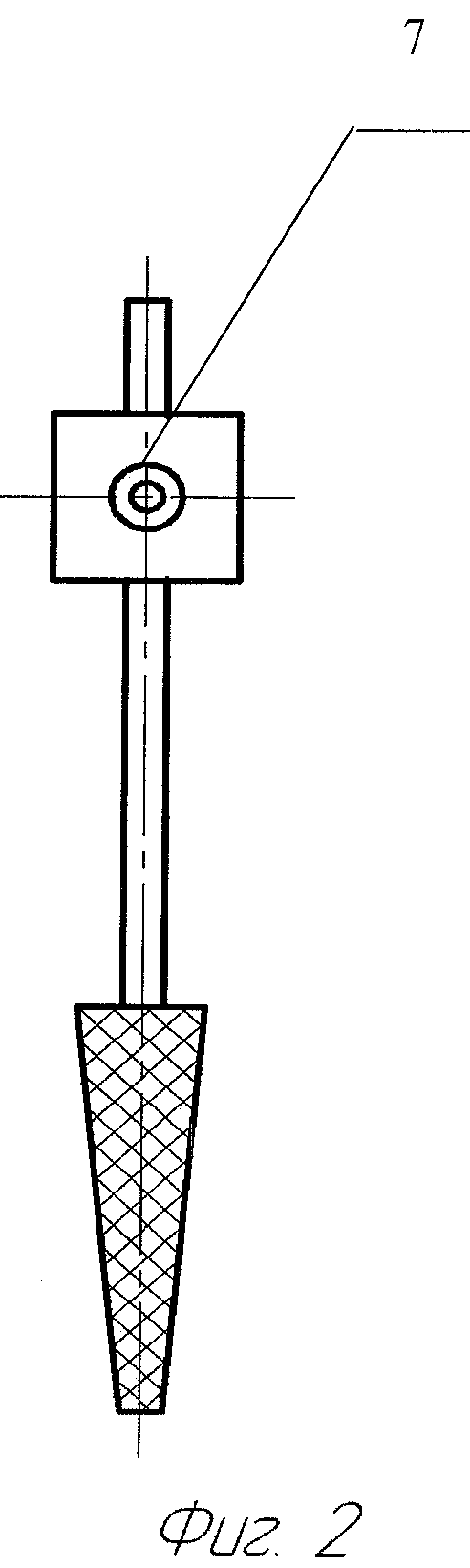
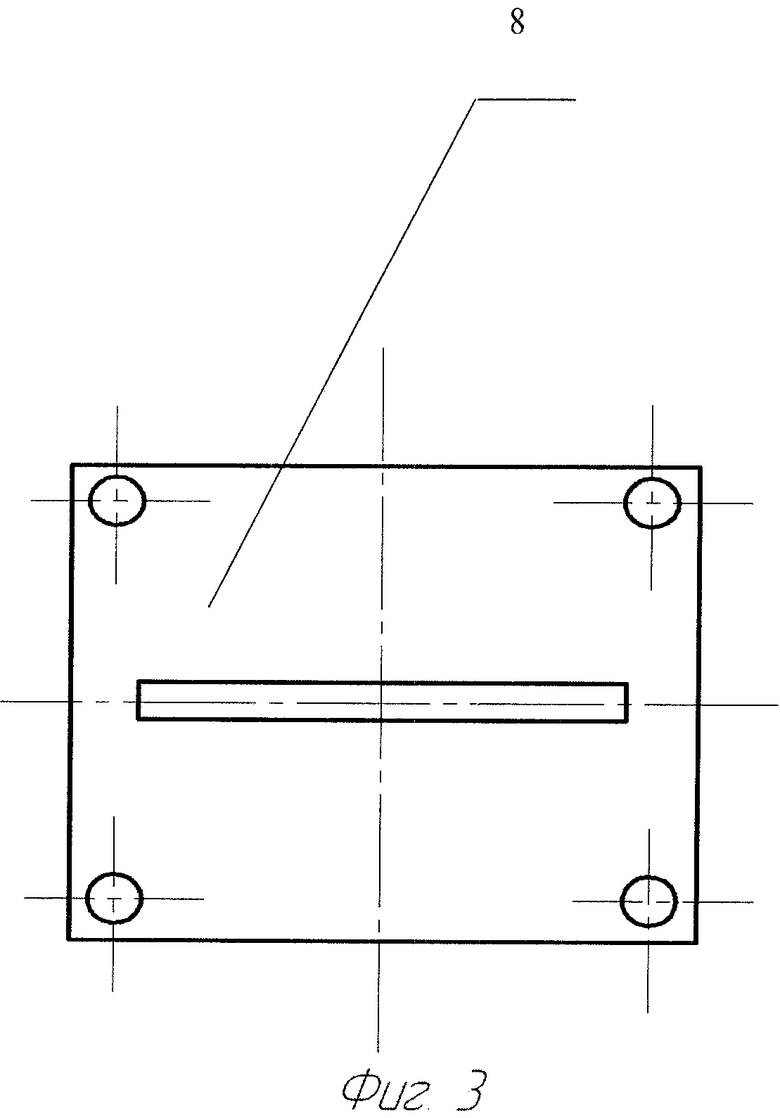
Сущность представленного технического решения поясняется чертежом (фиг.1, фиг.2, фиг.3). Предложенный механизм устройства содержит корпус 1, привод 2, конические зубчатые колеса 3 и 4, ходовые винты 5, винты 6, сменные зажимные элементы 7, крышку корпуса 8, крышки 9, захватываемый объект 10.
Устройство работает следующим образом (фиг.1, фиг.2, фиг.3). Электродвигатель 2, закрепленный на корпусе 1, вращая расположенное на оси ведущее коническое зубчатое колесо 3, передает вращение на конические зубчатые колеса 4, которые сообщают возвратно-поступательное движение ходовым винтам 5 и закрепленным на них винтами 6 сменным зажимным элементам 7 по направляющему пазу крышки корпуса 8, которые захватывают объект 10 и обеспечивают возможность захвата объектов различной формы. При этом паз крышки корпуса 8 исключает угловое перемещение (поворот) ходовых винтов 6.
Губки сменных зажимных элементов 7 могут быть выполнены из упругого материала для исключения возможности повреждения поверхностей объекта 10. Крышка корпуса 8 и крышки 9 обеспечивают герметичность механизма.
Применение устройства позволит повысить точность и надежность захватывания и удержания объектов различной формы, расширить технологические возможности схвата по перемещению объектов. Повышение эффективности захватных устройств подобного типа основано на применении механизма с зубчатой и винтовой передачами, сменными зажимными элементами, герметичностью конструкции, что позволит повысить уровень автоматизации производства, снизить себестоимость изделий и тем самым повысить конкурентоспособность предложенного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВОДНОТРАНСПОРТНОГО МОДУЛЯ | 2009 |
|
RU2415771C2 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Робототехнологический комплекс | 1985 |
|
SU1289677A1 |
| Захватное устройство | 1985 |
|
SU1268406A1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| Червячно-винтовой прямоходный электромеханизм | 2023 |
|
RU2817765C1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |

Предлагаемое изобретение относится к робототехнике и может быть использовано в машиностроении. Схват манипулятора содержит корпус, зажимные элементы, ходовые винты, кинематически связанные с ведущим и ведомыми коническими зубчатыми колесами и электродвигателем, закрепленным на корпусе. Ведущее коническое зубчатое колесо одето на вал электродвигателя. Ходовые винты расположены соосно в центральном отверстии ведомых конических зубчатых колес с возможностью осевого перемещения. Зажимные элементы закреплены на двух ходовых винтах. Ведущее и ведомые конические зубчатые колеса расположены в перпендикулярных плоскостях. Корпус снабжен крышкой, имеющей направляющий паз для движения зажимных элементов. Изобретение позволит повысить точность и надежность захватывания и удержания объектов различной формы, расширить технологические возможности схвата по перемещению объектов. 3 ил.
Схват манипулятора, содержащий корпус, зажимные элементы, ходовые винты, кинематически связанные с ведущим и ведомыми коническими зубчатыми колесами и электродвигателем, закрепленным на корпусе, причем ведущее коническое зубчатое колесо одето на вал электродвигателя, ходовые винты расположены соосно в центральном отверстии ведомых конических зубчатых колес с возможностью осевого перемещения, отличающийся тем, что зажимные элементы закреплены на двух ходовых винтах, при этом ведущее и ведомые конические зубчатые колеса расположены в перпендикулярных плоскостях, а корпус снабжен крышкой, имеющей направляющий паз для движения зажимных элементов.
| Захват | 1989 |
|
SU1645138A1 |
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 1990 |
|
RU2022776C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

